 机器人关节电机控制:精密、智能和协调的控制系统
机器人关节电机控制:精密、智能和协调的控制系统

机器人技术的迅猛发展已经在多个领域引起了革命性的变革,从制造业到医疗保健,再到日常生活。在机器人的运动控制中,伺服电机扮演着关键的角色,它们为机器人的关节提供了动力和精确的运动控制。
机器人关节伺服电机
机器人的关节伺服电机控制是一种先进的技术,依靠电机驱动器、控制算法来完成精确的电流和速度控制,来调整电机的运动,以确保所需的位置、速度和力矩。
随着控制技术和半导体技术的发展进步,伺服控制广泛运用于多种领域,常见如:机器人、机器狗、监控、云台、道闸机、缝纫机和玩具等,目前针对机器人伺服电机控制方案,提出了小型化、开发便捷化、高性价比等更高的设计要求。
FU63xx系列
机器人关节电机控制方案应用
直流无刷电机,因其使用寿命长、低噪声、高响应等优点,被作为高精度控制的首选电机。专注电机驱动控制芯片领域的峰岹科技,近期推出针对机器人关节电机的专用控制系列芯片FU63xx,将电机驱动、伺服控制和位置传感器都集成在一颗芯片当中,帮助开发者更简捷、高效的完成机器人关节电机控制方案。
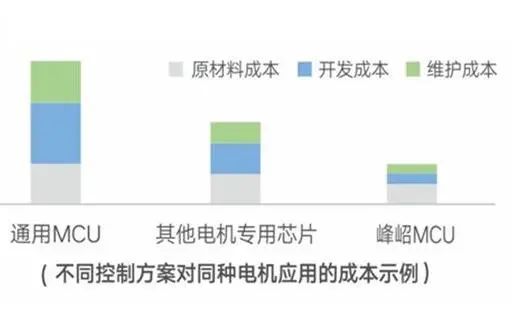
过去提到伺服控制,总和高精度、高技术、高成本分不开,随着应用要求提高,紧凑的设计和多功能集成已经成为未来趋势。峰岹FU63xx系列芯片内置:运放、运放放大电阻、LDO、Pre-Driver功能,更加简洁的电路设计,可减小控制板体积,适用于机器人各类关节电机及车轮电机,利于节约空间,便于集成化系统开发;其中FU6366芯片还集成了Can通信功能,满足机器人控制通信需求。
除了集成度高,FU63xx系列芯片采用双核设计,协同工作,实现各种高性能电机控制。其中8051内核进行常规事务处理,ME专用内核处理电机实时事务。芯片内部集成有乘/除法器、CRC、PI、角度换算和低通滤波器等常用硬件算法模块,可最大化加快程序运行速度。
角度传感器:
FU63xx系列关键集成技术
FU63xx系列芯片内置12位分辨率角度传感器,可以检测轴端磁铁产生的磁场,并转换为角度信号。为做到机器人关节精准控制和自适应调节,位置反馈系统作用十分重要,其可实时监测电机的位置和速度。内置以MR(磁阻传感器)技术为基础的角度传感器,拥有高灵敏度,宽磁场范围等特点,可以检测大于80Gs的磁场,抗杂散磁场能力强。通过感测电机的同轴磁铁获得电机角度,用于电机位置控制和角度计算。
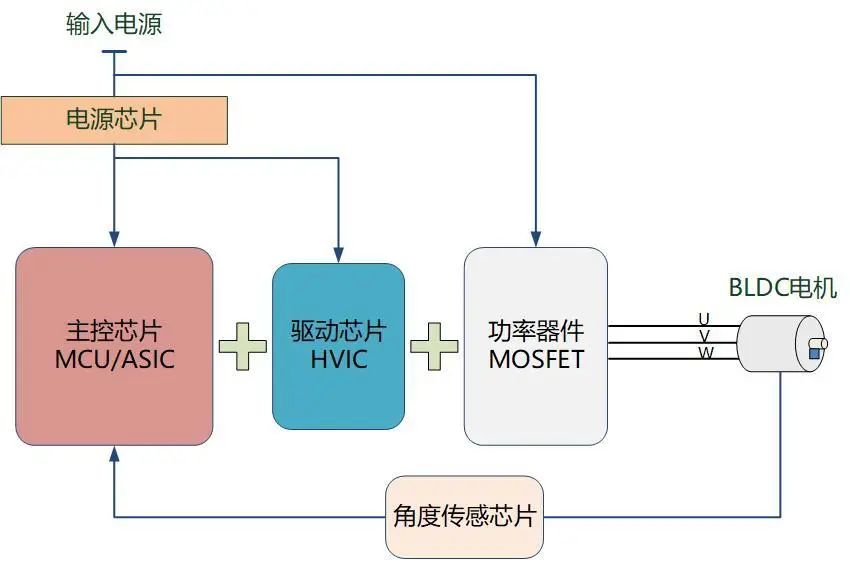
