 水下无人航行器的研究现状与展望
水下无人航行器的研究现状与展望

近年来,随着新能源等各项新兴科学技术的发展,对海洋工程和海洋军事等的发展需求也变得日益强烈。对海洋的开发和利用的前提是认识海洋,认识海洋就必须对海洋进行调查研究。
对海洋环境的调查主要包括军用和民用两部分。军用调查主要是与反水雷、反鱼雷、反水下侦听等军用相关的调查;民用调查主要是与海洋科考、海洋资源勘探和利用、海底光缆和管线等民用相关的调查。军用和民用海洋声学调查都是通过声纳等设备对水下环境进行成像以及后继的数学分析处理来完成的。然而,一个独立的声纳系统无论如何是不可能完成海洋调查任务的,它必须被搭载在一个载体上,在载体的帮助下才可能完成调查任务。
常见的搭载平台经历了从水面舰船到载人潜器(HOV)到水下无人航行器(UUV)的历程。HOV和UUV的研究分别起步于1890年和1960年左右。它们具有活动范围大、机动性强和作业效率高等优点。近年来,随着深远海海洋调查的需求,HOV和UUV扮演着越来越重要的角色。
UUV又分为遥控潜器(ROV)和自主式潜器(AUV)。AUV具备不依赖母船供电、摆脱了ROV中光缆/电缆等的束缚,以无人自主控制为主要控制方式等优点下环境的复杂性,ROV由于有人的参与,执行任务相比AUV更加灵活便捷。
以上就是UUV研究的背景介绍。接下来,本文将对UUV的分类、发展历史、知名的研究机构、典型产品概况、国内研究现状、未来发展方向等进行详细论述。最后,对全文进行了总结。本文的论述侧重UUV中最重要的两类:AUV和ROV。
一、分类、发展历史与典型产品概述
⒈无人航行器的分类
每类UUV都有一种或数种特定的用途。对不同的用途,UUV的设计和技术指标都有一定的针对性。UUV按体积可分为便携型、轻型、重型和巨型几大类。各类UUV的相关基本技术指标见表1。其中,便携型和轻型主要用于港口、航道和近海浅海的防务与调查等等。重型和巨型由于航程大和载重量大等优点可以用于远海深海的调查等。
表1 按体积分类的各类UUV的基本技术指标
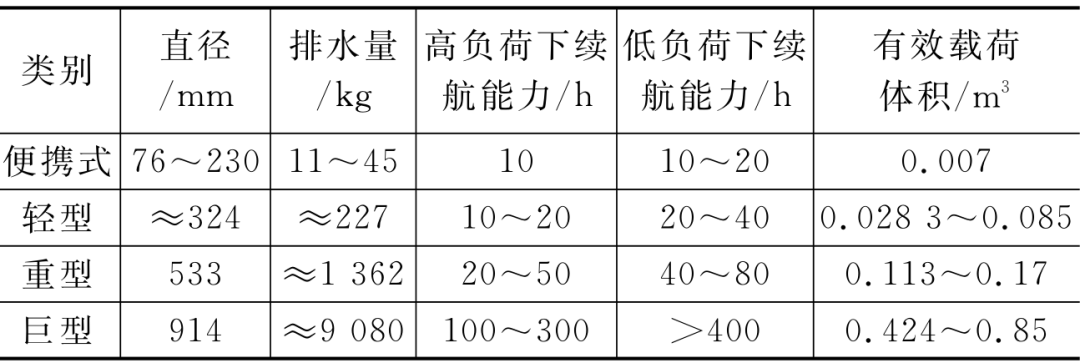
对于用作海洋声学调查的UUV,要求其具有较高的姿态角、姿态角速度、位置、航速等控制精度,并且还要兼顾稳定性与机动性。同时,还要求该类UUV对各类声学设备有较强的搭载能力,较强的声学图像处理和后处理能力,一定的目标自主判读能力和高速大宽带通信能力等等。
ROV在UUV中属于比较特殊的一类,下面重点介绍ROV系统的组成和分类。ROV系统主要包括水面和水下两个主体单元。水面单元包括绞车和集控操作台(一般为一个集装箱),水下单元就是ROV机器人。水面单元与水下单元通过电缆或光缆连接,水面部分可以向ROV发送控制指令、导航定位信息等。而ROV可以向水面单元反馈自身状态、水下探测的图像信息等。由于ROV可以接收水面单元发送的导航定位信息,所以ROV通常搭载低成本的微机光电(MEMS)惯性导航装置,而AUV由于没有水面单元进行辅助导航,一般搭载高精度的光纤或激光惯性导航装置。ROV系统由于有人参与控制、通信与水下图像判别等,所以可以执行更加复杂、艰巨的水下作业任务。这是相比AUV的一个较明显的优势。当然,相对AUV的劣势就是活动范围受缆长等因素的限制。
ROV可以分为3种形式:底部爬行式、中水层浮游式以及混合式。
⑴底部爬行式:只能在海底作爬行,它的设计总是为某一个特定的工作而设计的,而不是为一个笼统的目的,早期主要用来进行海底挖沟,用于掩埋管道、电缆等。
