 VL53L8CX TOF开发(2)----设置自主模式
VL53L8CX TOF开发(2)----设置自主模式

概述
"自主模式"(Autonomous mode)通常指的是设备或系统能够在没有外部输入的情况下独立完成任务。对于传感器,如VL53L8,自主模式可能意味着传感器可以独立、定期地进行测量,而不需要来自主控制器或主机的每一次单独指令。
最近在弄ST的课程,需要样片的可以加群申请:615061293 。
选择使用自主模式的原因可能包括:
简化控制:一旦配置完成,传感器可以独立工作,减少主控制器与传感器之间的通信需求。
稳定的测量频率:在自主模式下,传感器可以以固定的频率进行测量,从而确保数据的稳定性和连续性。
减少响应延迟:由于传感器持续地或定期地进行测量,数据可能会更快地准备好,从而减少了从请求到获取数据的延迟。
主控制器工作量减少:主控制器可以被释放出来执行其他任务,而不是持续地向传感器发送测量命令。
低功耗应用:对于某些传感器,自主模式可能更加能效,因为它可以在测量之间进入低功耗状态。
实现预定任务:自主模式允许传感器在特定条件下执行预定的任务,例如当检测到某个特定值时触发警报。
然而,是否使用自主模式取决于特定的应用需求。有些应用可能更倾向于连续模式,其中主控制器更频繁地与传感器交互,以获得实时数据或更高的控制精度。
视频教学
[https://www.bilibili.com/video/BV1Hz42127sb/]
样品申请
[https://www.wjx.top/vm/OhcKxJk.aspx#]
源码下载
[https://download.csdn.net/download/qq_24312945/89302046]
自主模式的优势
● 低功耗: VCSEL只在必要时开启,降低了功耗,非常适合需要长时间运行的电池供电设备。
● 独立运行: 不需要主机持续控制,降低了主机的处理负担。
● 灵活配置: 用户可以根据应用需求设置测距频率和积分时间,以适应不同的使用场景。
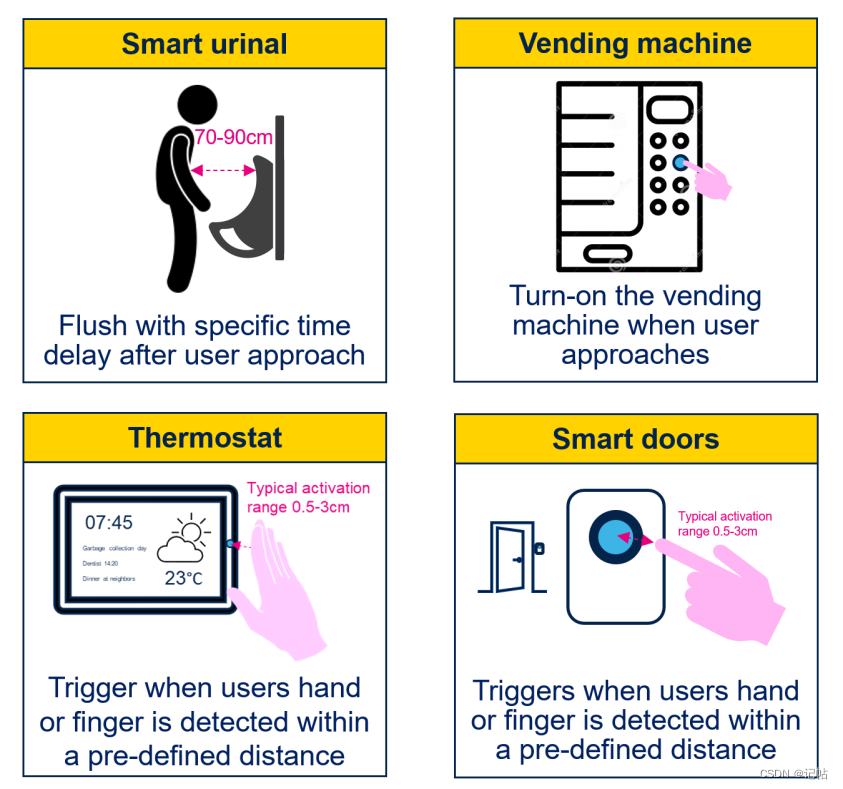
自主模式适用于需要低功耗运行且不需要主机持续监控的应用场景,例如智能家居中的用户检测、物体检测和手势识别等。
自主模式与连续模式区别
VL53L8CX 传感器的自主模式 (AUTONOMOUS) 和连续模式 (CONTINUOUS) 都允许连续的测量操作,但它们的工作方式和使用场景略有不同:
