 DM-FMCW车载雷达通信一体化系统设计
DM-FMCW车载雷达通信一体化系统设计

结合常用的车载调频连续波(FMCW)雷达和扩频通信技术,针对通信与目标探测相结合的综合波形设计、硬件实现等问题,研究了基于直接调制的调频连续波(DM-FMCW)的一体化系统,通过仿真结合理论推导验证信号合成方案的可行性,搭建一体化测试系统。结果表明:利用正交相移键控(QPSK)调制通信信号并不会影响雷达性能;一体化信号的通信误码率与QPSK 信号相同,雷达速度分辨率为0.1 m/s,距离分辨率为1 m。
0 前言
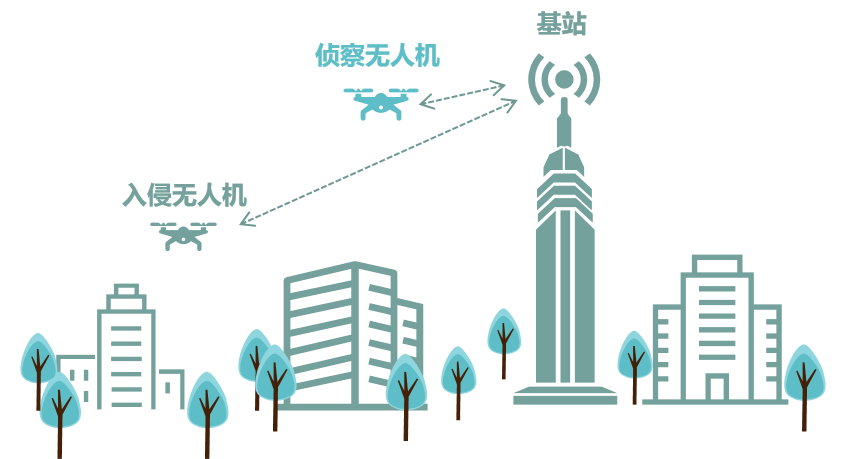
随着数据时代的发展,智能交通及车联网的概念被提出,这要求汽车兼具通信和目标探测的功能[1]。由于调频连续波(FMCW)信号具有恒定包络、短脉冲周期和高扩频增益等特点,因此其具备高距离分辨率、高速度分辨率等优点,被广泛应用于车载雷达系统。以FMCW 为基础的通信及目标探测设备具有体积小、便捷程度高和共享频谱资源等优点。
在各种方式下以FMCW 为基础的雷达信号被用于调制通信信息,杨云飞等[2]针对连续相位调制(CPM)-线性频率调制(LFM)波形中各符号内部调制了通信信息,调制方式采用CPM,使其对雷达性能的影响最低。在调制的通信信息的影响下会产生距离旁瓣调制,并导致波形具有随机性,进而影响多普勒维的脉冲主旁瓣[3]。为此,还需要增加额外的距离旁瓣来进行抑制处理,以弥补雷达性能的损耗[4]。刘耀文等[5]提出将最小频移键控(MSK)信号与LFM 信号相结合,将LFM 信号作为MSK 信号的载波,得到MSK-LFM 一体化信号,但此方案采用低阶调制,通信速率不高,难以应用在实际通信中。