⑵中层浮游式:可通过电缆给潜水器提供动力及控制信号,潜水器只能在水中进行前后左右上下运动,同时可以向左或向右旋转,这种ROV作业任务广泛。
⑶混合式:这种系统仍然是靠水面提供能源并提供控制,推动力是从轮子、轨道或者拖拉撞击某一个结构来获取的。
⒉发展历史与典型产品概述
1957年,第1台真正意义的AUV-SPURV在美国华盛顿大学发明。UUV技术比较先进的国家包括美国、加拿大、挪威、英国、法国、德国、俄罗斯和日本等。美国的UUV主要包括先进无人搜索系统(AUSS),曼塔(Manta)航行器、Remus6000等系列航行器、蓝鳍金枪鱼(Bluefin)系列航行器、MK30潜艇模拟器、Odyssey、Cayibou、遥控环境测量装置、战场准备自主式水下航行器、近期水雷侦察系统、远期水雷侦察系统和任务重组式航行器等等。美国配套的UUV试验平台有21UUV、大直径UUV(LDUUV)和STDV等等。
AUSS是美国海军空海战系统中心(SPAWAR)研制的高级水下搜索系统,它首次彻底摒弃了典型的长电缆深潜器方法。AUSS的外形图见图1。Menta是一个以最下危险来扩展海军力量范围的概念系统,目前有一个技术验证系统,其全长约10.36m,水面排水量7.25t,负载能力1500kg,最大速度10kn,续航力5h(5kn时)。Menta的外形图见图2。Remus6000自主无人水下航行器是Hydroid公司系列AUV产品中工作深度最大的一型。由于Remus6000型AUV采用跟踪海底的自主作业模式,它可携带有效载荷达到很大水深,以测量海水特性,包括电导率、温度及化学成分,并且通过测深、侧扫声纳、磁学、重力学以及照相等测绘和海底成像。2009年6月1日法航AF447航班在大西洋失事,2011年2套Remus6000在失事海域进行了深海搜寻、探测。2011年4月3日Remus6000的侧扫声纳以700m的量程、120KHz频率,发现了一个600m×200m的失事航班遗骸散落区。BluefinAUV系列包括Bluefin-9、Bluefin-12、Bluefin-21、Bluefin-21BP等4个AUV产品,在科学、军事和商业等应用领域均拥有较高的声誉。在马航失联事件水下搜寻过程中,澳大利亚使用了美国生产的“Bluefin-21”进行搜寻。“Bluefin-21”代表了目前深水搜索的先进水平,该产品装备有声学探测和光电成像设备,能够实现对海底大范围、高分辨的搜寻与扫描,确定遇险目标位置,并根据水下遇险目标的高清晰光学图像能够为救助打捞的决策提供技术支撑。
加拿大的UUV主要包括探索者级系列、ARCS和Theseus等等。其中,探索者级AUV长约4.5m,直径0.69m。在该AUV的负载段可携带各种不同的负载,根据搭载负载的不同,其空气中的重量在580~800kg之间,其最大潜深为300~500m,其巡航速度在0.5~2.5m/s之间。其携带的1.1m长可伸缩通信天线,有助于任务的再规划,并且可以增加母船和航行器之间的通信距离。
挪威的UUV主要有Hugin(休金)系列。英国的主要包括Autosub和护身符等。法国的主要是Alister系列。德国的主要是海獭系列。俄罗斯的主要包括SKAT、L-2和MT-88等等。日本的主要有R-one、R2D4、URASHIMA和深海6500等等。
