 3D纳米制造的软体微型机器人,超灵敏弹簧作为板载传感器和执行器
3D纳米制造的软体微型机器人,超灵敏弹簧作为板载传感器和执行器

微尺度生物和特定的活动细胞利用基于蛋白质的弹簧状响应结构来感知、抓取和移动。在人造微机械上实现这种生物机械传导功能,以用于单细胞操作具有挑战性,这是由于需要一种生物适用的纳米尺度弹簧系统,并对皮牛顿级别(piconewton-scale)的力具有足够大且可编程的应变响应。
据麦姆斯咨询报道,近日,中国科学院深圳先进技术研究院、德国开姆尼茨工业大学(Chemnitz University of Technology)、德累斯顿工业大学(Dresden University of Technology)等机构的研究人员组成的团队在Nature Nanotechnology 期刊上发表了题为“3D nanofabricated soft microrobots with super-compliant picoforce springs as onboard sensors and actuators”的论文,提出了一种具有皮牛级力灵敏度的超顺应性纳米结构弹簧系统(皮牛级弹簧),可通过3D纳米加工技术集成到单细胞尺度的功能性软体微机械中。研究人员展示了这些皮牛级弹簧组件作为能量转换机制的有效设计可编程性,可用于集成构建定制的软体微机械,并在单细胞尺度上具有板载传感和执行功能,可用于微型机器人的抓取和运动。将有源软体弹簧集成到3D纳米制造中,为创建与生物实体无干扰交互的生物相容性软体微型机器人提供了一条途径。
该皮牛级弹簧组件是通过弹性体光刻胶复合物的光交联制造的(图1a)。光刻胶包含一种提供弹性的弹性体、一种提供生物相容性和与水溶液氢键亲和力的水凝胶,以及嵌入的提供磁化的约20 nm的超顺磁纳米颗粒(MNP)。图1b显示了所制造的皮牛级弹簧示例的高分辨率3D重建图像。具有悬臂形、弧形、螺旋形和锯齿形等各种几何形状的皮牛级弹簧组件可进行3D纳米制造,以满足不同软体微机械的顺应性和复杂性要求,从而感知和施加皮牛级的力(图1c和1d)。
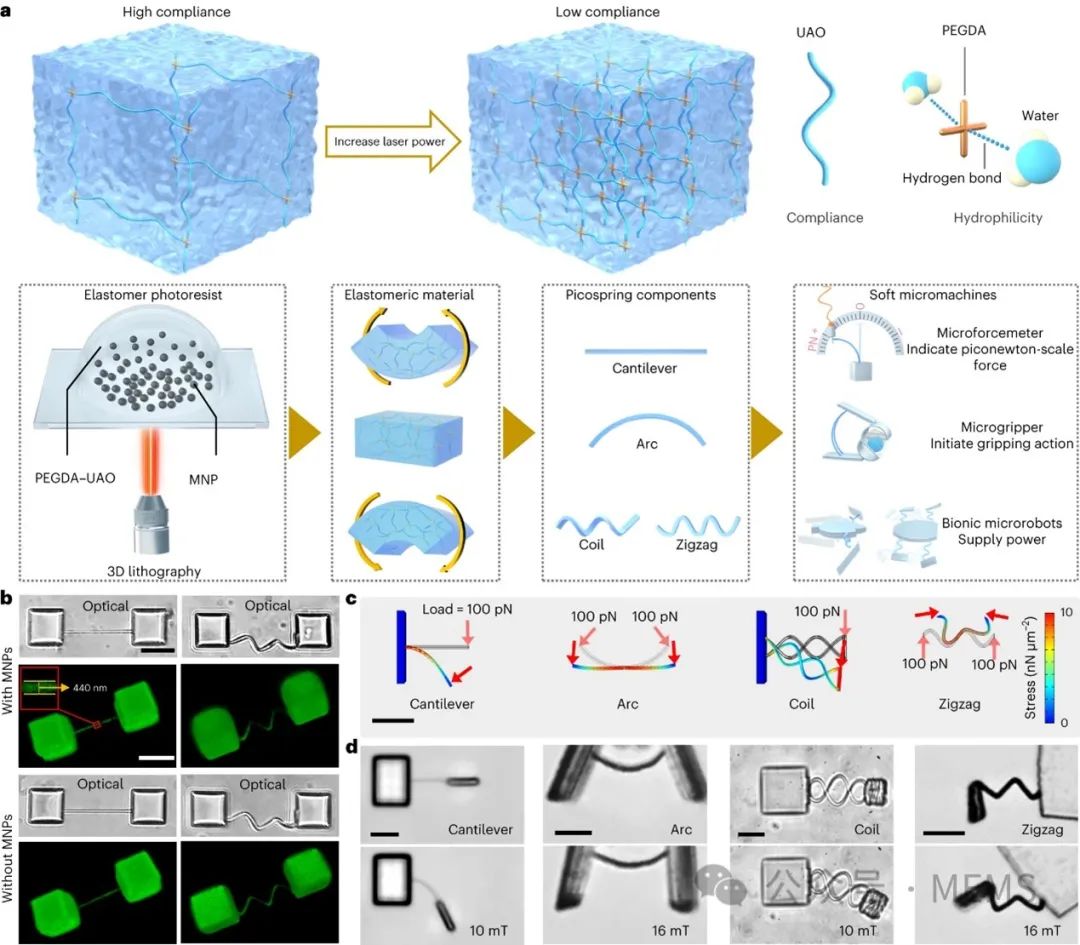
图1 具有可编程弹性分布的基于皮牛级弹簧的微机械的制造
研究人员利用光学阱基于经典悬臂梁法表征材料的弹性(图2a和2b)。在相同的捕获功率下,以较低激光功率制造的悬臂梁呈现出较高的偏转。如图2c所示,当激光功率从5.00 mW增加到6.25 mW时,弹性材料的杨氏模量已经增加了5倍以上,并在增加到25 mW时其值增加了200倍以上,这使得通过局部编程激光功率对皮牛级弹簧材料的弹性进行宽范围编程成为可能。
