 陀螺仪LSM6DSV16X与AI集成(4)----Qvar触摸电容配置
陀螺仪LSM6DSV16X与AI集成(4)----Qvar触摸电容配置

概述
Qvar,全称为电荷变化检测(Qvar stands for "Quasi-static VARiation"),是一种用于检测电荷变化的技术。这种技术通常用于传感器和其他电子设备中,特别是在惯性测量单元(IMU)和微机电系统(MEMS)技术中。Qvar 技术可以用于检测微小的电荷变化,这些变化可能是由于物理运动、环境变化或其他因素导致的。 在 LSM6DSV16X 这类先进的 IMU 中,Qvar 技术用于增强用户界面功能,如轻触、双击、三击、长按或滑动手势。它通过检测和解析与这些手势相关的微小电荷变化,来实现高度精准和灵敏的用户交互。 最近在弄ST和瑞萨RA的课程,需要样片的可以加群申请:615061293 。
视频教学
https://www.bilibili.com/video/BV1Vb4y1j7Mt/
样品申请
https://www.wjx.top/vm/OhcKxJk.aspx#
源码下载
https://download.csdn.net/download/qq_24312945/88615379
生成STM32CUBEMX
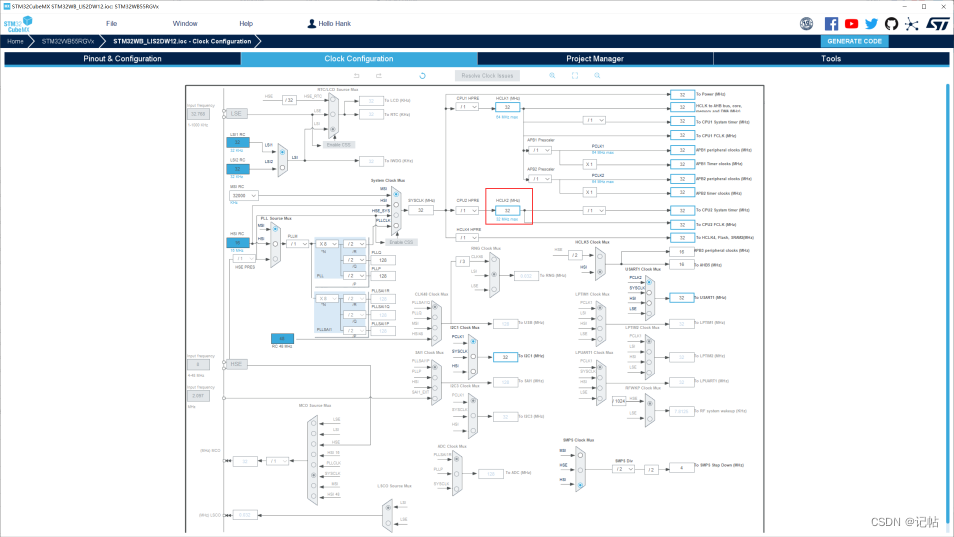
用STM32CUBEMX生成例程,这里使用MCU为STM32WB55RG。 配置时钟树,配置时钟为32M。
串口配置
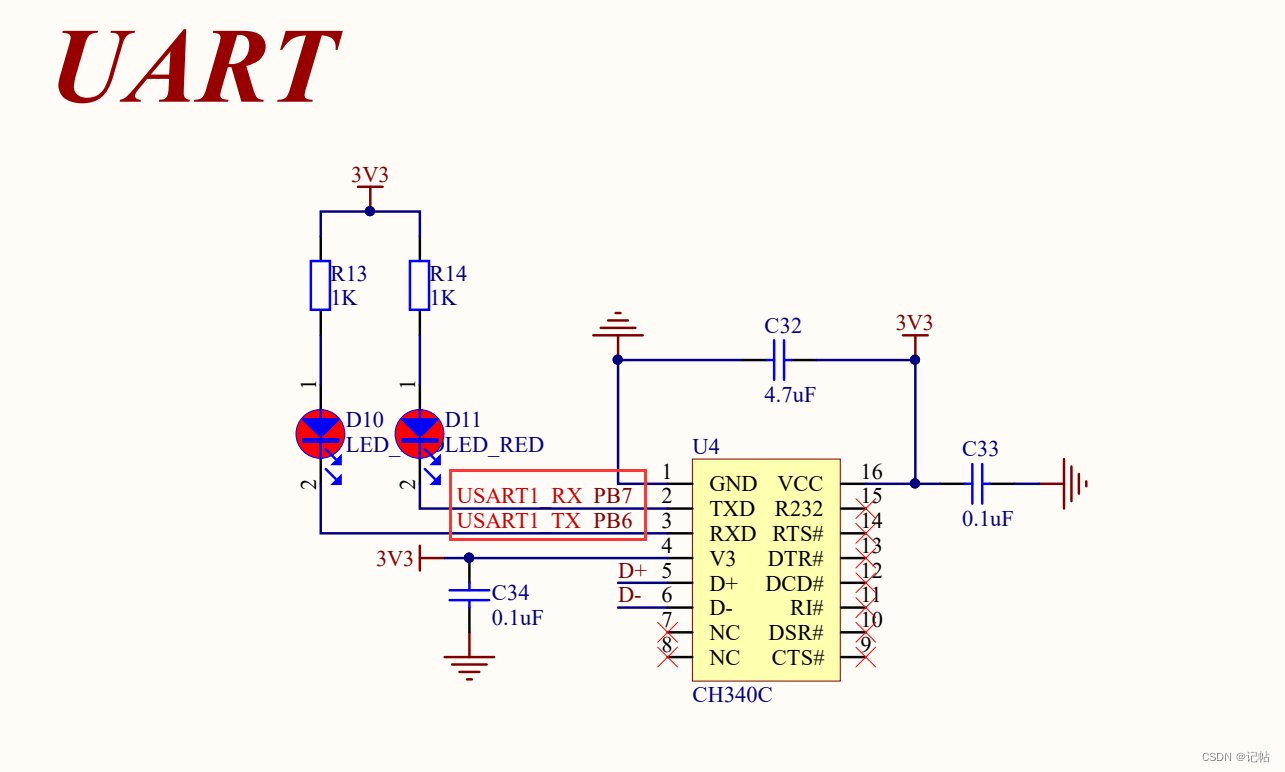
查看原理图,PB6和PB7设置为开发板的串口。
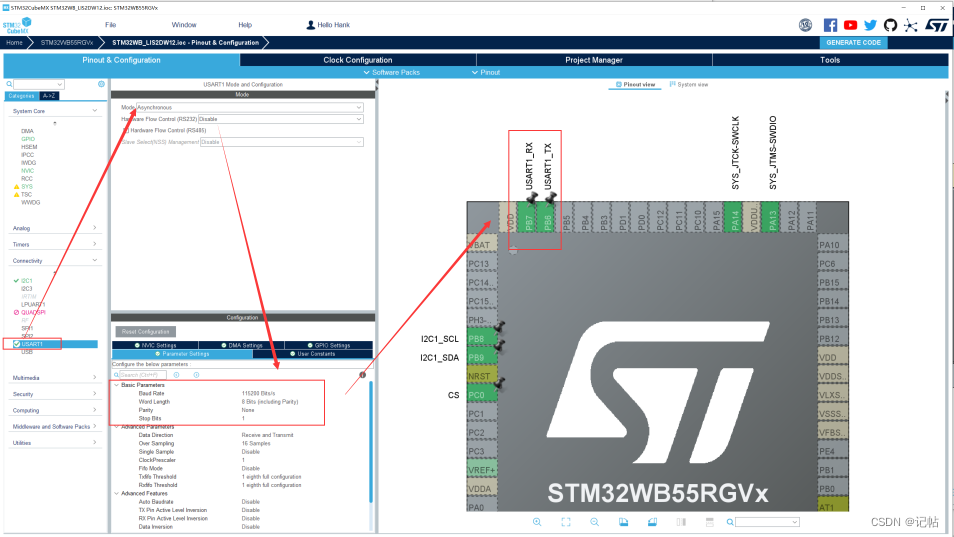