连续模式 (CONTINUOUS):
● 在此模式下,传感器连续进行测量,每次测量后,就会产生一个新的结果。
● 传感器会尽可能快地测量,基于所设置的时间预算。
● 主机通常需要周期性地从传感器中读取数据。
● 适用于需要高更新率或实时响应的应用。
自主模式 (AUTONOMOUS):
● 传感器独立地进行测量,而无需主机的常规干预。
● 主机可以进入低功耗休眠模式,而传感器仍然独立地执行测量。当传感器完成测量时,它可以通过中断唤醒主机,通知它读取数据。
● 这种模式特别适用于低功耗应用,因为大部分时间主机可以处于休眠状态。
● 这种模式可能与设置的测量频率或时间间隔一起使用,以确定传感器执行测量的频率。
总的来说,选择哪种模式取决于应用的需求。如果需要实时的高更新率数据,则连续模式可能更合适;而对于低功耗或不需要实时数据的应用,自主模式可能是更好的选择。
根据应用需求,如果需要低功耗且可以接受较低的测距频率,建议选择自主模式;如果需要高频率、实时的测距数据且不考虑功耗,建议选择连续模式。
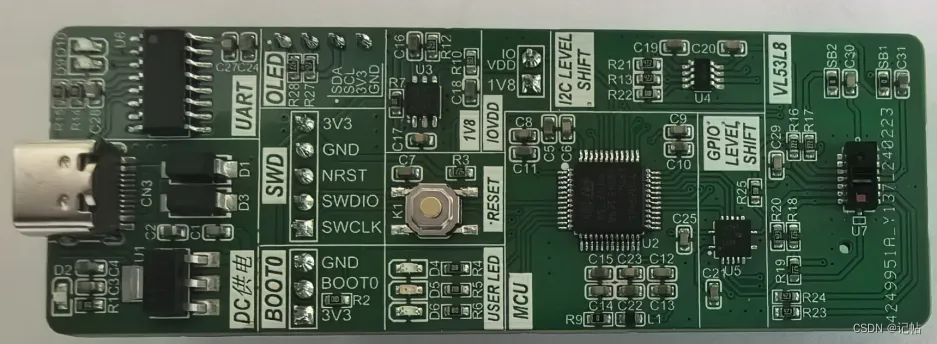
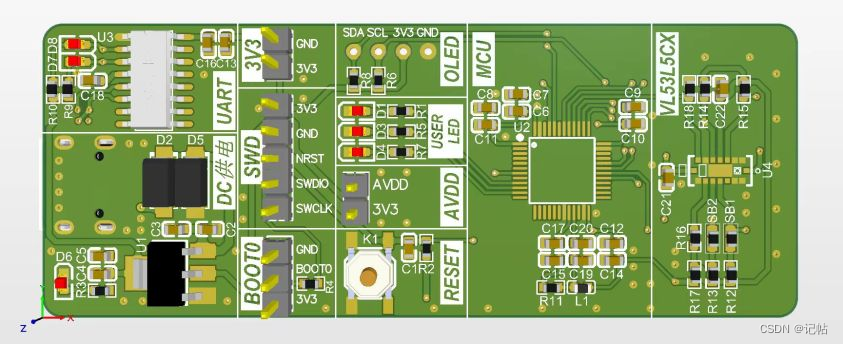
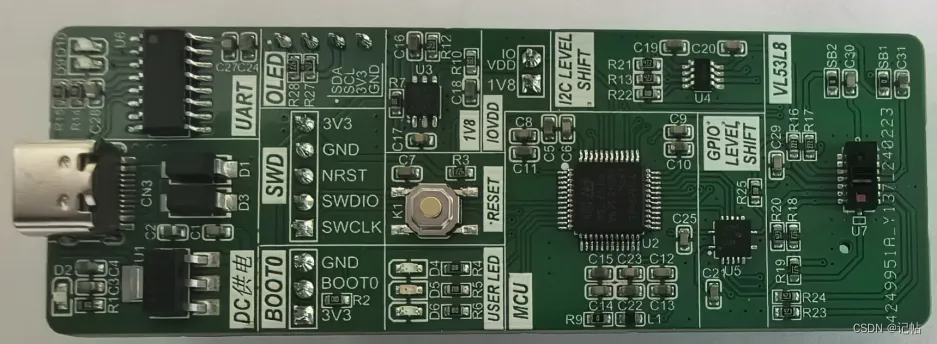
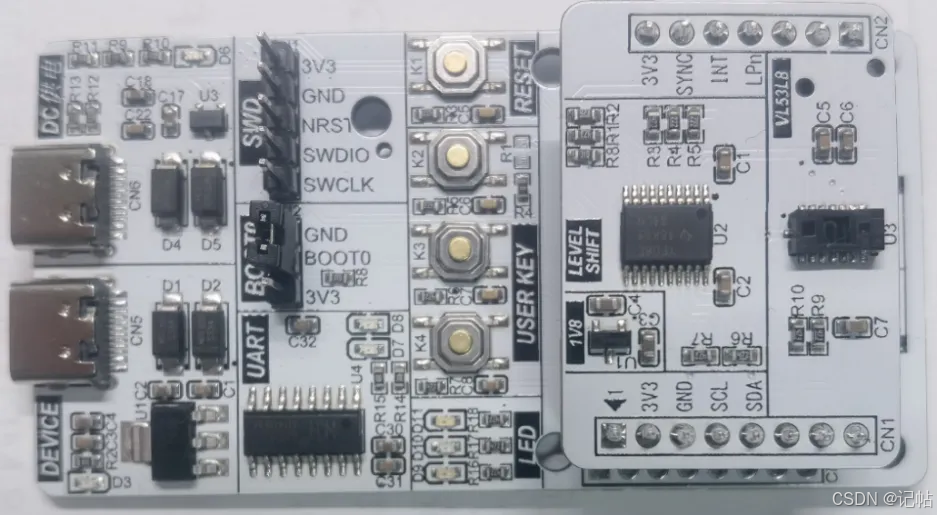
硬件准备
首先需要准备一个开发板,这里我准备的是自己绘制的开发板,需要的可以进行申请。 主控为STM32G431CB,TOF为VL53L8CX
生成STM32CUBEMX
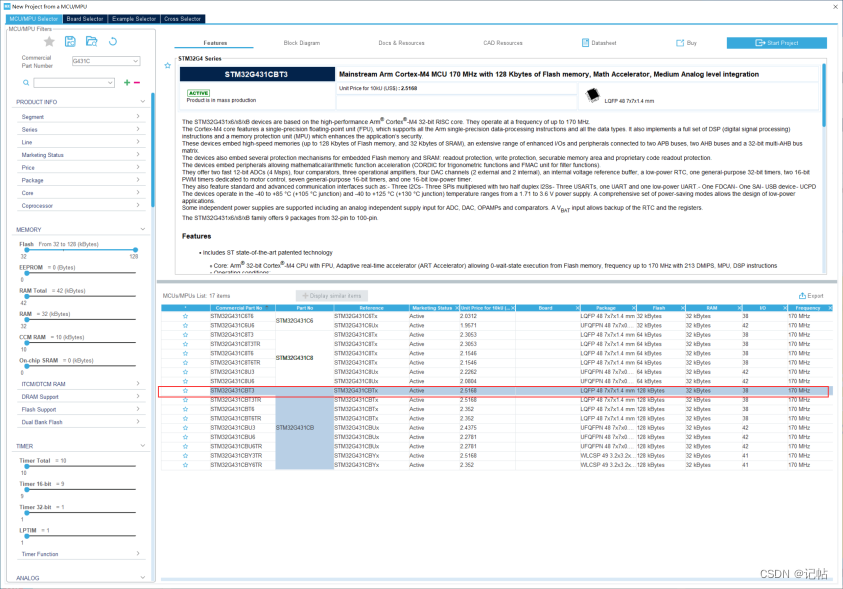
选择MCU
测试版所用的MCU为STM32G431CB。
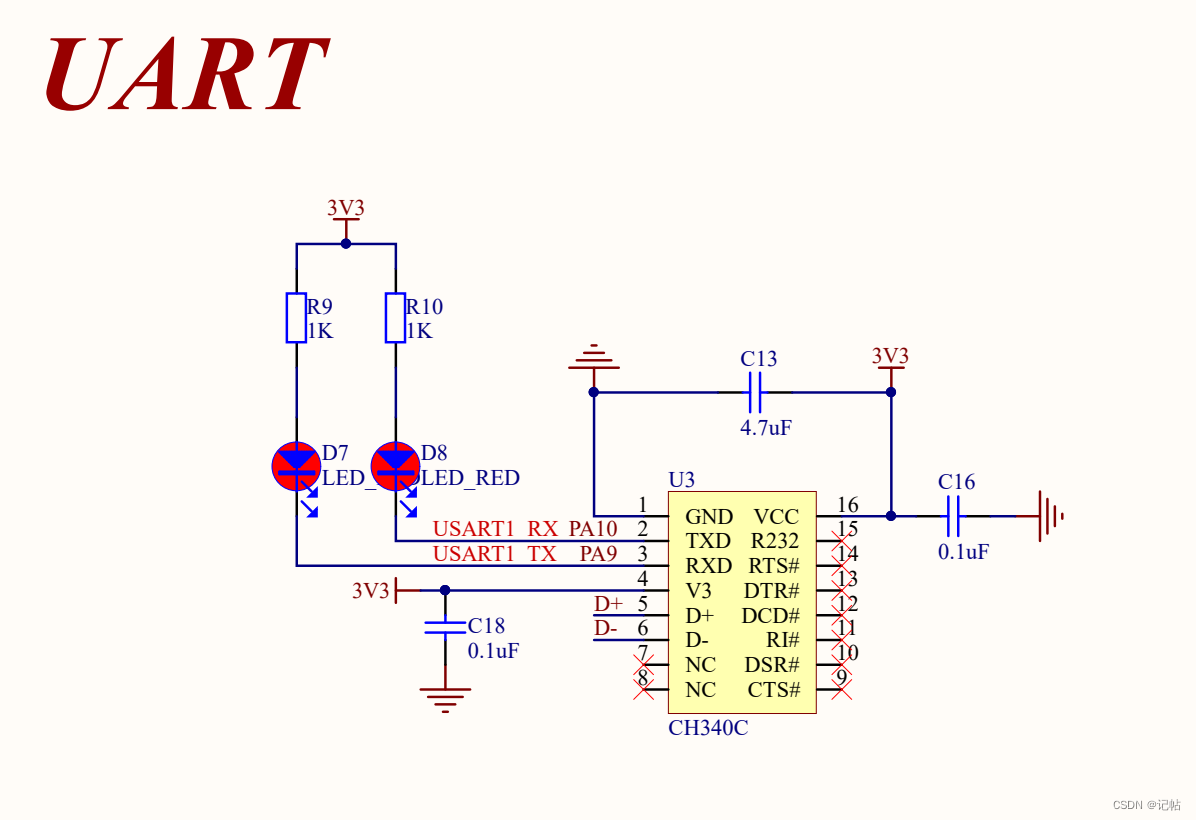
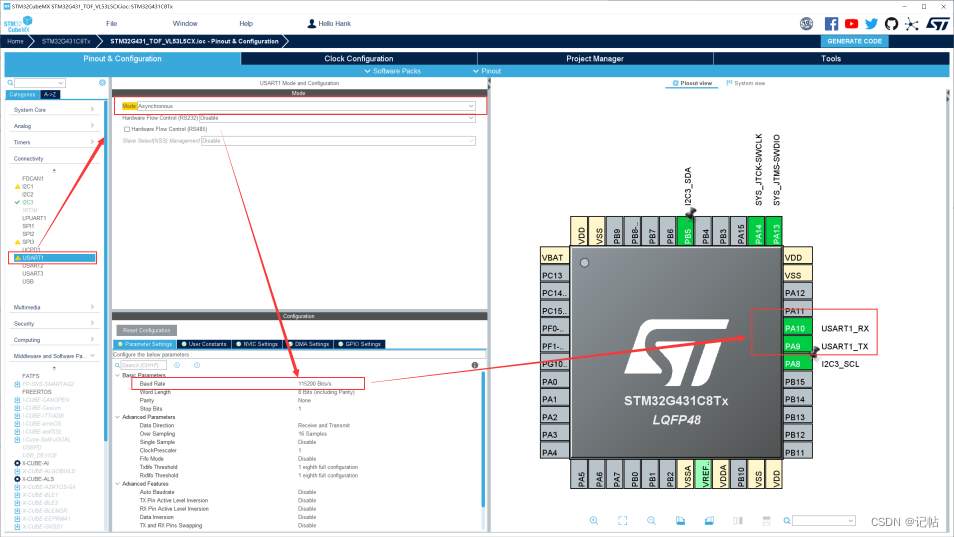
串口配置
查看原理图,PA9和PA10设置为开发板的串口。
配置串口。
IIC配置
在这个应用中,VL53L8CX模块通过I2C(IIC)接口与主控器通信。具体来说,VL53L8CX模块的I2C引脚连接到主控器的PA8和PB5两个IO口。