针对雷达与通信共存的情况,本文研究了两者性能间的相互影响,设计并验证了一款易于实现的车载一体化系统,分别采用π/4 相移的正交相移键控(QPSK)来调制帧头信号和通信信号。
1 直接调制的调频连续波(DM-FMCW)信号模型
所设计的一体化信号以连续波为基础,将1 帧通信数据的长度与雷达脉冲重复时间所占用的长度相对应,即认为一个脉冲重复时间(PRT)内所包含的数据为1 帧信号,其包含多个通信符号,利用扫频余弦(Chirp)信号承载通信信息,结合扩频技术可提高信号积累的能量,减少噪声对信号的干扰。信号总体以FMCW 为载波,可将其视为多个Chirp 信号的拼接,数据帧头部分采用固定数量的符号承担,其后的符号可以随机调制通信信息。
作为载波的Chirp 信号sc(t)表示为:

式中:f0为信号的中心频率;k为载波信号的调频斜率,k=B/Tc,B为Chirp 信号的带宽,Tc为Chirp 信号的扫频时长;t为时间,t∈[0,Tc]。
在1 帧信号中,取5 个固定符号置于帧头,用作信号同步,并采用π/4 相移的QPSK 对帧头信号进行调制,以确定信号因信道影响而产生的相位旋转角度。除帧头外的所有符号均可用于加载通信信息,笔者采用QPSK 进行调制。采用2 种不同调制方式可以更好地区分帧头和通信信号。
1 帧发送信号s(t)的表达式如下:
式中:M为用作帧头的Chirp 信号个数;θm为π/4 相移QPSK 调制的第m个帧头符号的信号相位;N为随机调制的通信总符号数;φn为QPSK 调制的第n个通信信号相位。
