 咱做了台小小的移动操作机器人啊!
咱做了台小小的移动操作机器人啊!

在今年大模型的热潮驱动下,我们萌生了做一款便宜且包含各种部件的移动操作机器人的想法,最近刚攒出来,特此宣传一下。

这机器人小小个,这里面门门道道可就有点多了,堪称一部缩小版的Everyday Robot!底盘、机械臂(create3)、深度摄像头、激光、机器人脖子、惯导、高性能处理器,应有尽有,跑ROS2,麻雀虽小可它五脏俱全。
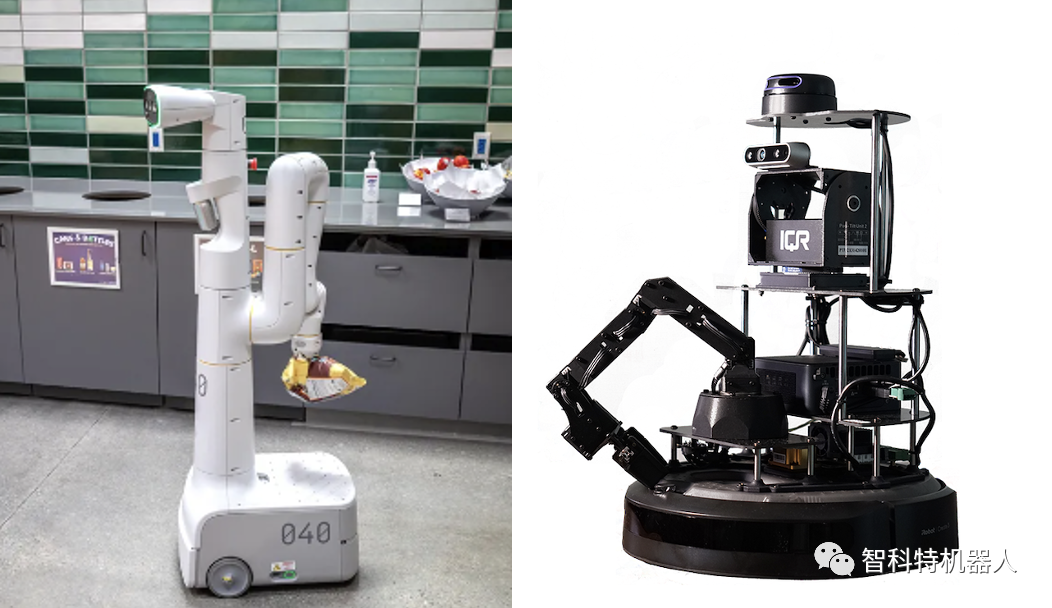
要做机器人大模型,五台Everyday Robot多少钱,五台咱这个!便宜!


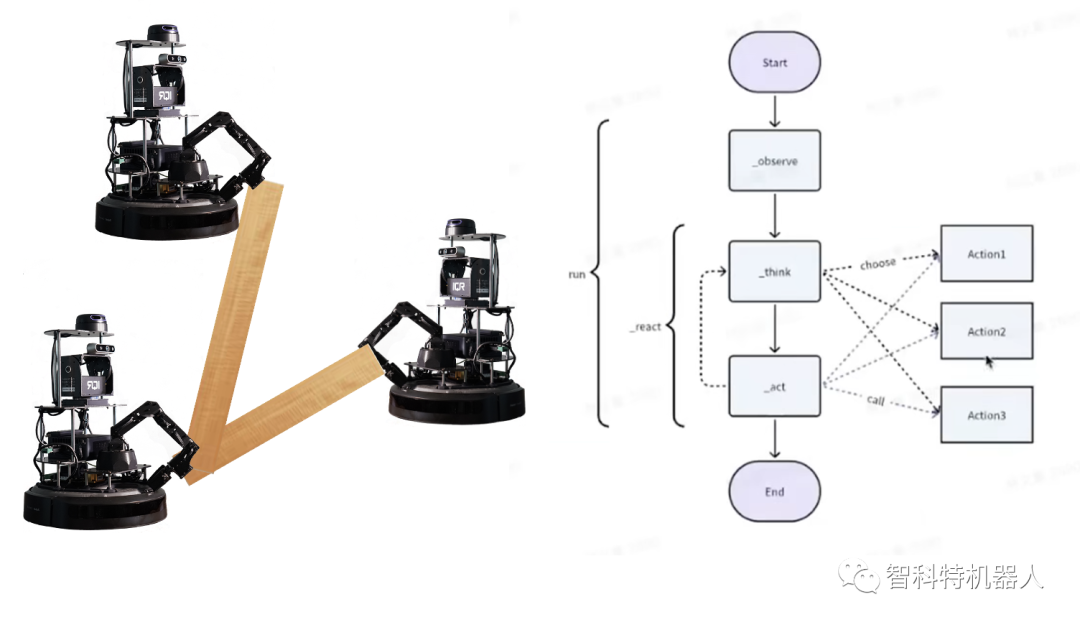
这机器人除了能用来教学,还能用在科研上,堪称一鸡两吃,譬如:
多智能体协同、地空协同、具身智能、机器人大模型等等。
最后,贴上全家福,大家感兴趣的欢迎来咨询并投喂