国内多家单位开展了UUV相关研究。目前,中国已经研制出了潜深100~11000m的全海深的各类UUV。例如,研制出的“潜龙一号”自主水下航行器最大工作水深为6000m、巡航速度为2kn、最大续航能力24h、空气中重量1500kg。“潜龙一号”已经完成了大洋第29航次的应用性试验任务,任务包括近海底声学和水文等综合调查。
下面,介绍一下ROV的发展历史:
⑴婴儿阶段(1953-1965年)。F.Busby R等学者认为第一个ROV很可能是1853年由Dimitri Rebikoff制造的。它叫做POODLE,它是Rebikoff的潜水传送器PEGASUS的改进产品。随着水下摄像机的发展和应用,寻找目标的方法是通过将一艘船只系固在某一区域并且移动或牵引一个三角架,这个三角架在一个平底容器中承载着摄像机,并且沿着海底倾斜。用打捞机寻找丢失的物体是一种即没有效率又很艰苦的方法,但它确实能找到。J.R.R.(Bob)Harter同海军舰队局共同找到了减小低效性的一个方法,研制一个易操作的水下摄像系统———移动水下机器人系统。需要构建出一些单元,随着试验成功的程度改变,最终形成了一个理想工作的单元———6号系列。它于1961年被交给海军军事用品测试局。它被称作是VARE机器人,它装有一个蛤壳状的爪,由海军实验室操作和管理。不幸的是,这台机器有太多的问题而且可靠性较低,所以,它很难离开实验室被产业化。随后,它的改进型———缆控水下探索机器人(CURV)被研制出来并得到了一定的推广应用。
⑵儿童阶段(1966-1974年)。在美国海军大量的搜索和恢复努力下,CURV1996年在西班牙沿海从水下2850英尺(869m)深处确定位置并成功找回一个遗失的氢弹的事件中扮演了重要的角色。在超过它的最大潜水深度的水深众,而且炸弹还与降落伞的伞绳缠到仪器的情况下,它成功地巡回炸弹并因此立刻名声大噪。早期的CURV在军事上很是得意,并以增大其家族成员作为回报。海军实验室的资金开始慢慢流向支持额外工作,技术开始进步。为了在浅水环境下工作,更小型的机器被研制,它是用水面上来的液压控制,它是继电子SNOOPY之后的产品。随同其他机器仪器,CURV的功能继续进化,携带单元越来越多。ROV的发展很不幸,它们仍然坚持载人潜水器,需要操作人员在远程位置进行工作的能力。随着ROV慢慢地持续发展,最大潜水和载人潜水器盛行起来,到1974年为止,制造了20多台机器。但是,并没有真正的大事件让新型机器和潜水器和载人潜水器去争夺大家的注意中心,直到1973年,在水深1575英尺下,PISCES3型载人潜水器载着它的两个乘坐人员慢慢到了氧气耗尽的底部。最后通过海军无人系统CURV3营救成功后,达到了轰动性的影响。
⑶青春期阶段(1975-1982年)。成熟阶段总体来说就是数目的猛然增长,重点是令人莫名其妙获知无理性的行为的那段时间。尽管ROV迅速发展这段时期是有争论的,而且很多人还说现在还在继续着,然而他却是一座里程碑,发展曲线几乎成级数增长,到1982年为止已经生产了500多台机器。
⑷“不成熟阶段”(1982-1989年)。尽管ROV在发展和被认同上都有了进步,仍被许多人认为在一段长时间是“不成熟阶段”。在这个时期内,ROV出现了一些反复状态,技术在进步,系统也正在升级中。
⑸成熟阶段(1990年至今)。自20世纪90年代到来为止,ROV工业到达了它的成熟期,形成了一个巨大的互动产业,全球有超过100家的制造商。