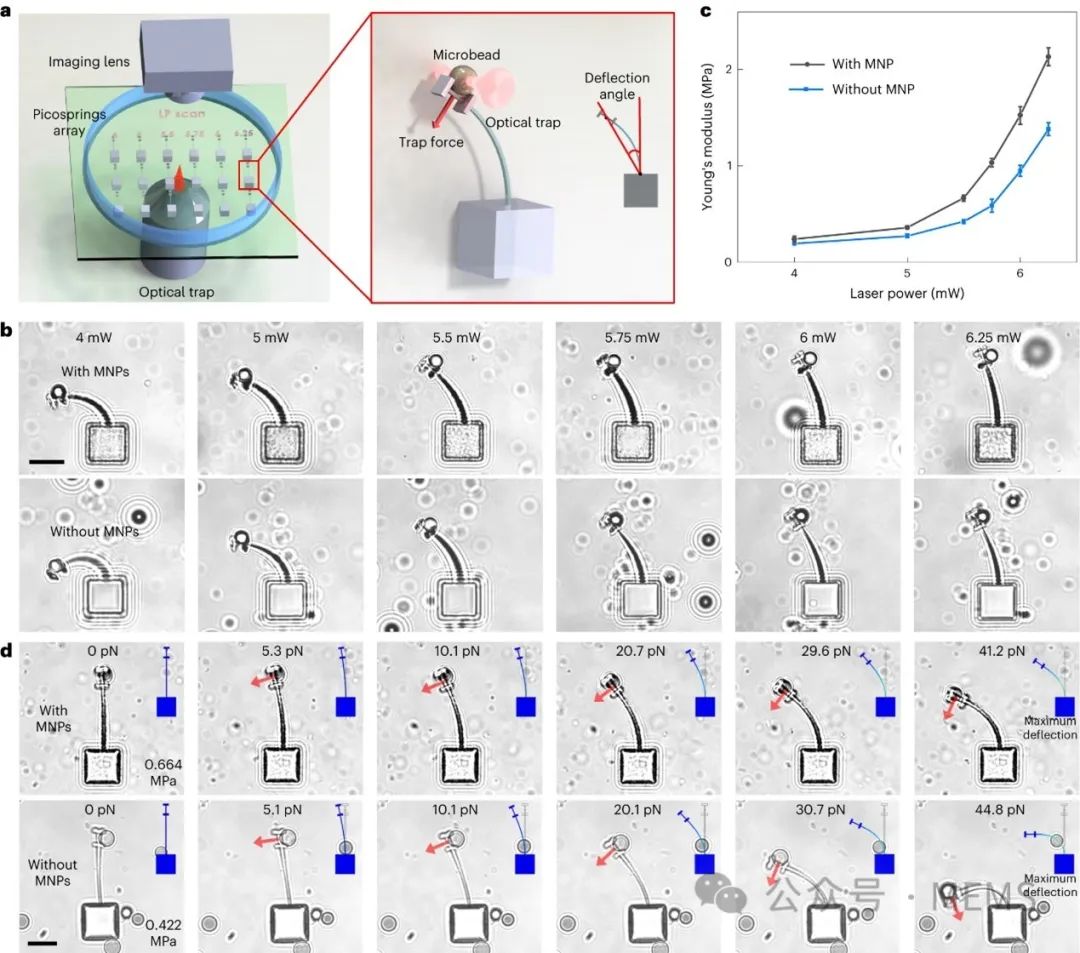
图2 基于悬臂梁方法的皮牛级弹簧材料的力学表征
得益于其力指示器功能,皮牛级弹簧还可以提供轻柔的力,并可根据其变形程度进行调节,以启动复杂的机械动作。研究人员展示了一种长度为40 μm的磁性微夹具,它使用皮牛级弹簧作为弹性自闭合末端执行器进行单细胞操作,如图3a和3b所示。其皮牛级弹簧采用弧形,可在有限的长度内获得更高的角偏转。在高磁场(例如16 mT)下,磁扭矩将磁性微夹具指状物的易磁轴与磁场方向对齐,从而打开微夹具。当磁场减弱时,它逐渐关闭。
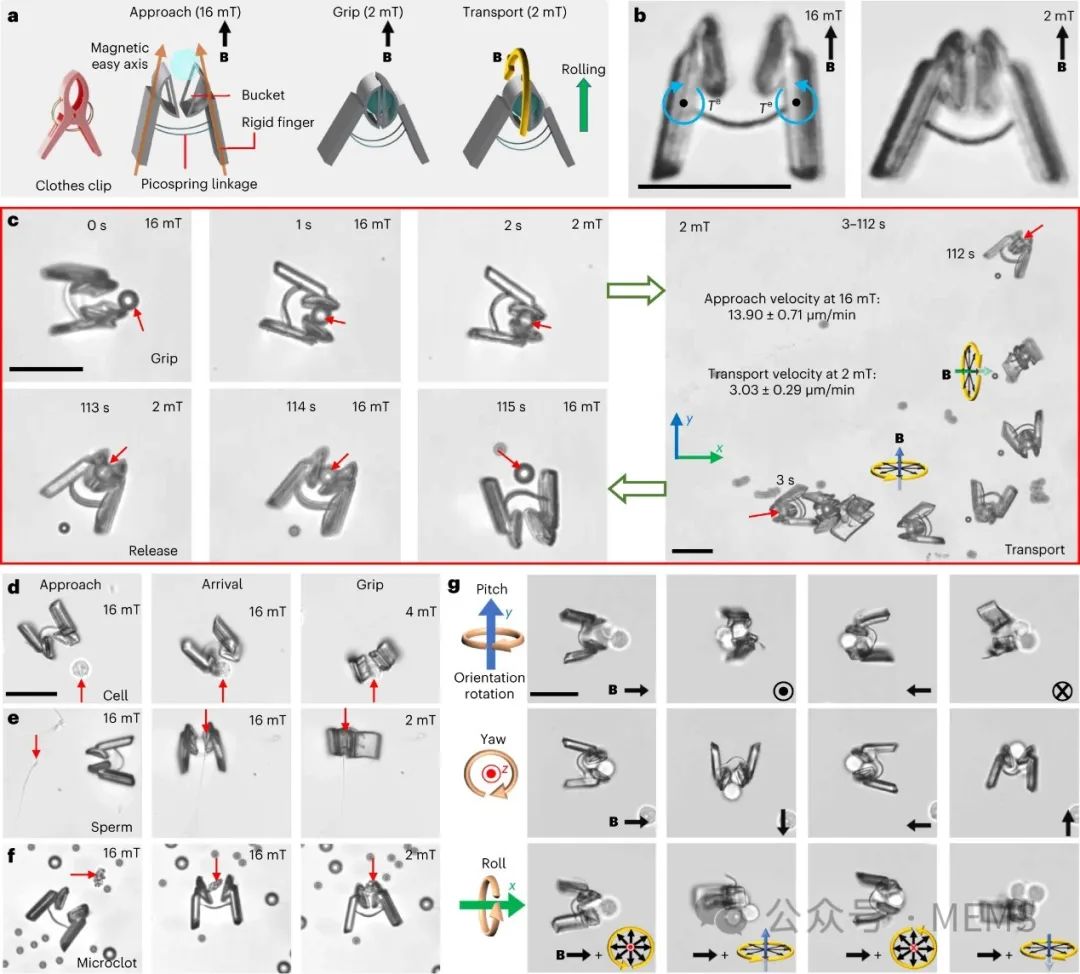
图3 用于启动对细胞物体抓取动作的超顺应性皮牛级弹簧
与传统的弹簧相似,本研究提出的皮牛级弹簧也可以通过编程释放存储的能量来为机器提供动力。图4a显示的是微振荡器阵列的驱动。如图4b所示,磁弹性材料使人们能够构建具有板载执行机构的复杂的基于皮牛级弹簧的微型机器人,例如,带有螺旋形弹簧的全磁性“微型企鹅”(长度为20 μm)和带有锯齿形皮牛级弹簧的部分磁性“微型龟”(长度为50 μm)。这些微型机器人被设计为利用其可移动磁性部件作为受外部磁场驱动的弹簧卷绕器。图4c、4f分别显示了微型企鹅和微型龟的变形模式。
