 如何在S7-200 SMART CPU断电重启后保持运动控制的当前位置值?
如何在S7-200 SMART CPU断电重启后保持运动控制的当前位置值?

S7-200 SMART 断电重启后由于初始化指令的执行,当前位置会复位为0。要使S7-200 SMART运动控制的当前位置值在CPU断电重启后依然保持,可以通过以下的编程来实现。
在此以通过向导生成的运动控制 “ 轴 0 ” 为例来说明如何在 S7-200 SMART CPU 断电后保持 “ 轴 0 ” 的当前位置值,具体可参考以下三个部分的编程来实现 :
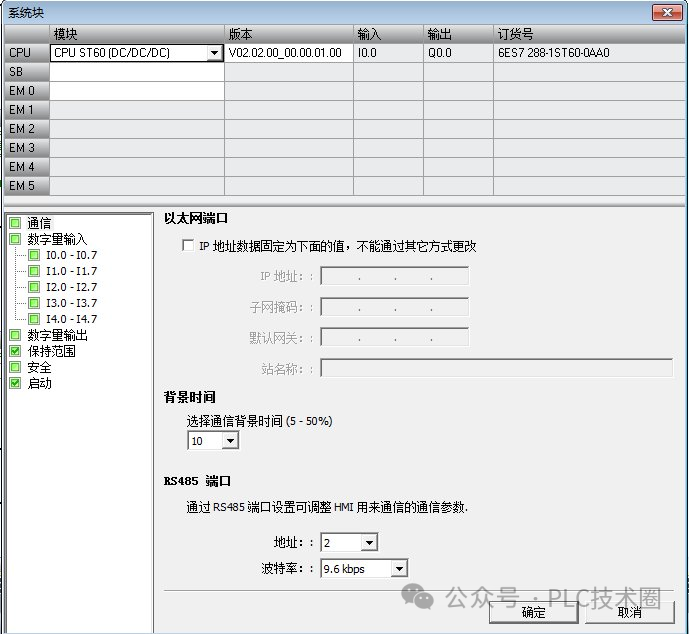
1,设置两个个断电保持区域:VD1000、VD1004,如图所示:
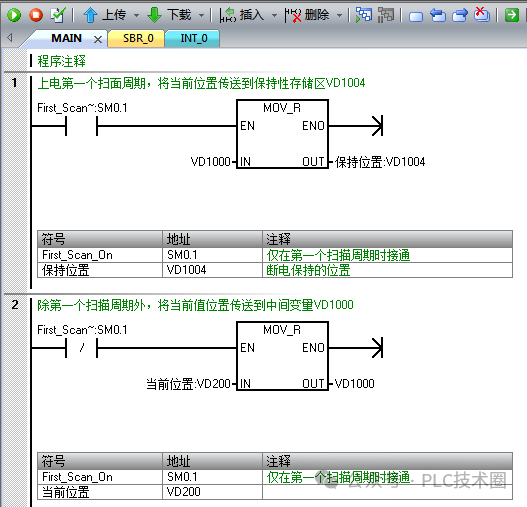
2,将当前值位置值在第一个扫面周期内传送到保持位置VD1004内,如图所示:
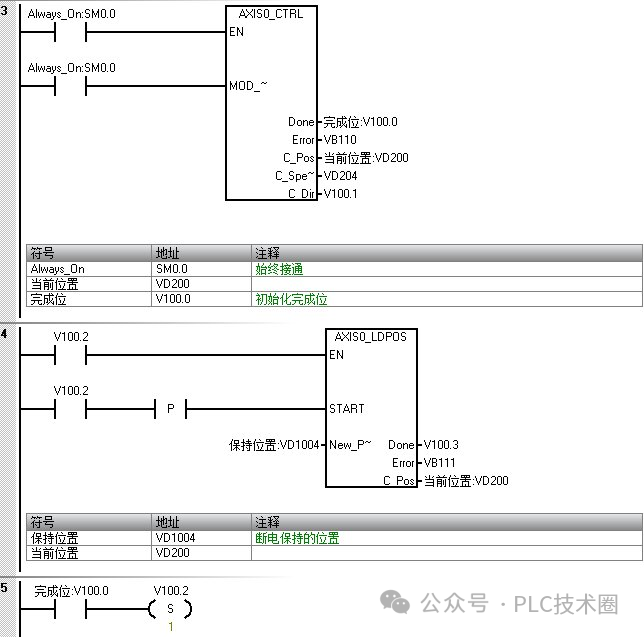
3,当初始化完成后,用初始化指令 “ AXIS0_CTRL ” 的DONE位来触发修改位置指令 “ AXIS0_CTRL ”,将保持位置VD1000装载到当前位置VD200,如图所示:
本例程仅供参考,程序中的CPU版本、类型可能与用户实际使用不同,用户可能需要先对例子程序做修改和调整,才能将其用于测试
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
SMART
+关注
关注
3文章
246浏览量
46517 -
运动控制
+关注
关注
5文章
840浏览量
34681 -
S7-200
+关注
关注
13文章
412浏览量
52985
发布评论请先 登录
相关推荐
热点推荐
S7-200 SMART 通信端口以及连接方式
每个S7-200 SMART CPU都提供一个以太网端口和一个RS485端口(端口0),标准型CPU额外支持SB CM01信号板(端口1),信号板可通过STEP
S7-200SMART与S7-200的区别是什么
机型丰富,更多选择 S7-200 SMART PLC提供不同类型、I/O点数丰富的CPU模块,单体I/O点数最高可达60点,可满足大部分小型自动化设备的控制需求。另外,
发表于 12-04 16:21
详细介绍S7-200 SMART运动向导的组态
S7-200 SMART作为S7-200的升级款,在很多方面都进行了优化,使用更加的方便。其中运动控制的优化最为突出,
S7-200 SMART可实现CPU和HMI之间的多种通信
S7-200 SMART 使用的软件: STEP7-Micro/WIN SMART 提供了一个用户友好的环境,供用户开发、编辑和监视控制应用
S7-200 SMART CPU固件更新V2.7
S7-200 SMART 晶体管输出类型 CPU 模块本体最多提供三轴 100 KHz 高速脉冲输出,通过强大灵活的设置向导可组态为 PWM 输出或运动
S7-200 SMART使用运动控制面板进行调试
为了帮助用户更好的开发 S7-200 SMART 的运动控制功能, STEP-7 Micro/WIN S
S7-200 SMART如何下载程序?
S7-200 SMART CPU 可以通过以太网电缆与安装有STEP7 Micro/WIN SMART 的编程设备进行通信连接。
S7-1200 CPU与S7-200 SMART S7通信
S7-200 SMART CPU 固件版本 V2.0 及其以上,本体集成的 PROFINET 通信接口支持 S7 通信
发表于 05-06 14:49
•2095次阅读

S7-1500与S7-200 SMART的PROFINET IO通信配置
从 S7-200 SMART V2.5 版本开始,S7-200 SMART 开始支持做 PROFINET IO 通信的智能设备。作为智能设备,S7-

SIMATIC S7-200 SMART系统手册
S7-200 SMART 系列包括许多微型可编程逻辑控制器 (Micro PLC, Micro Programmable Logic Controller),这些控制器可以
发表于 08-28 15:54
•5次下载



评论