2 一体化信号的通信解调
一体化信号发送后,经随机信道的二次调制到达通信接收机,接收信号rc(t)被噪声干扰,表示为:

式中:n(t)为高斯白噪声。
采用与载波斜率相同的Chirp 信号对rc(t)进行脉冲压缩处理。为便于理解,对1 帧信号中的第1 个符号进行处理,即m=0,故第1 个处理后的信号r0(t)表示为:
由式(4)可知,经脉冲压缩处理后的输出信号包络近似为sinc 函数,其峰值点相位θ0即为Chirp 信号承载的通信信息。
观察脉冲压缩后信号的频域并提取出频谱峰值点上信号的相位,将其与帧头固定相位信息进行对比,可完成帧同步并确定相位偏移。完成帧同步后,对通信部分信号进行解调,并补偿相位偏移,可得到发送的通信信息。
3 一体化回波信号处理
假设在t=0 时,目标与雷达之间的距离为R,移动目标以速度v进行匀速径向运动,τ为1 帧内信号经过的时延,此时1 帧目标回波信号rr(t-τ)可以表示为:
由于雷达信号接收机收发一体,因此无需对通信信号进行解调,可直接采用去斜率(dechirp)的方式去除一体化回波信号中的通信部分,为便于理解,对接收信号第i帧回波的第1 个符号rr(t-iTr-τ)进行处理,表示为:
式中:I为一次相干处理间隔(CPI)内的总帧数;Tr为雷达回波信号的累积时长;c为光速。
对雷达回波信号进行去通信处理,可得:
式中:xir(t)为每1 帧的回波信号。
将得到的xir(t)重排成快-慢时间维的回波矩阵,并对其快时间维进行脉冲压缩,将脉冲压缩后的回波矩阵进行相干积累,得到目标的速度信息。