下面,对本节内容进行归纳总结。水下无人航行器等海洋装备包含的关键技术有:导航算法、水下对接、布放与回收、浮力调节、绿色低功耗推进、轨迹跟踪与路径规划、总体技术,等等。其中,导航与控制是自主式航行器的核心技术。近年来,涌现出大量的导航新技术、控制的新算法等成果,极大地提升了该类装备的智能化。此外,还有很多关于该研究领域的总体发展趋势、关键技术、总体测试技术等的综述性文章对本领域的研究做了深入而全面的分析。
二、我国UUV的研究现状
我国很早就开展了UUV装备和技术的研究。针对远程运载、水下防务、信息对抗、大坝及水库检查到水下打捞等应用领域,我国对大型、中型、小型和微型UUV都进行了深入研究,有很多成熟的型号。例如,我国研制的MerMan-100型AUV配备有中科院声学所研制的声学设备,主要针对海洋监测,水质检测,军团协作作业,母船、港口和航道防务等使命任务设计。该AUV的技术特点是采用模块化设计思路,根据不同的作业任务增减不同作业模块,有利于便携作业。海豚一号是一种小型AUV,搭载浙江大学研制的合成孔径声纳,主要用于探测水下小目标和掩埋目标。
一种典型的AUV组成结构如图所示。
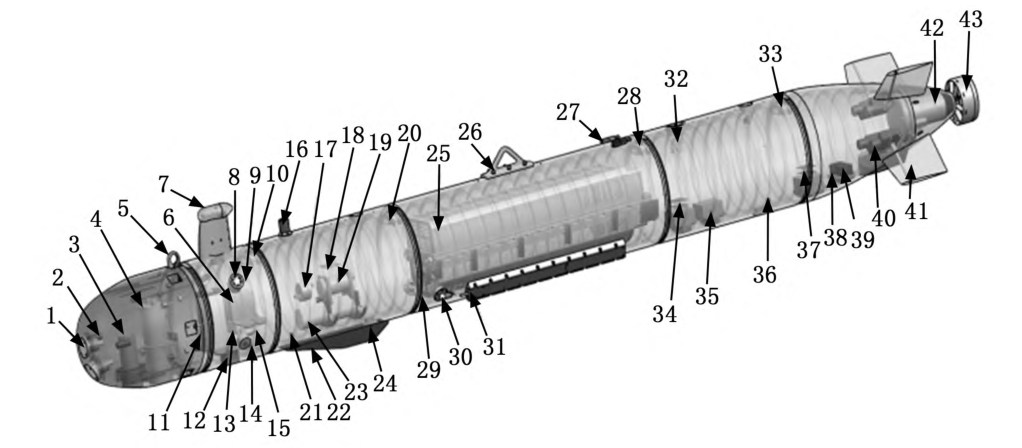
1.避碰高度计;2.水声应急信标;3.应急抛载;4.深海相机;5.拖曳环;6.中控;7.北斗示位定位装置;8.调试口;9.交换机;10.快速对接装置;11.惯导;12.DVL换能器;13.DVL控制盒;14.导航控制段漏水报警板;15.深度计;16.水声通信换能器;17.水声通信控制盒;18.声纳存储处理板;19.闪光灯电源盒;20.快速对接装置;21.载荷段漏水报警板;22.闪光灯;23.侧扫声纳电子舱;24.闪光灯入舱件;25.二次锂电池组;26.起吊环;27.充电口;28.快速对接装置;29.能源段漏水报警板;30.声纳入舱件;31.侧扫声纳换能器;32.电源开关;33.快速对接装置;34.继电器板;35.仪器电电源模块;36.载荷拓展段漏水报警板;37.艉部单片机板;38.推进段漏水报警板;39.舵机控制器;40.舵机;41.舵板;42.主推电机;43.推进器。
图 一种典型的AUV组成结构
此外,我国还研制出一款小型搜救ROV,广泛地应用到各类抢险救灾领域。该ROV灵活机动、抗流能力较强。该ROV采用了扁平的立方体外形,利用光缆对它进行操纵。该ROV装载的是美国的DIDSON声纳,该声纳采用了声学透镜技术,成像质量好,分辨率高。该ROV由于小巧灵活,可以适应浅近海的各种复杂地形。同时,它具有较高声学成像质量,所以它可以高效地执行各类复杂的搜索与救援任务。
国内某研究机构还研制出一款大深度AUV,它主要用于大深度水下目标探测与搜救任务。该型AUV可以在6000m深的海域进行至少24h的目标搜索与探测。该AUV采用的是较先进的十字分布四桨推进,如图5所示。该AUV的实物如图6所示。
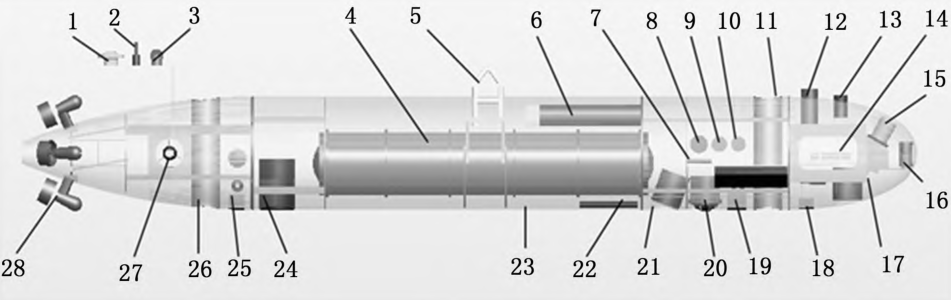
1.卫星定位装置天线;2.电台天线;3.频闪灯;4.耐压舱;5.吊钩;6.侧扫声纳电子舱;7.深度计;8.水声通信设备电子舱;9.水声定位设备电子舱;10.定向导引声纳电子舱;11.垂直推进器(前);12.水声通信设备换能器;13.水声定位设备换能器;14.CTD;15.抛缆装置;16.前视声纳;17.定向导引声纳换能器(水平阵);18.上浮抛载装置;19.下潜抛载装置;20.DVL;21.水下相机闪光灯;22.定向导引声纳换能器(竖直阵);23.浮力材料;24.水下照相机;25.平衡抛载装置;26.垂直推进器(后);27.尾部横向推进装置;28.尾部主推进装置。