 配置串口。
配置串口。
IIC配置
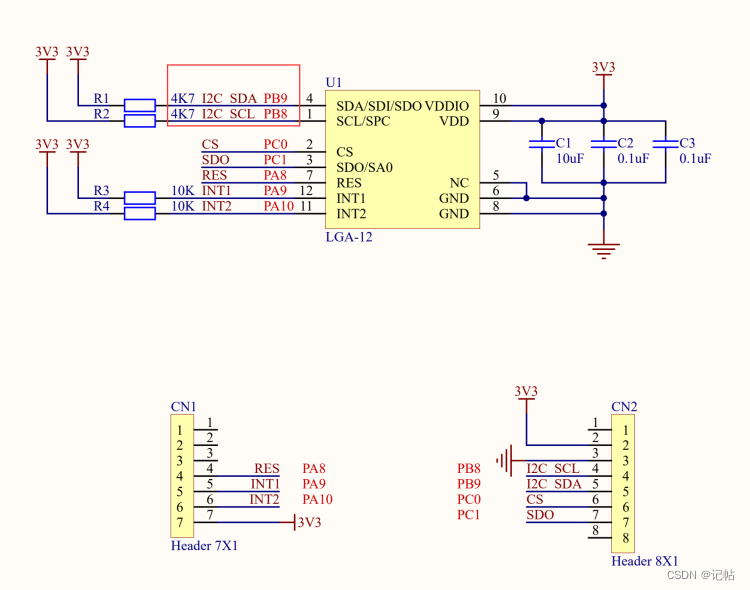 配置IIC为快速模式,速度为400k。
配置IIC为快速模式,速度为400k。 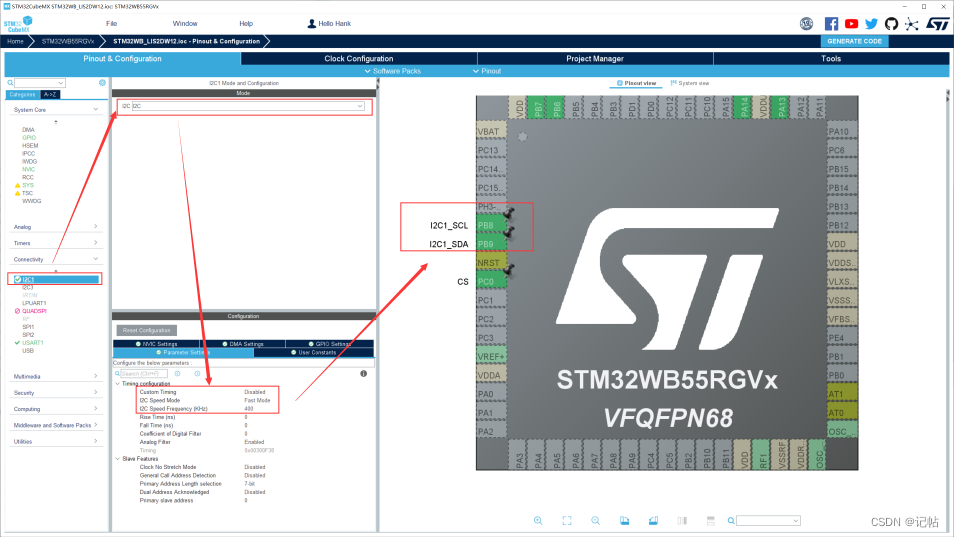
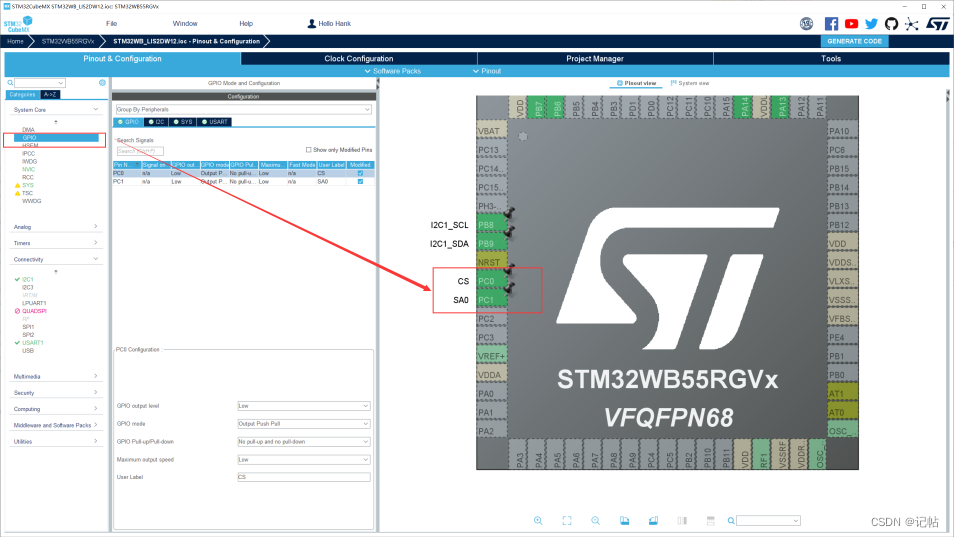
CS和SA0设置
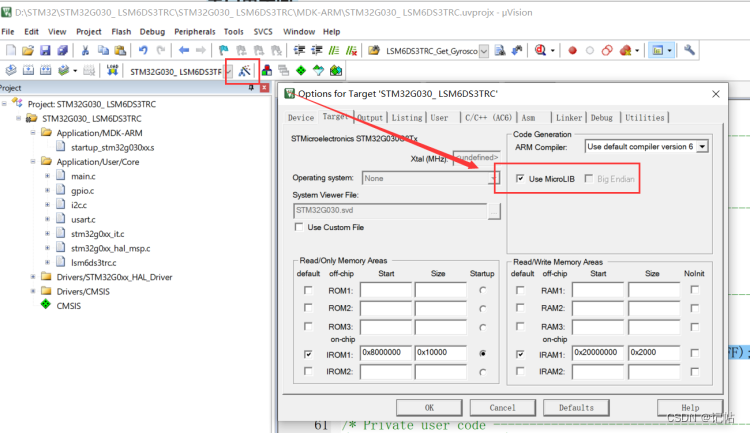
串口重定向
打开魔术棒,勾选MicroLIB
在main.c中,添加头文件,若不添加会出现 identifier "FILE" is undefined报错。
/* USER CODE BEGIN Includes */
#include "stdio.h"
/* USER CODE END Includes */
函数声明和串口重定向:
/* USER CODE BEGIN PFP */
int fputc(int ch, FILE *f){
HAL_UART_Transmit(&huart1 , (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
/* USER CODE END PFP */
参考程序
https://github.com/STMicroelectronics/lsm6dsv16x-pid/tree/main
初始换管脚
由于需要向LSM6DSV16X_I2C_ADD_L写入以及为IIC模式。 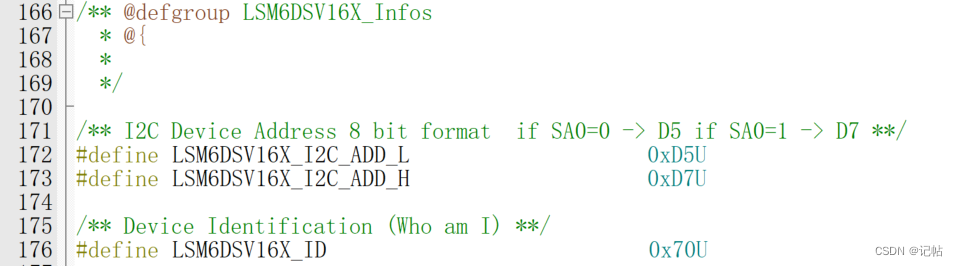
所以使能CS为高电平,配置为IIC模式。 配置SA0为高电平。