4 试验测试
4.1 仿真试验
所设计的一体化波形仿真的信号带宽为150 MHz,载波频率为2.4 GHz,雷达积累脉冲数为300。目标距离雷达17 m,且以7 m/s 的速度与雷达相向而行。在不同进制数(M)和多普勒频移(D)的情况下接收端解调随机产生的通信信息,误码率曲线对比如图1 所示。从图1 可以看出:改变进制数会影响信号的误码率,在不改变多普勒频移的情况下,进制数越高,误码率性能越差;对于相同进制数的信号,解调后的误码率性能受频移的影响,频移越大,误码率性能越差。
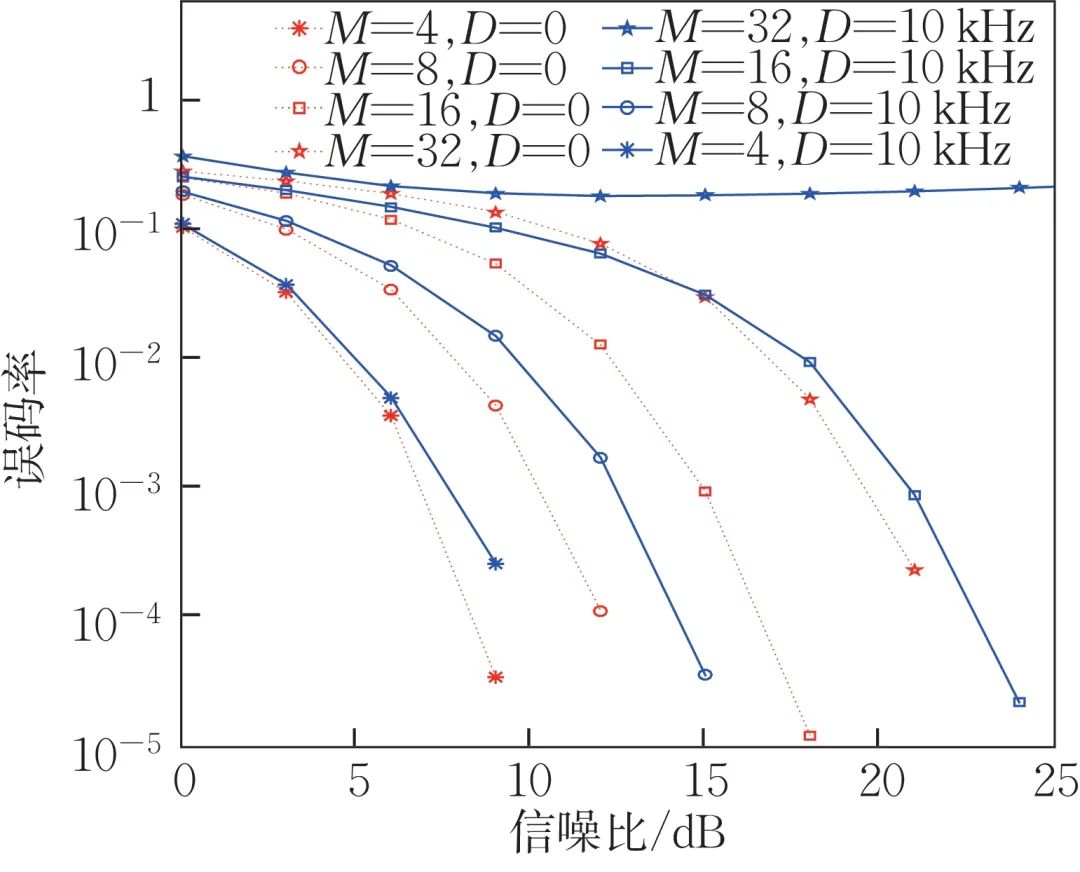
图1 不同信噪比下的误码率
对回波信号的快时间维进行脉冲压缩处理后可以得到目标的距离信息,再对快-慢时间维回波矩阵进行动目标检测(MTD),可以得到目标的速度信息。图2为经MTD 后的距离-多普勒图的速度切面图。
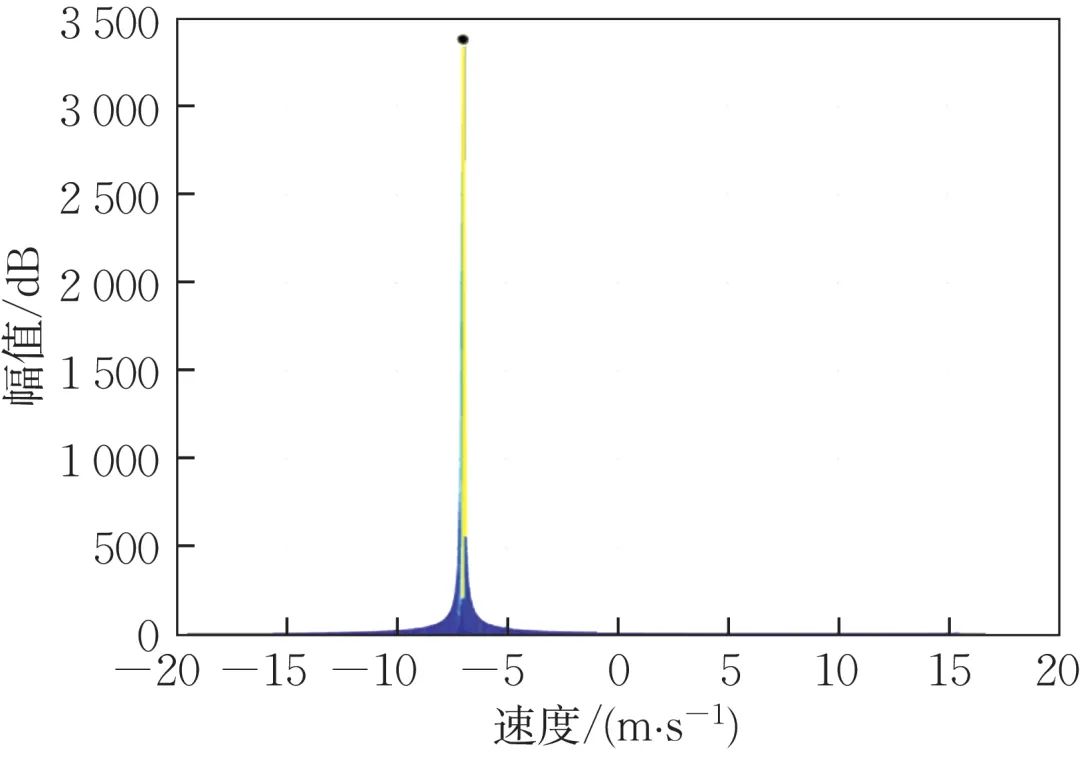
图2 MTD 速度切面图
4.2 实测结果分析
图3为实测数据的解调结果,其中第3 列数据为随机调制的通信信息所对应的解调结果,将其绘制成星座图后发现,所有数据分布在星座点附近,说明解调效果良好。
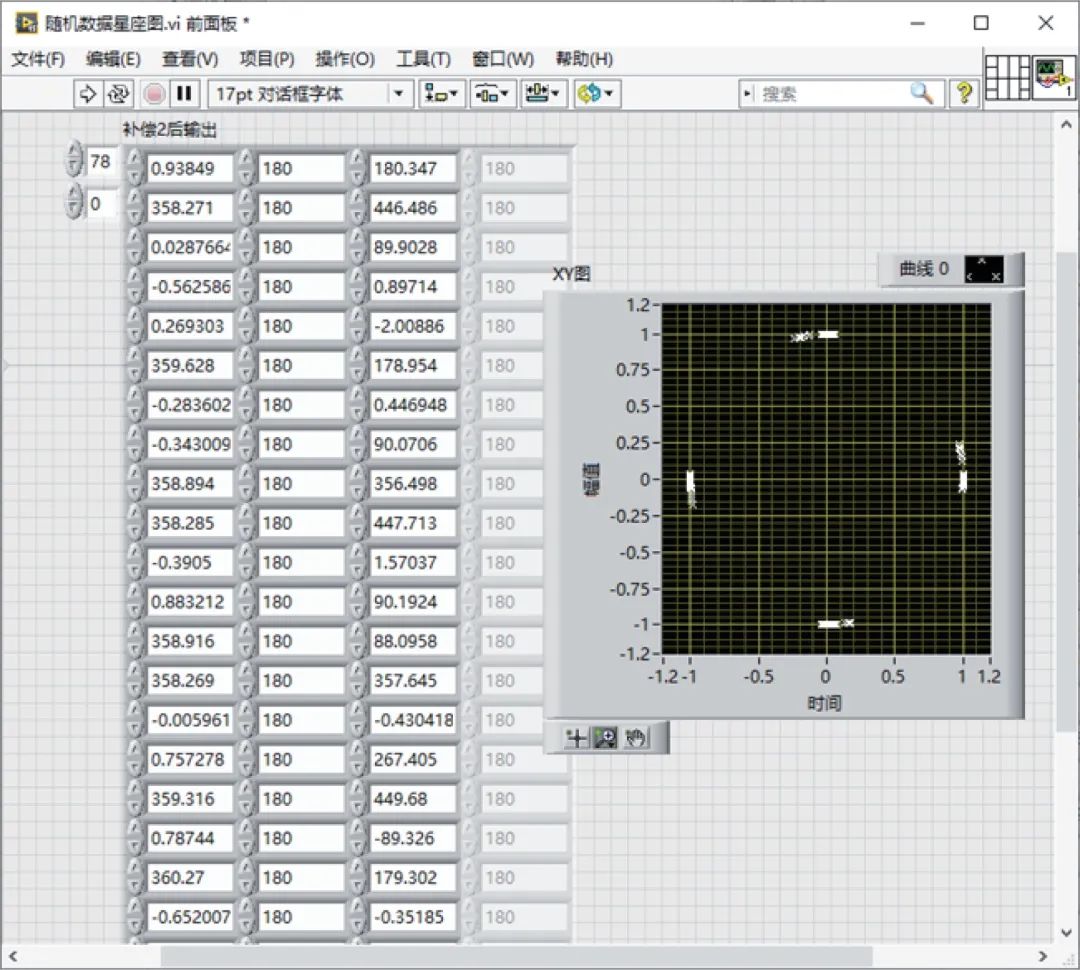
图3 通信解调结果
图4为经MTD 处理之后的距离-多普勒实测图。人体走动速度约为1.7 m/s,面向雷达而行,距离由远及近。图4 中的亮点表示所探测到的目标,亮度越高表示雷达接收到的目标回波信号的功率越强,此回波信号经处理后积累的能量也越多,故杂波对目标探测的干扰越小,更容易辨认出移动目标。
