 恩智浦MCX微控制器增强移动机器人电机控制能力
恩智浦MCX微控制器增强移动机器人电机控制能力

移动机器人的卓越性能、平稳运动和可靠运行离不开高效精确的电机控制。机器人的自主性和复杂性不断提高,非常需要能够处理复杂电机控制和其他任务的高级微控制器。恩智浦新一代MCX微控制器产品组合具有先进的外设,可帮助开发人员优化移动机器人系统中的电机控制。
MCX A和N系列具有通用、高配置的增强型Flex脉宽调制器 (eFlexPWM) 模块,可实现精确的电机控制,并提供广泛的功能集,满足移动机器人应用的各种需求。除了驱动电机的高级控制外,eFlexPWM模块还可用于构建开关式电源。
eFlexPWM模块的一个主要功能是支持中心对齐、边沿对齐和非对称脉宽调制 (PWM)。
中心对齐PWM可保持相位对齐,并将无刷直流 (BLDC) 电机的电流波纹降至最低,这种电机因其高效率和扭矩密度而常用于移动机器人领域。开发人员采用中心对齐PWM,可以实现更平稳的电机运行,减少电磁干扰 (EMI),并延长电机绕组的使用寿命。
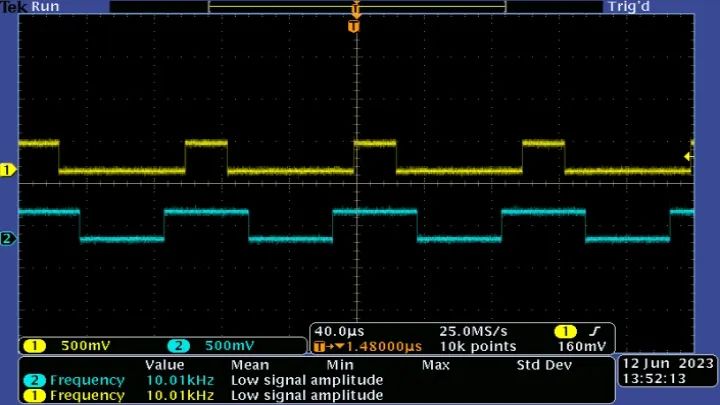
中心对齐PWM信号
边沿对齐PWM可简化占空比计算,并更轻松地控制H桥电路,在移动机器人领域应用广泛,可用于双向电机控制、精确定位和速度调节。FlexPWM模块简化了H桥电路必要控制信号的生成,降低了软件复杂性,并提高了固件响应速度。
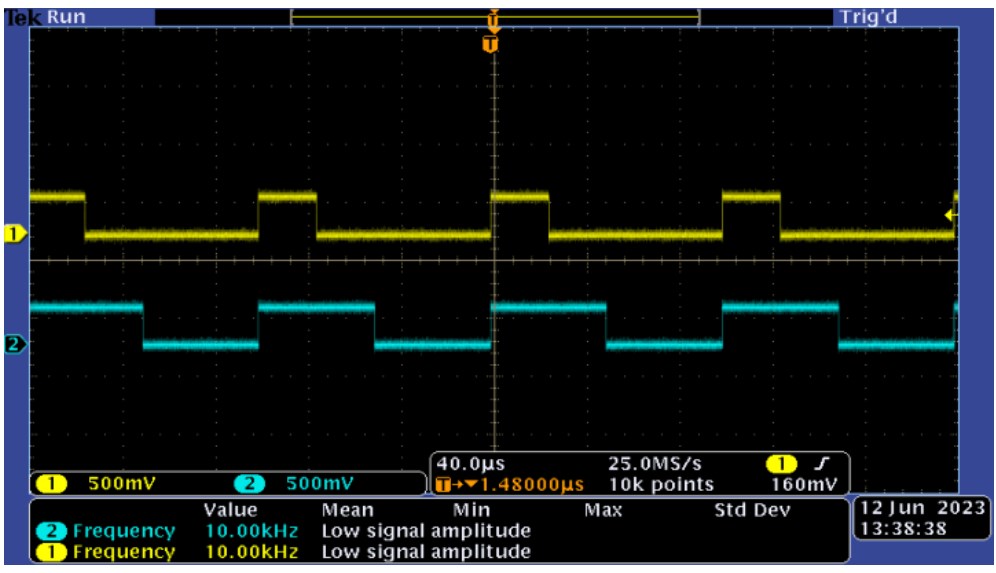
边沿对齐PWM信号
FlexPWM模块还提供相移PWM,这对于涉及多相逆变器的移动机器人应用来说是一个有价值的功能。开发人员对PWM信号进行移相,可同时优化多台电机的供电,确保多自由度的系统 (如机械臂或多轮平台) 实现平稳协调的运动。
FlexPWM模块还具备强大的故障保护和自动故障清除机制,确保系统安全可靠。一旦检测到故障,该模块会立即切断PWM输出,防止对电机绕组等敏感部件造成损害。故障排除后,该模块可自动清除故障状态,并恢复正常运行,最大限度地减少停机时间,增强整个系统的稳健性。
有关MCX N系列功能和外设的更多信息,点击阅读白皮书>>
正交解码器 (QDC)
移动机器人需要精确的位置和速度反馈,才能形成有效的闭环控制系统。MCX微控制器具有正交解码器 (QDC) 模块,这是一种专用外设,可简化正交编码器信号的解码过程,并提供可靠的位置和速度测量。
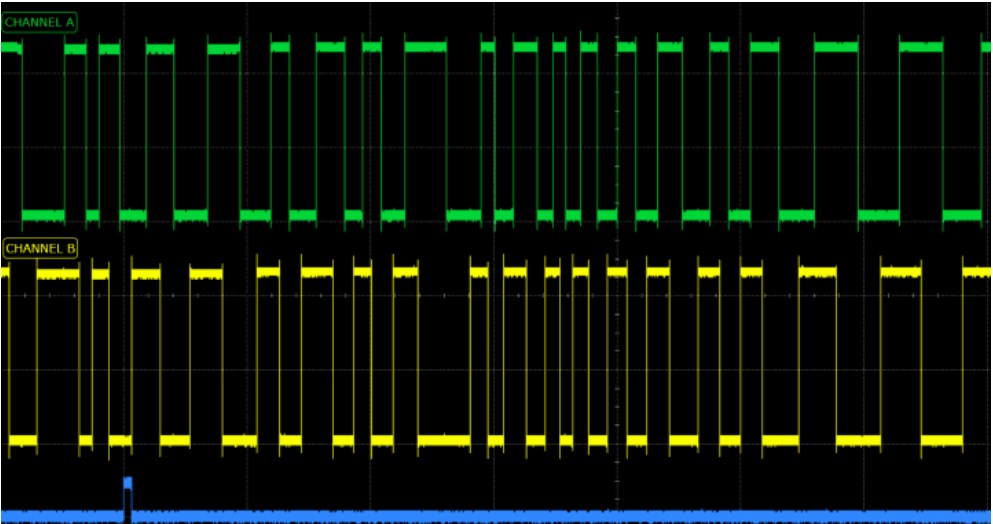
QEI
正交编码器生成两个正交信号,即A相和B相,它们的相位相差90度。QDC模块通过分析信号的顺序和频率确定电机轴的位置和旋转方向。该模块的高级功能,如干扰滤波和边缘检测,可确保解码位置和速度数据的完整性与可靠性,即使在存在电气噪声或信号干扰的情况下也能保障。