该AUV的技术特点主要包括:
⑴深海水下目标自主搜寻与探测系统的功能定位要求,基于模块化设计技术、轻质结构设计技术、组合导航定位技术等。该AUV提出了深海水下目标自主搜寻与探测系统总体技术方案,具有搜寻效率高、信息交互实时、重量轻、对母船依赖性小等特点。为深海遇险目标搜寻、探测与定位提供基础平台技术,为救助打捞工作提供支撑。
⑵基于实时获取的海底声纳图像进行自动目标检测,提高单次水下任务中目标探测效率,同时基于AUV的惯导信息和定位信息,将扫描的声纳图像合成为带地理信息参考的海底图像,为救助打捞工作提供数据支撑。
⑶声信标定向引导声纳技术充分利用声信标信号,首次提出将小尺度深度直线基阵作为水下航行器作业引导声纳接收传感器,实现深海声信标远距离测向,将大大延伸水下航行器探测搜寻声信标作业范围,使水下航行器作业能快速搜寻并锁定目标,对提高水下航行器作业效率意义重大。
该AUV的技术难点主要包括以下几点:
⑴大深度耐压材料、结构和设备。很多常规设备和材料无法承受6000m的大深度压力,所以一些耐压技术需要在借鉴“蛟龙号HOV”的相关经验,进行自主探索与突破。
⑵多声纳设备的搭载及兼容技术。AUV需要搭载深海地貌、地质探测传感器。各种任务传感器的合理选择、优化配置及正确使用,决定了深海AUV的功能实现情况和整体性能优劣,对AUV搭载的所有任务传感器以及各种声学设备进行合理的架装与集成应用设计,是AUV方案设计中的重要环节。同时,由于多种传感器同时工作,极易产生相互干扰的问题。在研制中,将采取以下措施:①在满足总体功能要求下,对传感器物理位置进行合理布置,减小相互干扰;②对声设备使用频率尽量错开;③对声设备采用声同步装置控制,减少相互干扰。
⑶深海导航定位精度:深度信息的融合和校准。由于此AUV的深度变化范围大,所以在导航算法中必须融入深度信息。把深度计测量得出的深度信息发送给惯性导航装置进行有效的融合才可以提高定位精度。另外,大深度航行时无法利用卫星定位系统进行校准,必须依赖水面的声学定位系统来进行校准。声学定位的精度比卫星定位系统低,同时声波还有一定延时需要补偿。所以,深度信息的融合和对INS的校准都是该AUV的技术难点。
⑷声学图像成像质量和后处理算法。该AUV主要用于目标从探测与搜救,所以对声学图像成像质量及后处理算法有较高的要求。为了提高成像质量必须对AUV的姿态和运动参数都进行较精确的控制。同时还要引入对图像的亮度、清晰度和对比度的增强算法来提高图像质量。为了进一步提高目标识别的可靠性,该AUV还搭载了光学探测设备。在光学图像信息的帮助下,进一步优化声学图像的后处理算法,可以有效提高目标探测和识别的成功率。所以,声学图像成像质量和后处理算法也是该AUV的技术难点。
下面,再介绍一款最早可以实现水下精确导航的国产AUV。
该款AUV的指标为:重量(空气中)≤40kg、体积≤Ф240×17000mm;最大速度5kn;定位误差≤15m(RMS);作业水深≥180m;使用海况≤3级;抗流能力≤4kn。
下面,再介绍几款ROV产品。国产的某款警用的小型ROV主要用于水下安防和反恐等。该系列ROV搭载的是加拿大出产的高性能声纳,可以对水下较小的可疑目标进行探测识别。目前,该系列ROV已成功地运用在运动会和大坝的安防工作中。
