 旗晟机器人环境检测算法有哪些?
旗晟机器人环境检测算法有哪些?

智能巡检机运维系统,作为现代工业自动化与智能化发展的重要成果,正逐步渗透到石油化工、电力、矿山、轨道交通等多个关键领域。为了真正实现在各种复杂场景下的高效巡检运维目标,不仅需要先进的巡检机器人作为硬件支撑,更离不开强大的算法库作为软件核心,二者相辅相成,缺一不可。今天就来了解旗晟机器人环境检测算法。
1、设施异常监测
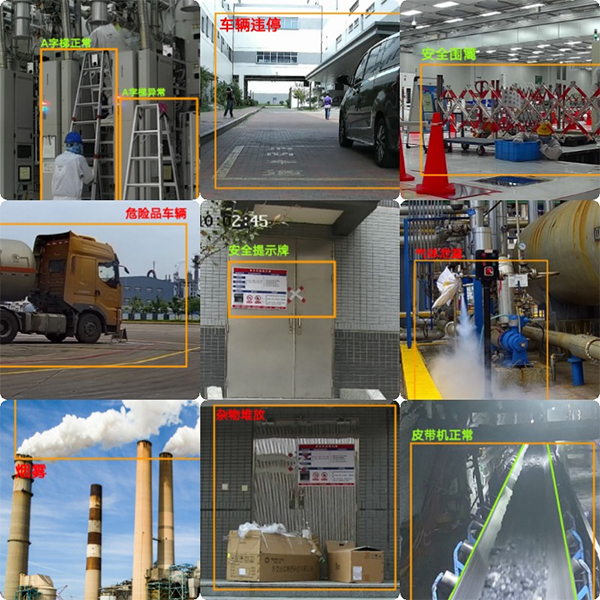
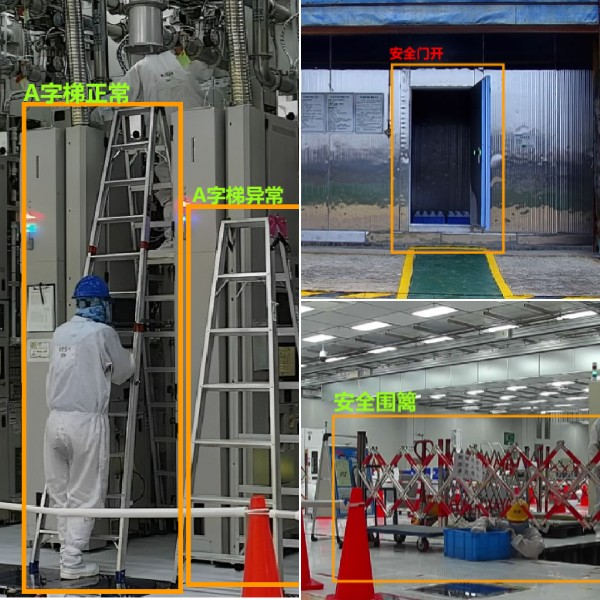
通过集成高精度传感器与智能图像识别技术。它不仅能检测A字梯是否存在变形,还能精确评估梯脚防滑垫的磨损状况,确保攀爬安全。同时,机器人还能检查安全门的开合流畅度,识别门锁异常及卡顿现象,保障紧急疏散通道的畅通无阻。此外,对于安全围篱的完整性及安全提示牌的清晰度、安装稳固性,机器人同样进行逐一排查,确保安全标识的有效性与合规性。
2、危险情况检测的即时性
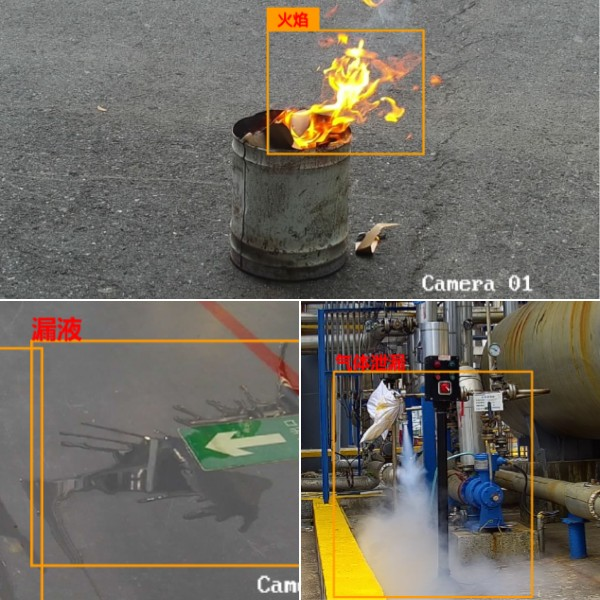
面对潜在的安全威胁,它利用先进的火焰烟雾探测器和温度传感器,实时监测火焰烟雾的浓度、大小、位置及温度变化,为火灾预警提供准确数据。同时,通过气体检测传感器,机器人能迅速识别气体泄漏的种类、估算泄漏量并追踪扩散范围,为紧急处理赢得宝贵时间。对于液体泄漏,机器人则能分析漏液类型、流速等关键参数,助力精准定位泄漏源,防止事态扩大。
3、违规行为与设备监测的智能化
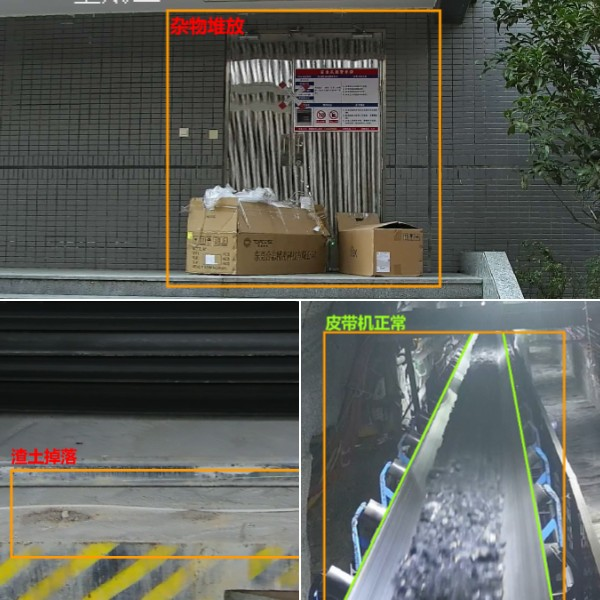
具备强大的违规行为与设备状态监测功能。它利用机器视觉技术,自动识别生产区域内的杂物种类、位置及堆放情况,有效遏制安全隐患。对于违规骑行行为,机器人能准确记录速度、载人情况及骑行区域,为安全管理提供有力支持。在设备监测方面,机器人对皮带机的运行状态进行全方位监控,包括跑偏程度、皮带撕裂情况、滚筒和托辊的运行状态及皮带速度等,确保生产设备的安全稳定运行。