配置IIC为快速模式,速度为400k。

LPn 设置
若进行IIC通讯,LPn设置为高电平状态。

这里对应管脚为PA12。

配置为PA12。

INT设置
自主模式可以通过获取INT管脚进行判断数据是否准备好。

配置PA11为输入模式。

X-CUBE-TOF1
本节介绍在不需要使用样例应用时如何使用STM32CubeMX将X-CUBE-TOF1软件包添加到项目中。有了这样的设置,就只配置了驱动层。

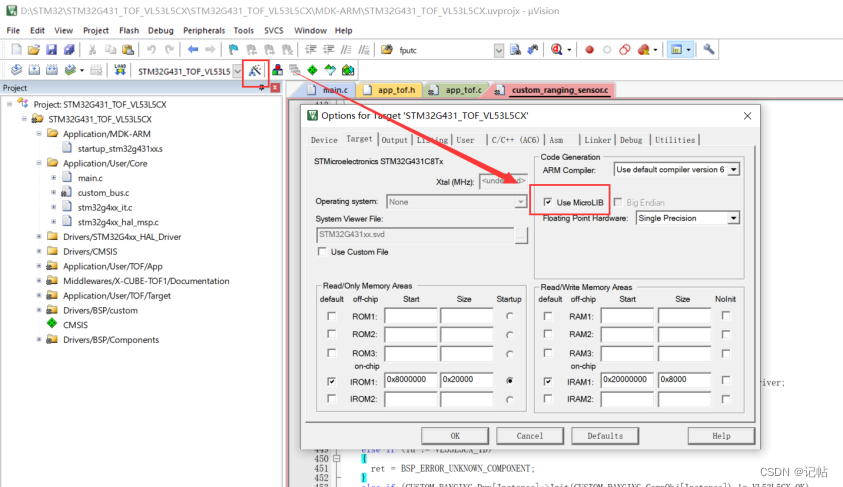
串口重定向
打开魔术棒,勾选MicroLIB
在main.c中,添加头文件,若不添加会出现 identifier "FILE" is undefined报错。
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
函数声明和串口重定向:
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f){
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END PFP */
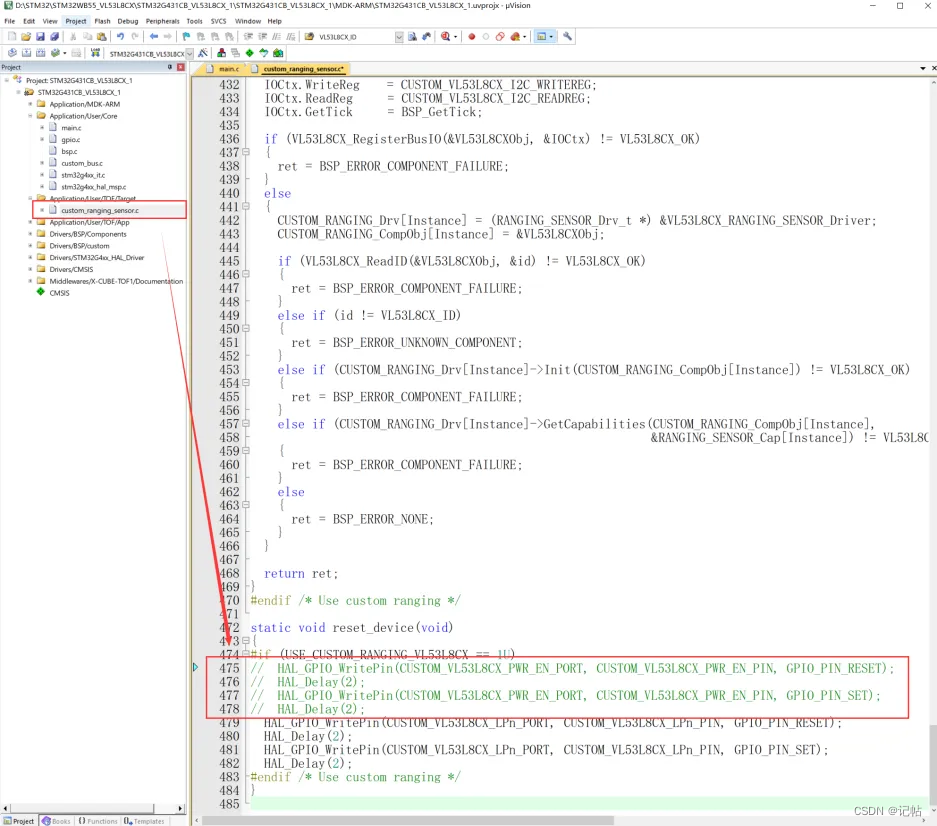
代码配置
在custom_ranging_sensor.c代码中,有IO口驱动VL53L8CX进行复位的代码,由于没有配置对应的IO,所以需要注释掉。
TOF代码配置
在main.c中添加刷新速率,500ms刷新一次,所以频率为2Hz。
/* USER CODE BEGIN Includes */
#include "stdio.h"
#include "custom_ranging_sensor.h"
#define TIMING_BUDGET (500U) /* 5 ms < TimingBudget < 1000 ms */
#define RANGING_FREQUENCY (2U) /* Ranging frequency Hz (shall be consistent with TimingBudget value) */
#define POLLING_PERIOD (1000U/RANGING_FREQUENCY) /* refresh rate for polling mode (milliseconds) */
/* USER CODE END Includes */
函数与变量定义:
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f){
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
static uint8_t map_target_status(uint8_t status);
//将从VL53L8CX传感器获取的数据转换
static int32_t convert_data_format(VL53L8CX_Object_t *pObj,VL53L8CX_ResultsData *data, RANGING_SENSOR_Result_t *pResult);
//打印数据
static void print_result(RANGING_SENSOR_Result_t *Result);
static RANGING_SENSOR_ProfileConfig_t Profile;
static int32_t status = 0;
static RANGING_SENSOR_Result_t Result;
/* USER CODE END PFP */
添加TOF初始化。 若需要为8*8,修改对应vl53l8cx_set_resolution参数即可。 其中vl53l8cx_set_integration_time_ms和vl53l8cx_set_ranging_frequency_hz加载了对应的刷新速率。
