 北卡罗来纳州立大学:加速外骨骼机器人控制系统的研发
北卡罗来纳州立大学:加速外骨骼机器人控制系统的研发

在科技日新月异的今天,生物医学工程领域的进步尤为引人注目。近日,国际知名学术期刊《自然》杂志发表了一项重要研究成果,报道了北卡罗来纳州立大学苏浩团队在生物医学工程领域的一项重大突破——他们成功开发了一种模拟框架,这一框架有望极大加速外骨骼机器人控制系统的开发,从而推动外骨骼装置在现实世界的广泛应用。
外骨骼机器人,这一科幻电影中常见的未来科技产物,如今已逐步走进现实生活。它通过穿戴在人体外部,为穿戴者提供额外的动力支持,显著提升了人类运动能力,并为残疾人士带来了恢复运动能力的希望。然而,尽管前景广阔,但外骨骼机器人的控制系统开发却面临诸多挑战。
传统的外骨骼机器人控制器在匹配不同个体需求和复杂的人体运动时显得力不从心。它们通常需要依赖大量的人体测试,通过手工制作的规则来适应各种情况,这不仅耗时耗力,而且限制了外骨骼机器人的广泛应用。更为棘手的是,之前的模拟研究大多只关注于外骨骼机器人的机械性能,而忽略了控制器设计以及人类与机器人的交互,这使得从模拟过渡到现实世界应用变得困难重重。
为了突破这一瓶颈,北卡罗来纳州立大学的苏浩团队迎难而上,成功开发了一种全新的模拟框架。这一框架的独特之处在于,它能够从人类与装置的交互中不断学习,从而优化控制策略。与传统的控制器开发方法相比,这一框架无需进行漫长的人体实验,也无需耗费大量的人力资源。
在模拟环境中,该框架能够生成人体运动、肌肉协调和外骨骼控制的三个互联神经网络。这些神经网络之间紧密相连,形成了一个复杂的系统。通过对模型进行数百万次的模拟试验,研究人员验证了框架从人体移动数据中学习的能力。这种能力使得控制器能够更加准确地预测和适应人体的运动需求,从而提供更为精准的动力支持。
为了验证控制器在现实世界中的性能,研究团队对一名佩戴髋关节外骨骼的使用者进行了测试。在跑步、走路和爬楼梯等多种活动场景中,控制器均表现出了优异的性能。实验结果显示,在行走时,使用者的代谢率降低了24.3%;在跑步时,代谢率降低了13.1%;在爬楼梯时,代谢率降低了15.4%。这些令人瞩目的数据表明,该控制器能够在不同活动中成功协助使用者,减轻他们的运动负担。
尽管这一成果令人振奋,但研究团队并未止步于此。他们表示,目前仍需开展进一步的研究来拓宽这些控制器的应用范围,使其能够适应更多的个体和任务。未来,随着技术的不断进步和研究的深入,我们有理由相信外骨骼机器人将在医疗康复、工业生产等领域发挥更加重要的作用。
-
控制系统
+关注
关注
41文章
6989浏览量
114389 -
机器人
+关注
关注
213文章
31470浏览量
223699
发布评论请先 登录
Wolfspeed任命于代辉为大中华区总裁
「喜报」三千步斩获机器人应用典型案例奖,引领智慧康养新风范
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
中国科学院研发3D手型微纳机器人
ADI借助NVIDIA Jetson Thor平台加速人形机器人研发进程
ADI安全产品如何简化不同机器人控制系统中安全机制的实现

从机械传动到智能协同,雅特力助力外骨骼机器人应用创新发展

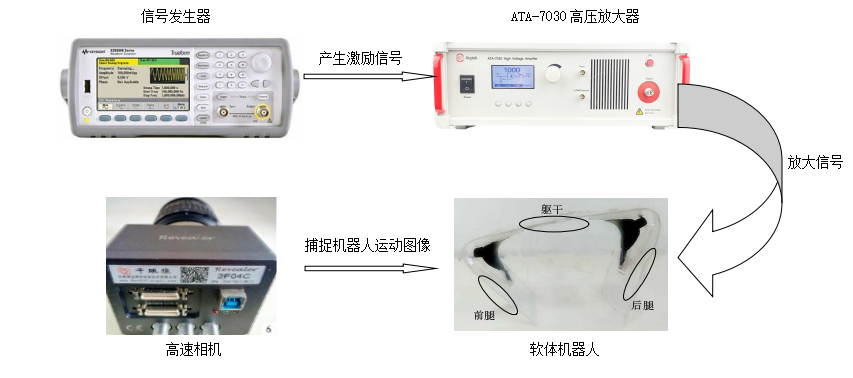
安泰高压放大器在微纳机器人研究中的应用介绍
树莓派驱动的智能假肢:用眼感知,用心行走!

Wolfspeed破产重组 SiC行业格局生变



评论