 探索PCAN卡与医疗机器人的革命性结合
探索PCAN卡与医疗机器人的革命性结合

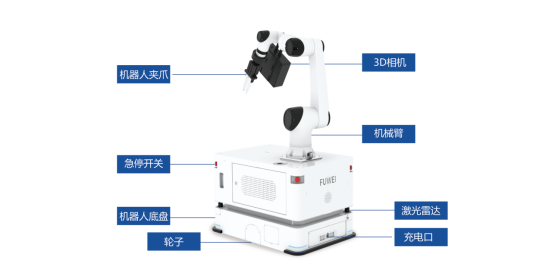
随着医疗技术的不断进步,医疗机器人在提高手术精度、减少感染风险以及提升患者护理质量方面发挥着越来越重要的作用。医疗机器人的精确操作依赖于稳定且高效的数据通信系统,虹科提供的PCAN四通道mini PCIe转CAN FD卡,正是为了满足这一需求而设计的高性能通信解决方案。
01#
应用背景
在医疗机器人的应用中,精确控制和实时反馈至关重要。CAN FD(CAN with Flexible Data Rate)作为一种先进的通信协议,以其高速的数据传输能力和改进的时间戳精度,为医疗机器人提供了更为可靠的通信保障。然而,将CAN FD技术应用于基于ARM架构的Linux系统平台,需要一个能够支持该协议并且与Linux系统兼容的硬件解决方案。
02#
虹科解决方案
为了实现上述目标,我们采用了虹科PCAN-mini PCIe FD四通道CAN FD卡,结合基于ARM架构的Linux操作系统,成功驱动了医疗机器人的电机。
项目需求
■需要能够支持高速数据传输的通信接口
■ 需要在Linux操作系统上稳定运行的驱动程序
■ 需要能够适应医疗环境中的电磁干扰
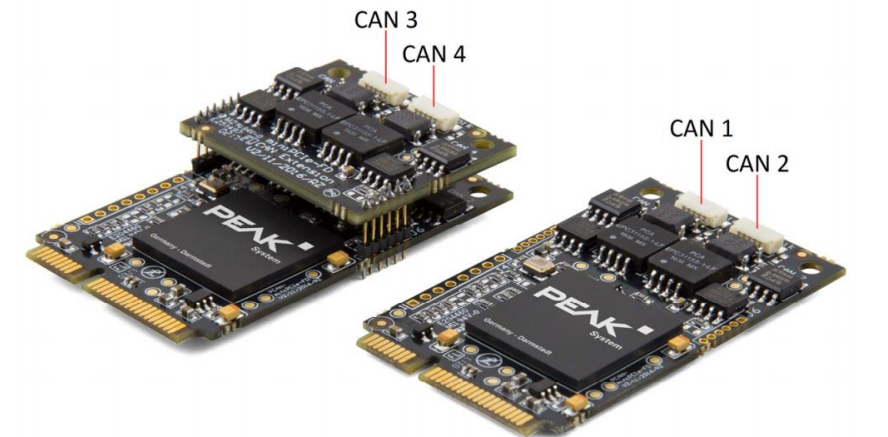
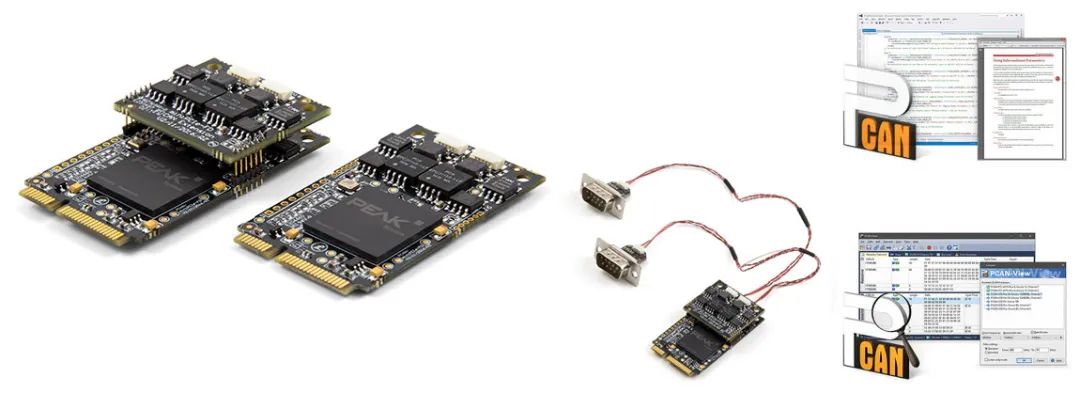
虹科 PCAN-mini PCIe FD
在确保硬件高性能和软件兼容性的同时,还特别关注了通信参数的配置,以进一步优化系统性能。解决方案中包括了以下几个关键点:
虹科PCAN-mini PCIe FD 四通道CAN FD卡 提供了所需的高速数据传输能力,支持CAN FD协议,使得数据传输速度更快,满足实时控制的需求。
Linux驱动程序 利用PCAN驱动程序的交叉编译特性,客户能够轻松地在ARM架构的Linux系统上部署驱动程序,确保了系统的稳定运行。
CAN FD波特率配置 设置为仲裁域1M、数据域4M,以满足高速数据传输的需求。
效果评估
■实时性:CAN FD协议的高速数据传输能力,使得医疗机器人能够实现更快的响应时间
■稳定性:Linux驱动程序的稳定运行,保证了医疗机器人在长时间工作过程中的可靠性