某款国产的深海作业ROV主要用于实时水下声纳探测、水下光学观测、打捞水下沉物、处理可疑目标等。
它的主要技术指标为:深度≥1200m;缆长≥1500m;最大水平前进速度≥2.5kn;最大作业距离≥600m;重量≤1300kg;前视声纳探测距离≥180m;光学观测能力为2路水下电视(含水下照明灯4个);作业能力为5功能和7功能机械手各一个。
该款水陆两栖ROV的指标为:重量≤120kg;续航力≥8h;最大工作深度≥100m。该型ROV机器人可水陆两栖机动、长距离实时操控,能在黑暗、复杂的水下环境中完成环境观测、搜救、水下通讯等任务;可以建立水下被困现场与水面指挥系统的双向通讯,为水面指挥系统提供救援决策依据。
以上就是国内目前几款具有代表性的AUV和ROV产品。下面,具体介绍几个UUV领域的关键技术。这些关键技术往往也是制约UUV发展的瓶颈技术,这些技术的突破往往意味着UUV技术的进步。这些技术包括:
⑴总体技术。该技术是指UUV的舱段设计,内部设备与框架的布局配置,重心、浮心、中心的计算,稳定性和操纵性的分析,电气连接与穿舱件的布局,等等。同样的一批设备通过优化布局与配置可以使得UUV更加稳定,操控性更好。所以,UUV设计前通过先进的总体技术可以达到事半功倍的效果;
⑵能源与推进。目前常用的能源为一次或二次锂电池。燃料电池、核动力等是未来的发展方向。最常用的推进方式是推进桨和舵机。近年来,十字舵、X形舵、泵喷和大侧斜桨、低速单叶桨等技术被引入到UUV中;
⑶导航与水声通信。AUV常见的导航方式为高精度光学惯性导航装置(惯导)与多普勒计程仪进行组合导航。ROV常用MEMS惯导和水声定位装置进行组合导航。基于半球谐振陀螺和旋转调制技术的高精度惯导是未来的发展趋势。水下通信最大的问题是丢包与延时。近年来的一些新的高速大宽带水声通信技术也被逐渐引入到UUV中;
⑷低噪声与高隐蔽性。对于军用UUV,静寂性十分重要。低反射截面的外形、消声瓦、吸声材料、吸声涂层、低噪声推进(例如:泵喷,等)、低噪声惯导(例如:半球谐振惯导、光纤惯导等),这些技术都已经在UUV的研制中得到一定的应用;⑸外形设计与外壳加工。一个优化后的外形意味着较低的阻力,从而可以节省能源,提高航程。外形主要分为迎流段、平行主体段和去流段。迎(去)流段舱体由迎(去)流壳体、内部加强筋、各类孔座和艉端盖等组成。迎(去)流段壳体的线形一般为样条等各类复杂曲线,且其上开设了各种孔座,所以其流体力学分析很复杂,一般采用有限元软件对其进行仿真计算。壳体除了承受内部各种设备载荷的重量外,还要承受外部强大水压的均布载荷。所以其材料选择和加工制作工艺也十分重要。传统的外壳通常使用铝合金,近年来钛合金和碳钎维等也被应用于UUV的外壳加工中;
⑹浮力调节与应急抛载。常用的浮力调节有水舱、油馕、垂推、调整俯仰角等方式。常用的应急抛载为重量经过仔细核算的铅块或铁块,使用爆炸螺栓或电磁阀等方式实现抛弃;
⑺布放与回收。常用的布放与回收方式为吊车吊放及回收。近年来,滑道布放、小型AUV的手抛式布放、回收网回收、打捞网回收、自动入坞等技术也得到了一定的发展。
三、未来发展展望
未来AUV的研制会引入越来越多的新技术。这些技术归纳起来总结如下:
⑴功能的多样化:适时绘图、三维或多维动画成像、海底气象预测、水下侦听与反侦听、高精度的定位与导航。未来对海洋调查的需求会越来越多,以后的AUV希望可以快速和实时地进行成像与绘图,甚至可以进行三维或多维动画成像。从而可以大大提升资源勘探和水下测绘等的效率。此外,以后的一些应用将进一步扩展,在AUV搭载的计算机里存储一些气象数据处理软件并搭载一些可以采集测量气象数据的传感器,那么AUV就可以执行水下海洋气象预测等新任务。未来的军事领域必将对AUV提出水下侦听与反侦听等新要求。这就要求AUV有较强的声学信号捕获能力、较强的微小或伪装目标的识别能力和一定的作业能力等。所以必须引入一些新的声学技术以及研制一些特种机械手等来满足这些需求。在一些特殊任务中离不开高精度的定位与导航技术。如何在得不到有效的外部校准的前提下提升定位精度是一个难点。通过引入一些先进的导航算法有望解决这一难题。
⑵模块化:针对不同的任务安装不同的模块。在MerMan-100的研制已经采用了模块化这一理念。这是未来AUV的一个发展趋势,美国的部分Bulefin产品已完全采用模块化结构。在以后的一些AUV的研制中会进一步加强模块化的设计理念。针对不同的任务在同一个AUV上安装不同的模块,不必去研制不同的AUV,这样可以大大提高研制效率,降低成本。
⑶智能化:自主任务规划、自主路径优化、自主目标判别。人工智能自从诞生以来在各个领域发挥着重要的作用。通过改进AUV的软件算法和硬件设备,让AUV具备自主任务规划、路径优化和目标判别等功能,则可以大大提高AUV的智能化程度。⑷组网观测:若干AUV组网、若干AUV与HOV/ROV组网。一个AUV的能力总是有限的,要想对一大片海域进行高效地快速观测调查,可以采用对大量水下观测设备进行组网的技术。对若干AUV进行组网,可以加强AUV的实时通信能力,使得众多AUV可以在某个AUV或母船的指挥下统一行动,提高海洋调查的效率。另外,总有些复杂任务必须依赖人工操作。所以可以把若干AUV与某些HOV或ROV组合起来共同执行一些任务。指挥人员通过HOV或ROV对若干AUV发送指令,当某个AUV探测到可疑目标需要人工作业则由HOV或ROV赶到特定区域去执行任务。
⑸超远航程:三级式推进、新型布放回收技术。深远海的调查离不开AUV的超远航程。以后的AUV计划采用三级式推进的方式来大大提高航程。首先由母船(水面舰船、潜艇或深海空间站等等)搭载重型AUV向目标海域靠近,然后布放重型AUV。重型AUV接近目标海域后,布放搭载的具有加强探测能力的小型AUV,由它达到目标区域进行研究。通信时也采用逐级上报/下发的模式,可以有效地解决通信距离过长导致的信号过于微弱等问题。三级式推进方式离不开新的布放回收技术。其中AUV的水下对接就是一个核心技术。引入常见的V形剪+弹簧机构、杆+滑盖、对接管+圆锥导向罩、锥形管状框架、V字形定位装置+平台上的锁定机构、捕捉臂、机械臂、对接裙口、对接平台、声学导引、视觉对准和导向缆等技术。同时,借鉴航天对接里的异体同构周边和锥+杆这类对接机构,可以有效地解决重型AUV和小型AUV之间的对接难题。母船与重型AUV之间可采用发射管、回收网、吊车和机械手布放等回收方式。
⑹隐蔽性:降噪和抑制回波。在一些敏感海域,隐蔽性是一个不可回避的问题。如何利用一些先进的技术来减小AUV的噪声和回波是一个技术难点。目前,一些AUV的推进已采用泵喷这类噪声较小的推进方式。采用一些新结构、新材料和新涂层材料来有效地抑制回波也是未来的一个发展方向。
⑺适应复杂水下地形:线控小型声纳技术。深远海的水下地形复杂多变,未知因素过多,不得不考虑抵抗恶劣环境和适应复杂地形这类问题。为了能在复杂地形中有效避障,必须提升UUV的探测能力。为了可以探索海沟、狭缝等这类地形地貌,可以采用布放搭载的小型AUV或发射线控小型声纳这样的技术。