4、车辆运行与停放管理的规范化
在车辆管理方面同样展现出卓越的能力。它能准确识别危险品车辆的运输物品类型及防护措施,确保运输安全。同时,机器人还能监测叉车、货车、客车等车辆的停放情况,确保车辆停放规范有序,不阻碍生产通道,维护良好的生产秩序。
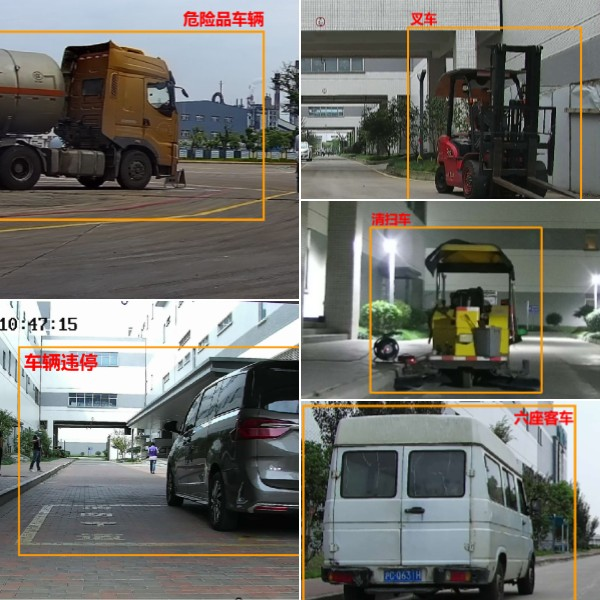
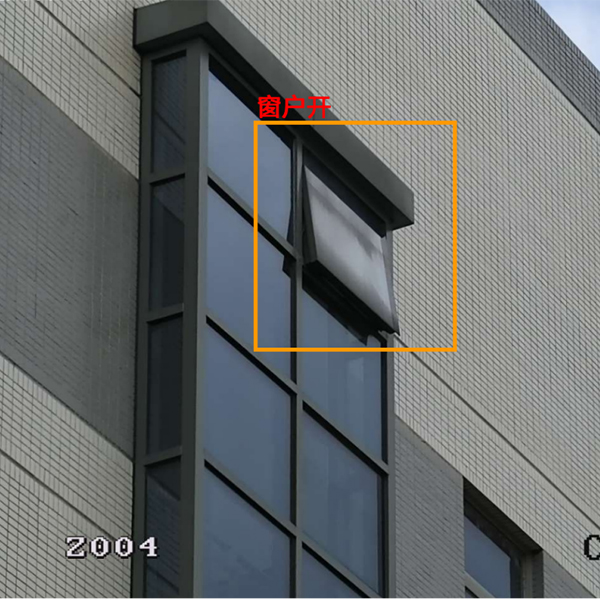
5、建筑物状态监测的全面性
通过非接触式测量与图像分析技术,对窗户的密封性、玻璃的完整性进行定期检查。对于渣土堆积情况,机器人能精确计算堆积体积并评估其潜在影响范围,预防高空坠物等安全事故。此外,机器人还能检测外墙饰面的脱落、空鼓、裂缝等问题,为建筑物的维护与修缮提供科学依据,保障生产环境的稳定与安全。
旗晟机器人环境检测算法以其精准、高效、全面的特点,正在为各行各业的巡检运维工作带来革命性的变化。如果您正在寻找一款能够显著提升巡检效率、保障生产安全的智能巡检解决方案,那么旗晟机器人无疑是您的理想选择。我们诚邀您咨询了解更多关于旗晟机器人的详细信息,共同探索智能巡检的新未来!
审核编辑 黄宇
-
算法
+关注
关注
23文章
4805浏览量
98561 -
AI视觉
+关注
关注
0文章
117浏览量
5007
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?

探索RISC-V在机器人领域的潜力
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
智能复合机器人:纠偏算法如何重塑工业精度与效率?



评论