printf("123123123");
lsm6dsv16x_reset_t rst;
stmdev_ctx_t dev_ctx;
/* Initialize mems driver interface */
dev_ctx.write_reg = platform_write;
dev_ctx.read_reg = platform_read;
dev_ctx.handle = &SENSOR_BUS;
HAL_GPIO_WritePin(CS_GPIO_Port, CS_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(SA0_GPIO_Port, SA0_Pin, GPIO_PIN_RESET);
获取ID
可以向WHO_AM_I (0Fh)获取固定值,判断是否为0x70。

lsm6dsv16x_device_id_get为获取函数。
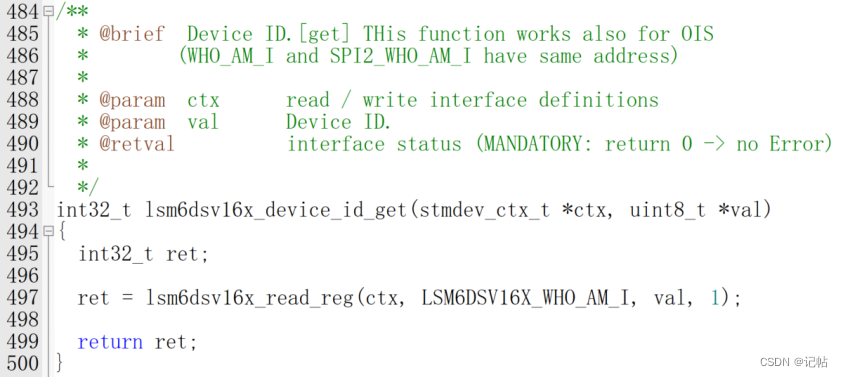
对应的获取ID驱动程序,如下所示。
/* Wait sensor boot time */
platform_delay(BOOT_TIME);
/* Check device ID */
lsm6dsv16x_device_id_get(&dev_ctx, &whoamI);
printf("LSM6DSV16X_ID=0x%x,whoamI=0x%x",LSM6DSV16X_ID,whoamI);
if (whoamI != LSM6DSV16X_ID)
while (1);
复位操作
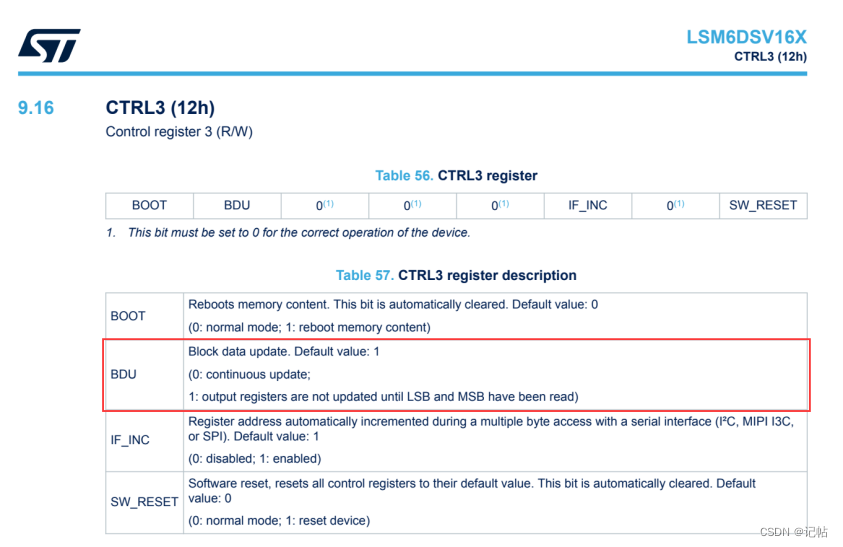