⑻节能环保:新型推进方式。节能环保永远是人们在科研中所追求的目标。水下滑翔机和波浪滑翔机这类观测平台也是一个发展方向。它们分别利用浮力调节机构和水下翼板可以轻松地实现能耗小航程远的巡航。然而,它们的巡航几乎只受水密度、洋流和波浪强弱等外界因素的控制,很难实现受控的自主航行。引入先进的卫星通信、太阳能电池、基于模型预测的轨迹跟踪、智能规划等技术,使得它们具有一定的受控的自主航行能力,势必大大扩展这类航行器的应用范围。
下面介绍ROV的发展趋势。从目前国外ROV的研制技术来看已经相当成熟,并已实现了模块化和系列化。随着海洋经济的发展和军事需求的增加,ROV将朝着以下几个方向发展:
⑴向更专业化发展:这是市场和技术的共同需求。尽管ROV功能繁多,能执行各种各样的任务。然而,仅靠一台ROV很难完成复杂的作业任务。所以,未来ROV将根据特定的任务需求搭载最合适的专用作业设备。在ROV载荷尽量轻的前提下,最大地提升ROV的作业效率,缩短作业时间。
⑵向操作更加简便、快捷发展:未来的ROV,人机交互会更好。在人机工程迅猛发展的当代,ROV的操控同样需要不断地完善。需要从操作性能、控制精度、人机交互界面、响应速度等多方面不断地改进,使得操作更加简便、快捷。
⑶向ROV与AUV技术融合发展:正如前面的分析,ROV和AUV各有利弊。如果可以取长补短将它们有效结合起来,势必得到更高的作业效率,缩短作业时间。一种常用的组合方式是与母船近距离的复杂任务(例如:水下矿产或生物采样等)由ROV执行,而远距离的搜索、探测等任务由AUV执行。还可以选择ROV与AUV协同作业,ROV作为领航者和团队的指挥带领团队进行高效的作业。ROV和AUV具体组合方式可以根据任务需求进行优化与调整。
四、结束语
综上所述,尽管我国已成功研制出多型UUV,但目前尚未形成系列化产品,UUV在国内的应用依然有很大的发展空间。我国拥有300万平方公里的海洋国土,海岸线长1.8万平方公里,内陆湖泊、重要水库大坝不计其数。若能充分利用各种成熟技术,大力开发UUV,将其大量用于海洋调查开发、重要水道安全巡逻或排障、重要水库大坝监控巡查或检修等领域,不但可以大大降低人员水下作业风险,而且能够取得重大经济效益。UUV的研制将赶上这个时代的浪潮,瞄准新方向不断地创新、突破,势必在我国的海洋研究、海洋工程技术和海洋装备发挥重要的作用。
文章来源:《计算机测量与控制》(2023年第2期)
审核编辑:黄飞
-
AUV
+关注
关注
0文章
11浏览量
11106 -
水下航行器
+关注
关注
0文章
17浏览量
8911 -
uuv
+关注
关注
1文章
5浏览量
4111
原文标题:水下无人航行器的研究现状与展望
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
水下航行器模拟平台系统的总体架构是什么?
运载平台怎么实验水下航行器的功能?
基于Vega Prime实时视景仿真水下航行器应用
使用无人驾驶船部署自主水下航行器的新系统
水下航行器控制半实物仿真系统的组成原理、特点及应用研究

水下航行器辅助的水下地理机会路由协议

水下航行器水下高度、航向和姿态测量方案的介绍
DARPA引领无人水下航行器(UUV)电源技术的进步
水下航行器电机的SiC MOSFET逆变器设计




评论