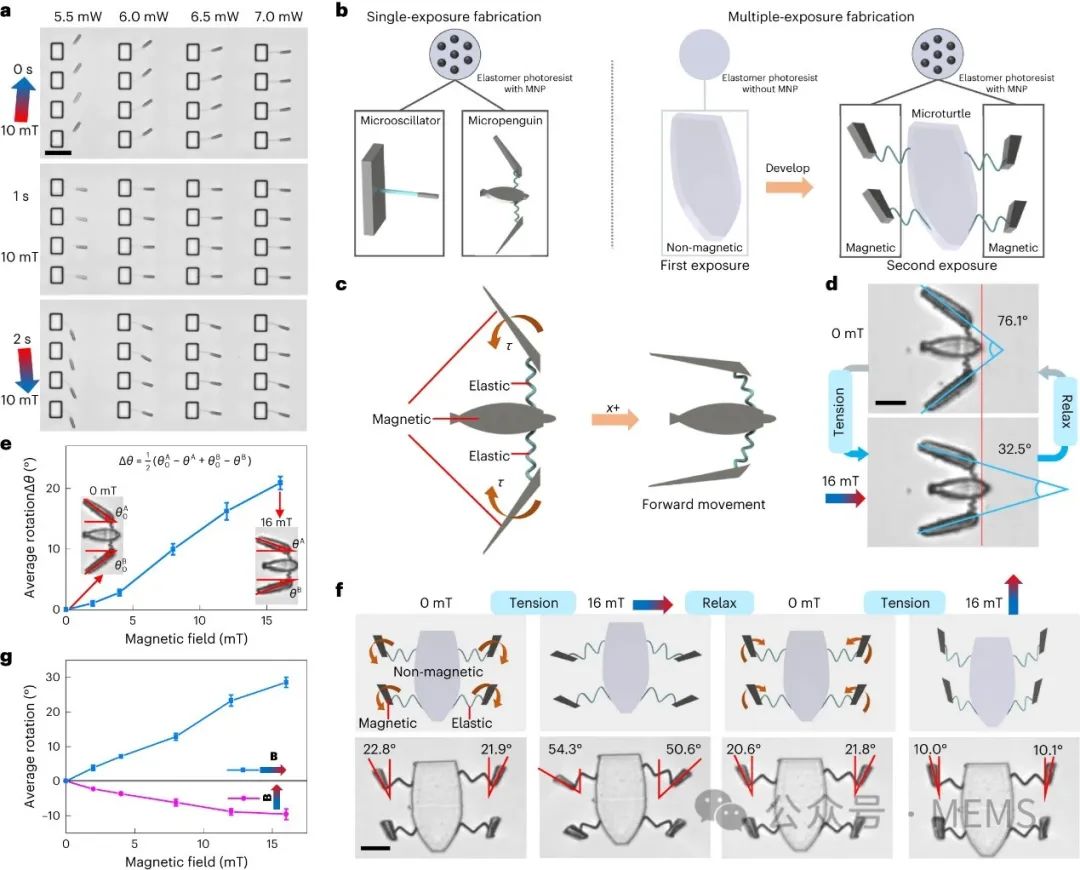
图4 驱动微型机器人的超顺应性皮牛级弹簧
皮牛级弹簧系统通过将磁势能稳定地转换为动能来抵消流体耗散,从而成为软体微型机器人的板载执行器。图5a说明了用于控制微型企鹅的方向切换策略。作为一种软体执行器,皮牛级弹簧还可以通过仅进行二维形态变换来实现微型机器人的运动,而无需平面外运动。图5c和5d显示了一种用于控制部分磁性微型龟的顺序运动策略。
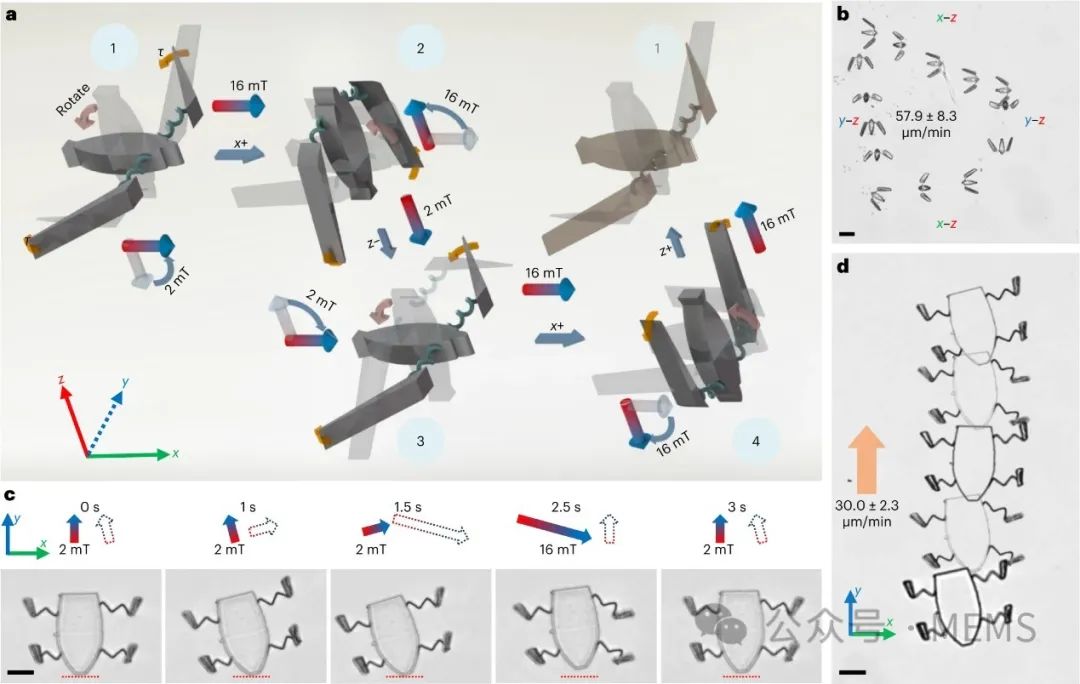
图5 基于皮牛级弹簧的微型机器人的运动
综上所述,这项研究展示了具有可编程弹性分布的基于皮牛级弹簧的软体微型机器人的3D纳米制造。皮牛级弹簧可实现微米级的变形,可直接用于控制生物条件下单细胞尺度的微机械的复杂动作。不同配置的皮牛级弹簧可以处理不同的任务。利用皮牛级弹簧变形与其输出弹性力之间的相关性,研究人员开发了一种用于操纵单细胞的具有可调节夹持力的纯机械微夹具。除了对抓取动作的开关控制之外,皮牛级弹簧系统还能够为不受束缚的微型机器人持续提供动力。所提出的皮牛级弹簧具有超低力变形,有望用于构建片上AFM、微加速器和微生物活检镊等新型柔性微机械。
论文链接:
https://doi.org/10.1038/s41565-023-01567-0
-
传感器
+关注
关注
2577文章
55499浏览量
793896 -
3D
+关注
关注
9文章
3022浏览量
115561 -
微型机器人
+关注
关注
0文章
112浏览量
20231
原文标题:3D纳米制造的软体微型机器人,超灵敏弹簧作为板载传感器和执行器
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
MEMS传感器光学3D轮廓测量-3D白光干涉仪
安森美传感器芯片创新突破机器人感知边界
迈来芯3D磁传感推动机器人舵机技术升级

中国科学院研发3D手型微纳机器人
人形机器人传感器产业链最新分析:力、触觉、IMU、视觉传感器为主流!(全面)

机器人领域中的温度传感器技术及其应用:机器人温度监测,提升机器人工作稳定性

传感器和执行器之间有什么关系?
3D传感器技术助力工业变革,解锁制造与物流新可能

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
南京理工大学:研发柔性机械传感器表界面微结构-面向软体机器人
工业机器人的特点
高压放大器在软体机器人研究中的应用

纳芯微磁传感器技术推动人形机器人性能提升




评论