可以向CTRL3 (12h)的SW_RESET寄存器写入1进行复位。 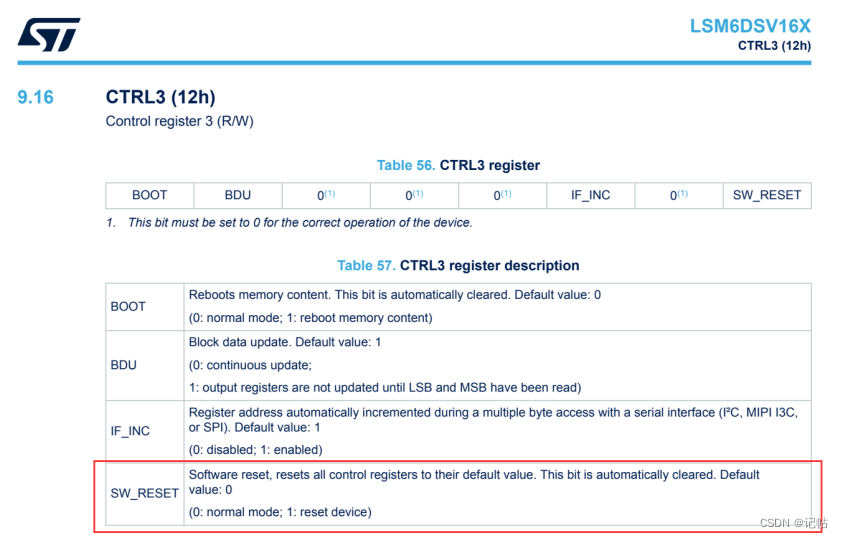
lsm6dsv16x_reset_set为重置函数。 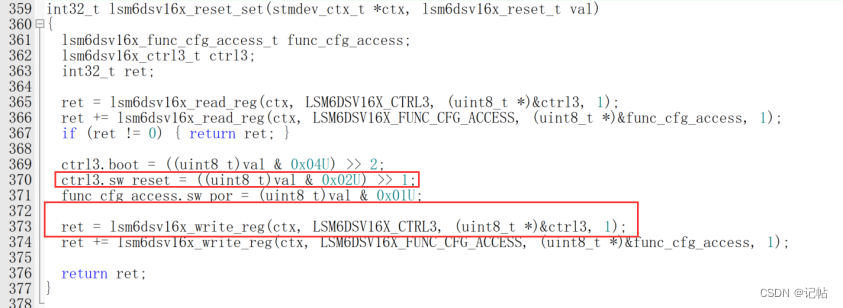
对应的驱动程序,如下所示。
/* Restore default configuration */
lsm6dsv16x_reset_set(&dev_ctx, LSM6DSV16X_RESTORE_CTRL_REGS);
do {
lsm6dsv16x_reset_get(&dev_ctx, &rst);
} while (rst != LSM6DSV16X_READY);
BDU设置
在很多传感器中,数据通常被存储在输出寄存器中,这些寄存器分为两部分:MSB和LSB。这两部分共同表示一个完整的数据值。例如,在一个加速度计中,MSB和LSB可能共同表示一个加速度的测量值。 连续更新模式(BDU = '0'):在默认模式下,输出寄存器的值会持续不断地被更新。这意味着在你读取MSB和LSB的时候,寄存器中的数据可能会因为新的测量数据而更新。这可能导致一个问题:当你读取MSB时,如果寄存器更新了,接下来读取的LSB可能就是新的测量值的一部分,而不是与MSB相对应的值。这样,你得到的就是一个“拼凑”的数据,它可能无法准确代表任何实际的测量时刻。 块数据更新(BDU)模式(BDU = '1'):当激活BDU功能时,输出寄存器中的内容不会在读取MSB和LSB之间更新。这就意味着一旦开始读取数据(无论是先读MSB还是LSB),寄存器中的那一组数据就被“锁定”,直到两部分都被读取完毕。