 小米汽车组织架构重大调整,加速推进年内端到端智能驾驶交付
小米汽车组织架构重大调整,加速推进年内端到端智能驾驶交付

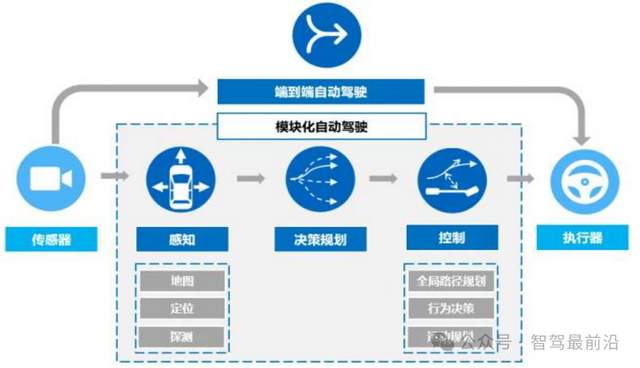
小米智能驾驶团队近日宣布完成重大组织架构调整,标志着其在智能驾驶技术领域的战略深化。此次调整中,原有的“感知”与“规控”两大二级部门被整合为全新的“端到端算法与功能部”,这一变革旨在加速量产方案的研发进程,并引领小米汽车从传统的模块化开发模式,向更加高效、集成的端到端大模型技术路线全面转型。据悉,小米汽车正全力冲刺,目标是在年内实现端到端智能驾驶技术的交付应用。
与此同时,小米内部负责自动驾驶前沿技术预研的团队被正式确立为重点发展部门,承担起推动L3/L4级高级别自动驾驶产品从研发迈向市场应用的重大使命。这一举措进一步彰显了小米在自动驾驶技术领域的雄心壮志和长远布局。
目前,小米智能驾驶团队规模庞大,横跨北京、上海、武汉三地,总人数已接近1200人,构成了一支实力雄厚的技术研发力量。面对量产方案进展不及预期的挑战,重组后的“端到端算法与功能部”将肩负起开发包含激光雷达与不含激光雷达两套并行技术方案的重任,以确保产品能够适应不同市场需求,加速推进智能驾驶技术的普及应用。
今年早些时候,小米CEO雷军在公开场合表达了对智能驾驶领域的坚定信心。他透露,小米在该领域的研发投入巨大,研发团队规模已超千人,并计划在今年年底前突破1500人。雷军还自豪地表示,小米的智能辅助驾驶系统全系自研,将全系标配包括高速领航、一键代客泊车、智能泊车辅助等在内的多项先进功能,并推出Xiaomi Pilot Pro和Xiaomi Pilot Max等高端版本。他坚信,小米智能驾驶将迅速成长为业内进步最快、进展最猛的力量之一,并力争在2024年内跻身行业第一阵营。
在硬件配置方面,小米SU7系列汽车搭载了强大的智能驾驶硬件组合,包括2颗英伟达Orin芯片提供高达508TOPS的算力支持,以及1颗激光雷达、11颗高清摄像头、3颗毫米波雷达和12颗超声波雷达等多元传感器,共同构建了一个全方位、高精度的环境感知系统。在软件层面,小米汽车则充分发挥AI技术的优势,全面自研底层算法,并对BEV(鸟瞰图)、Transformer、OCC占用网络等关键AD技术进行全面融合与创新应用,同时积极引入大模型技术,为智能驾驶系统注入更强大的智能与灵活性。
-
智能驾驶
+关注
关注
5文章
3046浏览量
51379 -
辅助驾驶
+关注
关注
1文章
437浏览量
15834 -
小米汽车
+关注
关注
1文章
351浏览量
7112
发布评论请先 登录
为什么一段式端到端自动驾驶很难落地?

自动驾驶端到端为什么会出现黑盒现象?

行业首个基于地平线单征程6M芯片的端到端城市NOA方案正式交付上车
如何训练好自动驾驶端到端模型?

自动驾驶中端到端仿真与基于规则的仿真有什么区别?
黑芝麻智能端到端全栈式辅助驾驶系统的应用场景

蔚来端到端模型化架构如何大幅提升安全上限
博世一段式端到端方案打造智能辅助驾驶体验
Nullmax端到端自动驾驶最新研究成果入选ICCV 2025

为什么自动驾驶端到端大模型有黑盒特性?






评论