QDC模块在计数器初始化方面具有灵活性,支持开发人员根据特定事件或情况调整计数器的位置。例如,计数器可根据编码器每转一圈产生的索引脉冲进行初始化。这一功能还简化了归位例程和绝对定位的实施。此外,QDC模块还支持根据外部传感器或开关触发的归位信号进行初始化,从而实现移动机器人系统的精确控制和校准。
QDC模块提供多种速度测量方法,可满足不同的应用需求。开发人员可以通过监测固定时间间隔内的位置变化、平衡分辨率和响应时间来计算电机速度。此外,该模块还可以测量连续正交边沿之间的累计时间,提供高分辨率速度测量,适合需要快速响应和精细控制的应用。
AND/OR INVERT (AOI) 模块
在优化电机控制方面,MCX A系列中的AOI模块与FlexPWM和QDC模块相辅相成。AOI模块支持开发人员创建可编程组合布尔逻辑,根据特定输入条件生成事件输出。在MCX N系列微控制器中,两个AOI模块和一个可配置触发器构成了事件生成器 (EVTG) 模块。
AOI模块为电机控制提供了高效的解决方案,可以从主处理器分流事件检测和触发器生成任务,从而减少固件开销并提高系统响应速度。通过配置AOI模块来监测位置、速度或故障状态等各种输入信号,开发人员可以创建自定义硬件触发器,启动特定的电机控制操作,而无需持续的软件干预。
例如,AOI模块能够被设定,在满足特定条件组合时生成触发信号,例如当电机位置达到预定阈值且速度在一定范围内时。然后,此触发信号可用于自动调整PWM占空比、更改电机换向序列或执行任何其他所需的电机控制操作。
开发人员可以利用AOI模块的可编程逻辑,实施复杂的控制策略,对实时事件做出快速反应,提高整体性能和效率。AOI模块非常灵活,支持根据每个应用的具体要求创建自定义触发条件,使开发人员能够根据其机器人平台的独有特点优化电机控制。
FRDM-MC-LVPMSM扩展板
恩智浦提供的FRDM-MC-LVPMSM扩展板有助于电机控制应用的开发和原型设计。FRDM板结合了软硬件资源,可加速设计过程。它采用shield扩展板外形设计,可与恩智浦的Freedom开发板平台无缝集成。
FRDM-MC-LVPMSM扩展板与恩智浦永磁电机控制参考软件相结合,可提供完整的电机控制参考设计。该软件套件包括一系列预配置电机控制算法、库和示例项目,使开发人员能够针对其特定的移动机器人应用快速实施和优化电机控制系统。
此扩展板采用低压三相永磁同步电机 (PMSM),由于其高效率、高扭矩密度和精确控制能力,广泛用于移动机器人领域。此外,该板还包括功率模块、电流检测电路和编码器接口等基本组件,为电机控制开发提供了完整的平台。
开发人员利用FRDM-MC-LVPMSM扩展板和相关参考软件,可以显著减少设计和验证移动机器人电机控制系统所需的时间和精力。该板与FRDM-MCX开发平台兼容,可实现无缝集成,使开发人员能够根据其特定应用要求选择合适的微控制器。