这样可以确保你读取的MSB和LSB是同一测量时刻的数据,避免了读取到代表不同采样时刻的数据。 简而言之,BDU位的作用是确保在读取数据时,输出寄存器的内容保持稳定,从而避免读取到拼凑或错误的数据。这对于需要高精度和稳定性的应用尤为重要。 可以向CTRL3 (12h)的BDU寄存器写入1进行开启。
对应的驱动程序,如下所示。
/* Enable Block Data Update */
lsm6dsv16x_block_data_update_set(&dev_ctx, PROPERTY_ENABLE);
Qvar 功能的实现和配置
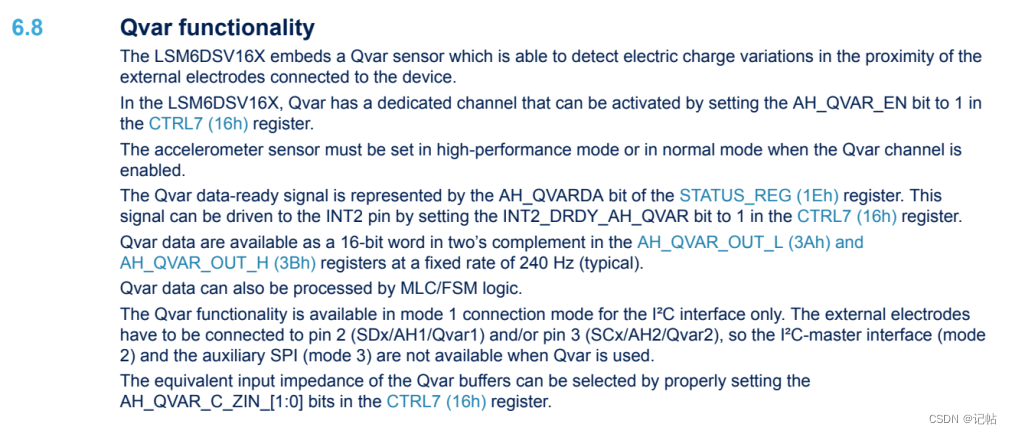
- Qvar 传感器功能: ○ LSM6DSV16X 内置了 Qvar 传感器,能够检测连接到设备的外部电极附近的电荷变化。
- 激活 Qvar 功能: ○ 通过设置 CTRL7(16h)寄存器中的 AH_QVAR_EN 位为 1,可以激活 Qvar 通道。
- 加速度计设置要求: ○ 当启用 Qvar 通道时,加速度计必须设置为高性能模式或正常模式。
- 数据准备信号: ○ Qvar 数据准备好的信号由 STATUS_REG(1Eh)寄存器中的 AH_QVARDA 位表示。这个信号可以通过设置 CTRL7(16h)寄存器中的 INT2_DRDY_AH_QVAR 位为 1,来驱动到 INT2 引脚。
- Qvar 数据输出: ○ Qvar 数据以 16 位二进制补码形式提供,在 AH_QVAR_OUT_L(3Ah)和 AH_QVAR_OUT_H(3Bh)寄存器中以固定 240 Hz 的速率输出。
- 数据处理: ○ Qvar 数据也可以被机器学习核心(MLC)/有限状态机(FSM)逻辑处理。