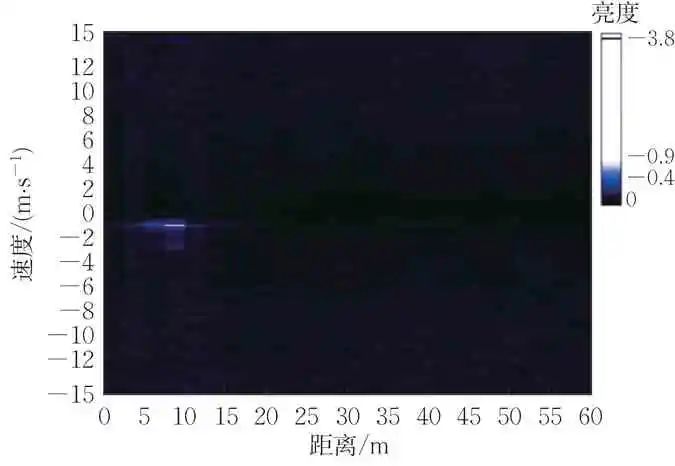
图4 经MTD 处理后的距离-多普勒图
5 结语
设计了基于DM-FMCW 的一体化波形,以FMCW 波形为载波,采用π/4 相移的QPSK 和QPSK 来调制加载信息,将其合成一体化信号。分别给出了通信解调和雷达回波处理方案,并搭建一体化系统。结果表明:调制通信信息不会影响雷达检测性能,雷达距离分辨率为1 m,速度分辨率为0.1 m/s,通信误码率与QPSK 相同。根据此方案设计的一体化系统具有很好的实时性,可以为其他类似调制方式实现一体化提供参考,且所需硬件设备并不复杂,系统模块占用空间小,适合用于车载雷达通信一体化。
-
通信
+关注
关注
18文章
6450浏览量
140269 -
FMCW
+关注
关注
9文章
114浏览量
24381 -
车载雷达
+关注
关注
0文章
41浏览量
13881 -
雷达通信
+关注
关注
0文章
11浏览量
7406
原文标题:DM-FMCW 车载雷达通信一体化系统设计
文章出处:【微信号:阿宝1990,微信公众号:阿宝1990】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
到底什么是“通感一体化”?
什么是机电一体化
机电一体化系统
如何实现机电一体化设计?
通信感知一体化大佬和课题组


OFDM-MSK-LFM雷达通信一体化信号性能分析




评论