lite版本 | standard版本 | 全家桶版本 | |
底盘 | iRobotCreate3 | iRobotCreate3 | iRobotCreate3 |
机械臂 | / | / | 4自由度 |
激光雷达 | 思岚rplidarA1 | 思岚rplidarA1 | 思岚rplidarA2 |
深度摄像头 | OAK-D-LITE | OAK-D-PRO | realsenseD435i |
处理器 | 树莓派 | NUC | |
IMU | / | / | 9轴维特智能黄金版 |
分电板 | / | 有 | 有 |
机器人头部云台 | / | / | 有 |
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31402浏览量
223562 -
移动机器人
+关注
关注
2文章
819浏览量
34929 -
模型
+关注
关注
1文章
3811浏览量
52257
发布评论请先 登录
相关推荐
热点推荐
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
操作:完成毫米级、毫牛级任务
在精密装配、手术机器人等领域,扭矩传感器能分辨0.01牛米的力矩变化。例如,手术机器人缝合血管时,传感器实时反馈针尖穿刺组织的阻力,确保力度恰到好处,避免撕裂组织。
没有
发表于 04-17 17:27
Infineon移动机器人电机控制方案深度解析
Infineon移动机器人电机控制方案深度解析 在当今科技飞速发展的时代,移动机器人在物流、生产、服务等众多领域的应用日益广泛。电机控制作为移动机器人的核心技术之一,其性能直接影响着机器人
移动机器人“芯”引擎爆发,禾赛、海思新品逆袭
GGII预计,2025年中国移动机器人销量有望达到12.6万台,总量同比增长约12.7%。这也催生了对上游激光雷达的需求。本文将重点介绍智能物流体系中移动机器人的雷达性能要求和新品。

探索RISC-V在机器人领域的潜力
应用,特别是机器人操作系统领域的可行性。MUSE Pi Pro以其强大的K1 AI CPU和官方对主流开源软件栈的积极适配,成为了一个非常有吸引力的选择。
二、 硬件初窥:性能小钢炮
MUSE Pi Pro
发表于 12-03 14:40
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
、远程作业机器人、特种检测机器人· 多摄像头输入:通过多路摄像头无死角监控作业现场,实现精准操作与安全监控。· 多屏显示:将不同视角的画面、传感器数据、控制界面分别显示,帮助操作员远程
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
移动机器人技术的发展历程
本白皮书聚焦于移动机器人领域的进展与挑战,重点探讨三个核心主题:机器人运动控制、复杂环境中的感知与导航,以及在适应新任务时的模块化与灵活性。此外,文中还重点介绍了机器人系统从简单的固定机械臂到复杂人形
越疆第10万台机器人成功下线 越疆机器人成为首家出货量突破10万台的企业
据悉,越疆协作机器人生产基地第10万台机器人已经正式下线。这意味着越疆机器人成为首家出货量突破10万台的企业。 深圳市越疆科技股份有限公司成立于2015 年,由山东大学毕业研究生刘培超
工业机器人的特点
生产可以提高产品品质。通过设定相同的程序,机器人可实现重复操作,保证了产品的标准化;在精细化生产方面,工业机器人可实现低于0.1毫米的运动精度,可以完成精细的雕刻工作。提高产出
由于机器人
发表于 07-26 11:22
轮式移动机器人电机驱动系统的研究与开发
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间模型进行了分析和计算,研究和设计了自主移动机器人
发表于 06-11 14:30
第10万台机器人下线,普渡机器人领航全球服务机器人规模化量产
6月10日,在位于江苏盐城建湖的普渡超级工厂,深圳市普渡科技有限公司(简称“普渡机器人”)迎来了第10万台机器人的下线,标志着产品累计出货量达到10万台这一重要里程碑。这一成果不仅彰显了普渡在全球

盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
机场智能指路机器人主要依靠感知系统、定位系统、导航系统、智能交互系统和运动系统协同工作,来实现为旅客准确指路和提供服务的功能,以下是其详细工作原理:
感知系统
传感器类型 :机器人配备了多种传感器
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
出有用的信息,如障碍物的位置和形状。对于摄像头数据,可以使用 OpenCV 等图像处理库进行图像识别、目标跟踪等操作,为机器人的导航和决策提供支持。
运动控制:运动控制是机器人开发的核心内容之一。书中
发表于 04-27 11:24



评论