- 接口模式限制: ○ Qvar 功能仅在 I²C 接口的模式 1 连接模式下可用。当使用 Qvar 时,不支持 I²C 主接口(模式 2)和辅助 SPI(模式 3)。
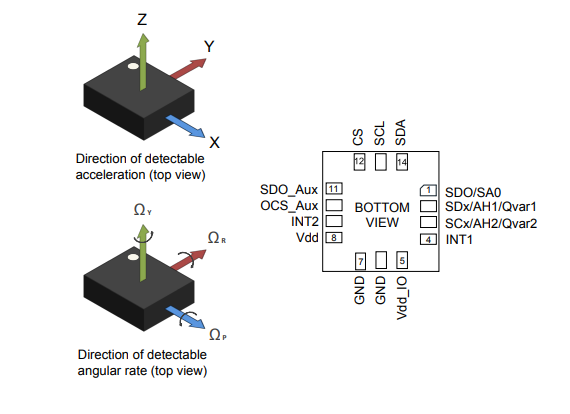
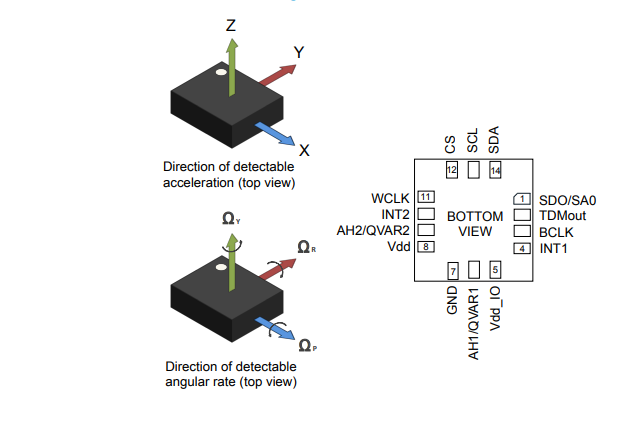
- 外部电极连接: ○ 外部电极需要连接到引脚 2(SDx/AH1/Qvar1)和/或引脚 3(SCx/AH2/Qvar2)。
- 输入阻抗选择: ○ 通过在 CTRL7(16h)寄存器中适当设置 AH_QVAR_C_ZIN_[1:0] 位,可以选择 Qvar 缓冲器的等效输入阻抗。

设置量程和速率
速率可以通过CTRL1 (10h)设置加速度速率。

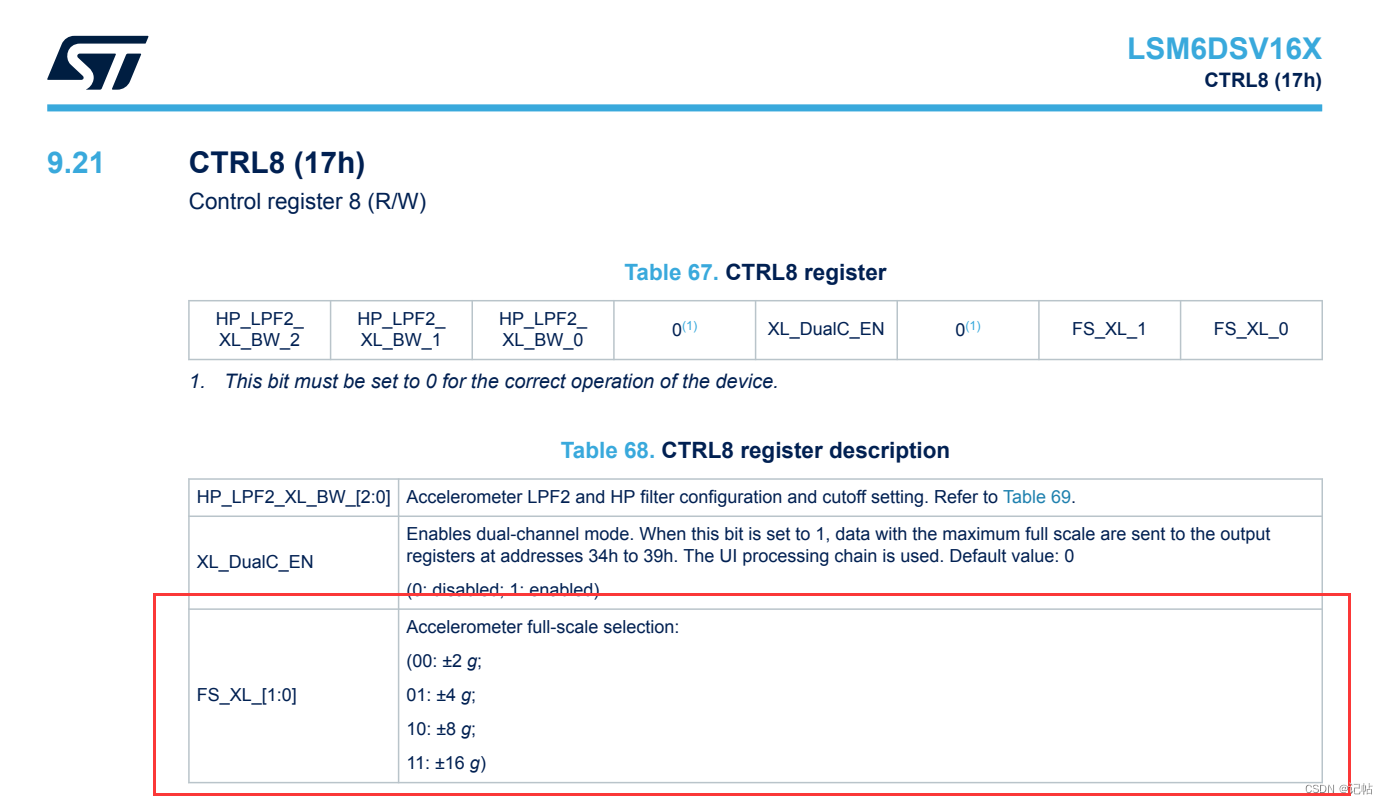
设置加速度量程可以通过CTRL8 (17h)进行设置。
设置加速度的量程和速率可以使用如下函数。
lsm6dsv16x_xl_data_rate_set(&dev_ctx, LSM6DSV16X_ODR_AT_15Hz);
lsm6dsv16x_xl_full_scale_set(&dev_ctx, LSM6DSV16X_2g);
配置过滤链
/* Configure filtering chain */
filt_settling_mask.drdy = PROPERTY_ENABLE;
filt_settling_mask.irq_xl = PROPERTY_ENABLE;
filt_settling_mask.irq_g = PROPERTY_ENABLE;
lsm6dsv16x_filt_settling_mask_set(&dev_ctx, filt_settling_mask);