■抗干扰性:巧妙的电路设计,提高了设备的抗干扰能力,确保了通信的稳定性
03#
虹科方案优势
虹科 PCAN-mini PCIe FD
虹科PCAN-mini PCIe FD(了解详情)是一款高性能的四通道mini PCIe转CAN FD卡,专为需要高速数据传输和多通道应用的领域设计。该产品支持CAN FD协议,能够实现更快的数据传输速度,是医疗机器人、汽车、工业自动化等领域的理想选择。
01
高速数据传输
支持CAN FD协议,每个CAN FD帧最大64个数据位,可使用12Mbit/s的比特率进行传输,实现更快的数据传输速度,满足实时控制的需求。
02
多通道能力
四通道设计,为复杂的通信任务提供灵活性和扩展性。
03
操作系统支持
提供针对Windows和Linux操作系统的驱动支持,支持ARM架构,确保在多种平台上的稳定运行。
04
向下兼容性
与现有的CAN 2.0 A/B标准向下兼容,确保现有网络的平滑升级。
虹科PCAN-mini PCIe FD卡的成功应用,展示了虹科在医疗机器人领域的技术实力和解决方案的可靠性。我们将继续为客户提供高质量的产品和服务,助力医疗行业的技术进步。
-
CAN
+关注
关注
59文章
3097浏览量
473574 -
医疗机器人
+关注
关注
3文章
225浏览量
56795 -
虹科电子
+关注
关注
0文章
781浏览量
15366
发布评论请先 登录
小米开源VLA大模型后训练全流程:亚毫米级操作突破引领机器人产业革命
基于米尔RK3576核心板的国产割草机器人解决方案
如何实现机器人的精准控制?虹科PCAN-M.2 接口卡高效赋能人机交互

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
探索Xilinx Kria KR260机器人入门套件:开启机器人应用开发新旅程
机器人内部零配件的生产加工厂从哪找?
探索RISC-V在机器人领域的潜力
移动的智慧:复合机器人开启24小时不间断上下料新纪元
医疗物流的智能革命:人形机器人如何重塑医疗物资配送体系

Robrain V2.0正式登场:落地人形机器人,引爆智能进化革命

MT6701高分辨率磁编ic:机器人关节智能控制提供精准实时角度数据




评论