/* USER CODE BEGIN 2 */
/*********************************/
/* Set ranging mode autonomous */
/*********************************/
VL53L8CX_Object_t *pL8obj = CUSTOM_RANGING_CompObj[CUSTOM_VL53L8CX];
static VL53L8CX_ResultsData data;
uint8_t NewDataReady = 0;
// 设置测距的配置文件为 4x4 的自主测量模式
Profile.RangingProfile = RS_PROFILE_4x4_AUTONOMOUS;
// 设置测量的时间预算,这通常决定了测量的速度和准确度
Profile.TimingBudget = TIMING_BUDGET; /* 5 ms < TimingBudget < 1000 ms */
// 设置测量的频率,这决定了传感器执行测量的速率
Profile.Frequency = RANGING_FREQUENCY; /* Ranging frequency Hz (shall be consistent with TimingBudget value) */
// 确定是否启用环境光测量,0为禁用,1为启用
Profile.EnableAmbient = 0; /* Enable: 1, Disable: 0 */
// 确定是否启用信号测量,0为禁用,1为启用
Profile.EnableSignal = 0; /* Enable: 1, Disable: 0 */
pL8obj- >IsAmbientEnabled = Profile.EnableAmbient;
pL8obj- >IsSignalEnabled = Profile.EnableSignal;
/*
use case VL53L8CX_PROFILE_4x4_CONTINUOUS:
*/
// 设置传感器的测量分辨率为 4x4
status = vl53l8cx_set_resolution(&(pL8obj- >Dev), VL53L8CX_RESOLUTION_4X4);
// 设置传感器的测量模式为自主模式
status |= vl53l8cx_set_ranging_mode(&(pL8obj- >Dev), VL53L8CX_RANGING_MODE_AUTONOMOUS);
// 设置传感器的集成时间,这通常关联到测量的时间预算
status |= vl53l8cx_set_integration_time_ms(&(pL8obj- >Dev), TIMING_BUDGET);
// 设置传感器的测量频率,决定了传感器执行测量的速率
status |= vl53l8cx_set_ranging_frequency_hz(&(pL8obj- >Dev), RANGING_FREQUENCY);
if (status != VL53L8CX_STATUS_OK)
{
printf("ERROR : Configuration programming error!nn");
while (1);
}
status = vl53l8cx_start_ranging(&(pL8obj- >Dev));
if (status != VL53L8CX_STATUS_OK)
{
printf("vl53l8cx_start_ranging failedn");
while (1);
}
/* USER CODE END 2 */
积分时间/曝光时间(Integration time)