lsm6dsv16x_filt_xl_lp2_set(&dev_ctx, PROPERTY_ENABLE);
lsm6dsv16x_filt_xl_lp2_bandwidth_set(&dev_ctx, LSM6DSV16X_XL_STRONG);
激活 Qvar 功能
通过设置 CTRL7(16h)寄存器中的 AH_QVAR_EN 位为 1,可以激活 Qvar 通道。 
/* Enable AH/QVAR function */
qvar_mode.ah_qvar_en = 1;
lsm6dsv16x_ah_qvar_mode_set(&dev_ctx, qvar_mode);
获取Qvar数据
可以通过STATUS_REG (1Eh)的AH_QVARDA获取数据是否准备好。


Qvar 数据以 16 位二进制补码形式提供,在 AH_QVAR_OUT_L(3Ah)和 AH_QVAR_OUT_H(3Bh)寄存器中以固定 240 Hz 的速率输出。 
/* Read output only if new values are available */
lsm6dsv16x_all_sources_get(&dev_ctx, &all_sources);
if ( all_sources.drdy_ah_qvar ) {
lsm6dsv16x_ah_qvar_raw_get(&dev_ctx, &data);
printf("QVAR [mV]:%6.2frn", lsm6dsv16x_from_lsb_to_mv(data));
}
HAL_Delay(10);
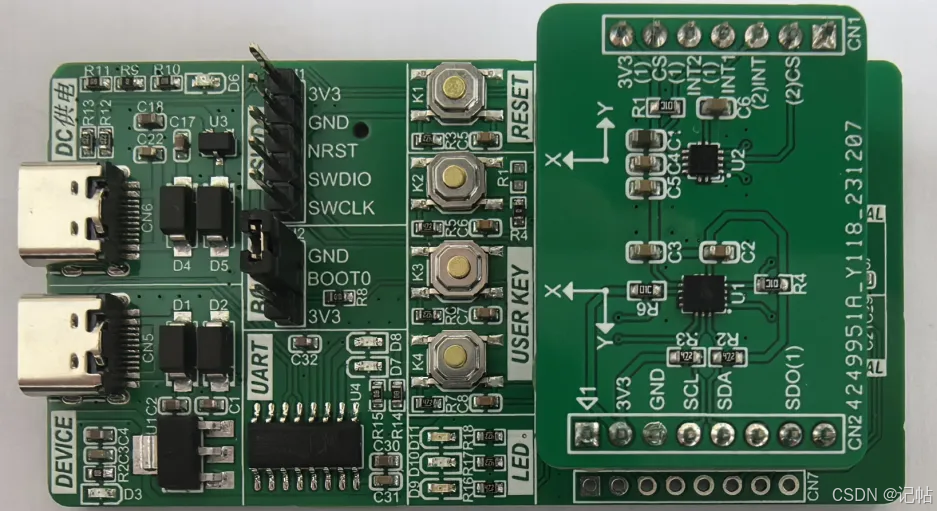