MCUXpresso开发人员体验
恩智浦提供了低成本的FRDM开发平台,可使用MCX快速进行原型设计。FRDM开发板具有标准规格和接头,便于连接MCU的输入/输出端口,并内置了MCU-Link调试器,带有USB-C线缆。
恩智浦的GitHub还允许访问应用示例,可以使用应用代码中心门户 (ACH) 访问这些示例。
MCUXpresso IDE和MCUXpresso for VS Code内置了ACH浏览功能,开发人员可以轻松搜索可用的演示和示例,并在直接加载项目使用之前按设备、应用技术或外设/功能进行筛选。
扩展板中心 (EBH) 是NXP SDK Builder网站的扩展,开发人员可以在其中找到恩智浦及其合作伙伴提供的一系列附加板,以扩展所选评估板的功能。该中心提供直观的筛选功能,可快速查找板卡和可用的支持软件。开发人员可以将他们的板与不同类型的扩展板配对,以评估特定用例或应用程序并进行快速原型设计。
恩智浦移动机器人电机控制解决方案
恩智浦的MCX微控制器产品组合代表了电机控制技术的重大进步,提供了一整套外设,专用于优化移动机器人应用中的电机控制。
FlexPWM模块具有较高的灵活性和可靠性,支持精确电机控制,而正交解码器 (QDC) 模块则提供闭环控制系统所需的精确位置和速度反馈。AOI/EVTG模块增加了一层可编程逻辑,使开发人员能够创建自定义硬件触发器,并分流主处理器的事件检测功能。
审核编辑:刘清
-
微控制器
+关注
关注
49文章
8910浏览量
166045 -
电机控制
+关注
关注
3602文章
2230浏览量
279541 -
恩智浦
+关注
关注
14文章
6144浏览量
155287 -
移动机器人
+关注
关注
2文章
820浏览量
34974
原文标题:增强移动机器人电机控制能力:MCX微控制器是如何做到的?
文章出处:【微信号:NXP客栈,微信公众号:NXP客栈】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
恩智浦MCX A346微控制器加速电机控制和光伏应用创新
恩智浦MCX A微控制器家族迎来重大升级

恩智浦MCX E31系列微控制器深度解析

恩智浦推出基于MCX A34系列MCU的电感式编码器方案
探索 NXP MR - CANHUBK344 评估板:为移动机器人应用赋能
Infineon移动机器人电机控制方案深度解析
恩智浦MCX C系列MCU助力实现高效迁移
恩智浦MCX A34混合信号微控制器深度解析

恩智浦自主移动机器人设计要点

恩智浦发布专用无线微控制器平台MCX W23
恩智浦推出电机控制应用的MCX A34x微控制器

海默RC系列机器人控制器





评论