积分时间是一项仅在使用自主测距模式时可用的功能(请参阅第 4.5 节测距模式)。 它允许用户在启用 VCSEL 时更改时间。 如果测距模式设置为连续,则更改积分时间无效。 默认积分时间设置为 5 ms。
对于 4x4 和 8x8 分辨率,积分时间的影响是不同的。 分辨率 4x4 由一个积分时间组成,8x8 分辨率由四个积分时间组成。 下图表示两种分辨率的 VCSEL 发射。

所有积分时间之和 + 1 ms 开销必须低于测量周期,否则测距周期将自动增加。
主程序
主程序来获取对应的INT位状态来判定数据是否准备好。
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* polling mode */
if(HAL_GPIO_ReadPin ( GPIOA, GPIO_PIN_11) ==0)
{
do {
(void)vl53l8cx_check_data_ready(&(pL8obj- >Dev), &NewDataReady);
} while (!NewDataReady);
if (NewDataReady != 0)
{
status = vl53l8cx_get_ranging_data(&(pL8obj- >Dev), &data);
if (status == VL53L8CX_STATUS_OK)
{
/*
Convert the data format to Result format.
Note that you can print directly from data format
*/
if (convert_data_format(pL8obj, &data, &Result) < 0)
{
printf("convert_data_format failedn");
while (1);
}
print_result(&Result);
}
}
}
/* USER CODE END WHILE */
// MX_TOF_Process();
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
演示结果
当分辨率为4*4时候,需要积分1次,设置的积分时间为500ms,那么对应的频率应该是2Hz。

当分辨率为8*8时候,需要积分4次,设置的积分时间为500ms,那么对应的频率应该是0.5Hz。

配置完成侯可以在Tera Term下查看结果,如下是8*8的显示。

审核编辑 黄宇
-
传感器
+关注
关注
2579文章
55926浏览量
796055 -
TOF
+关注
关注
9文章
561浏览量
38763 -
主控制器
+关注
关注
2文章
31浏览量
11273
发布评论请先 登录
VL53L5CX驱动开发(2)----设置自主模式
VL53L8CX TOF开发(1)----驱动TOF进行区域检测
VL53L8CX TOF开发(4)----运动指示器
VL53L8CX TOF开发(5)----运动阈值检测
VL53L8CX小板开发(4)----运动指示器

使用VL53L3如何在API中使用自主模式阈值?
VL53L8CX TOF开发(3)----检测阈值
基于ST VL53L8CX ToF传感器的技术解析与应用设计

VL53L8CX小板开发(1)----驱动TOF进行区域检测
VL53L8CX小板开发(3)----检测阈值
VL53L8CX小板开发(5)----运动阈值检测

STM32H5开发VL53L8CX(1)----驱动TOF进行区域检测
STM32H5开发VL53L8CX(2)----设置自主模式

STM32H5开发VL53L8CX(3)----检测阈值

STM32H5开发VL53L8CX(5)----运动阈值检测




评论