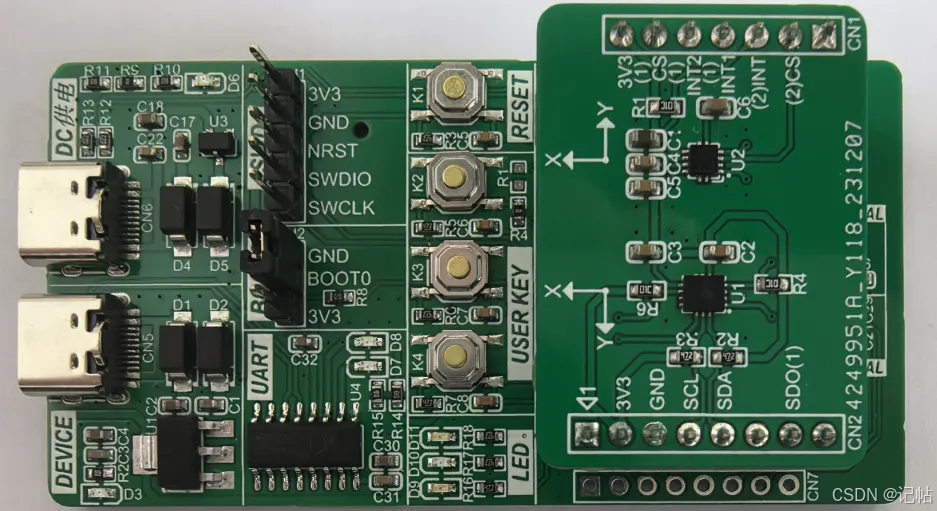
演示
触摸上按键。

触摸下按键。

审核编辑:汤梓红
-
传感器
+关注
关注
2578文章
55863浏览量
795628 -
mems
+关注
关注
129文章
4561浏览量
199935 -
陀螺仪
+关注
关注
44文章
902浏览量
102218 -
AI
+关注
关注
91文章
42117浏览量
303129
发布评论请先 登录
STM32H5开发陀螺仪LSM6DSV16X(4)----中断获取SFLP四元数

陀螺仪LSM6DSV16X与AI集成(1)----轮询获取陀螺仪数据


陀螺仪LSM6DSV16X与AI集成(3)----读取融合算法输出的四元数

陀螺仪LSM6DSV16X与AI集成(7)----FIFO数据读取与配置

陀螺仪LSM6DSV16X与AI集成(13)----中断获取SFLP四元数
陀螺仪LSM6DSV16X与AI集成(14)----上报匿名上位机
STM32H5开发陀螺仪LSM6DSV16X(1)----轮询获取陀螺仪数据

请问lsm6dsv16x可以直接读取触摸手势吗?
LSM6DSV16X内置的传感器融合算法SFLP,输出的四元数是自身坐标系下的还是全局坐标系下的?
ST LSM6DSV16X iNEMO惯性模块相关的使用信息和应用提示
LSM6DSV16X基于MLC智能笔动作识别(1)----轮询获取陀螺仪数据
LSM6DSV16X基于MLC智能笔动作识别(4)----中断获取智能笔状态
LSM6DSV16X:集成机器学习与静电感应的高性能惯性测量单元
LSM6DSV16BX:集成机器学习核心与Qvar感应的先进惯性测量单元



评论