图:传统伺服电机控制系统构成示意
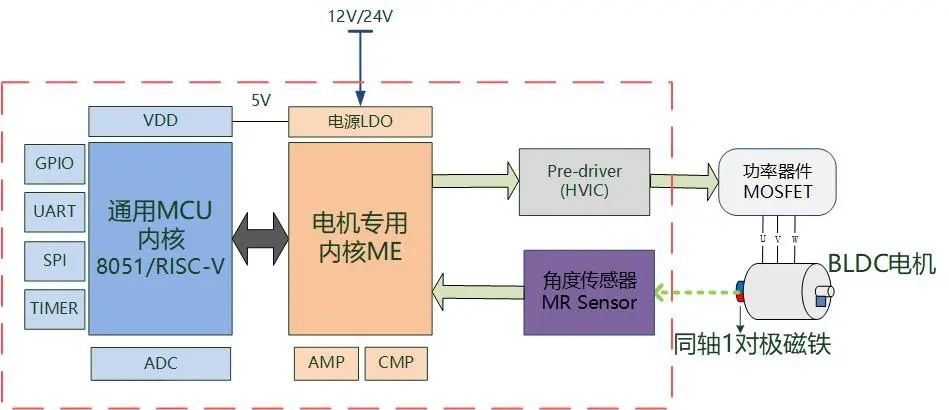
图:峰岹伺服控制高集成芯片示意图
FU63xx系列将角度传感器集成在主控芯片中,解决了传统伺服电机系统分离式角度传感器芯片的角度信息传输延迟问题,角度实时更新,反馈更加及时,系统响应更快,同时系统会根据每个应用进行精度的重新矫正,降低由于传感器安装偏差带来的精度影响。
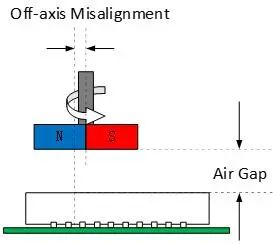
图:FU63xx系列芯片和磁铁的对应关系
精确控制
来自于核心伺服控制算法
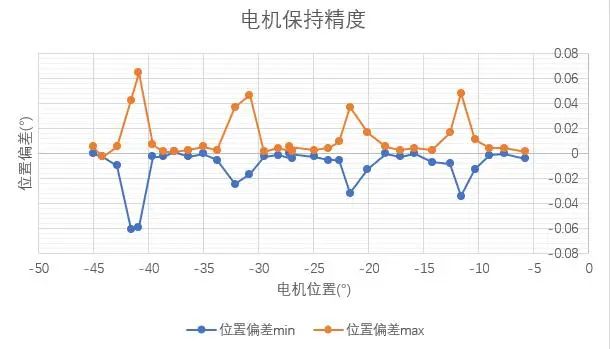
伺服电机可实现机器人的关节精确地定位和定向,其在高精度的任务需求中特别重要。峰岹科技拥有着多年伺服算法研发和应用经验,FU63xx系列芯片提炼了伺服运动控制算法核心(包括震动抑制,角度修正,轨迹规划等),经过精简压缩算法,提高了代码可读性和易用性,可广泛应用到多种位置控制和高响应伺服控制。如下为全范围段的电机保持精度测试,误差小于0.1°。
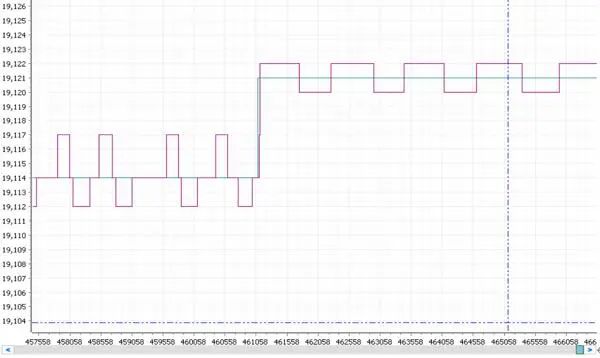
反馈跟踪给定速度快,跟踪误差小于5个单位,折算为度数0.03°
更广泛的
机器人伺服电机应用方案
FU63xx系列芯片除了应用在机器人、机器狗、监控、云台、道闸机、缝纫机、玩具上面之外,还可广泛应用于电动窗帘、自动门、舞台灯光、卷轴屏、汽车智能旋钮等场合
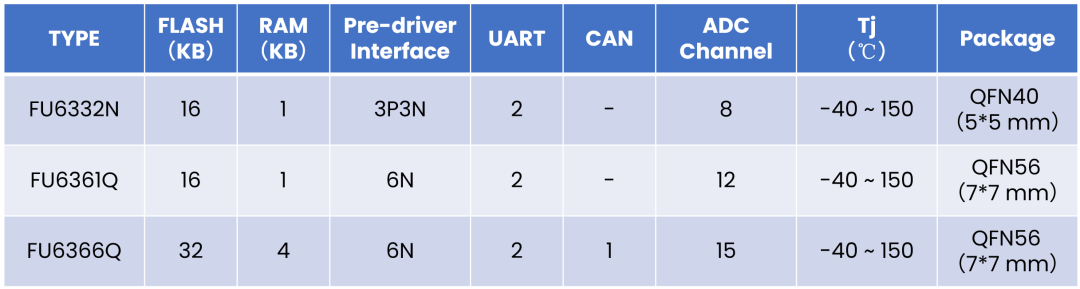
FU63xx系列应用选型
|
|
|
|
芯片 型号 | 适用 电压 | 适用 功率 | 应用特点 |
FU6361Q | 12-140V | <2000W | 云台、推拉门、监控摄像头、轮毂电机、舞台灯光、机器狗关节 支持串口、485、SPI通信等 |
FU6332N | 3-36V | <200W | 推拉门、轮毂电机、机器人关节 支持串口、485、SPI通信等 |
FU6366Q | 12-140V | <2000W | 机器人关节、伺服滑台 支持串口、485、spi、can通信等 |

FU63xx系列芯片选型
机器人运动关节伺服电机控制是机器人技术中至关重要的组成部分,它驱动了机器人的高精度、智能和协调运动。随着技术的不断发展,伺服电机控制将继续推动机器人在各个领域的应用,为人类创造更多的便利和可能性。运用先进的芯片技术和控制算法,我们可以期待看到更多创新和进步,使机器人变得更加灵活、高效和智能。
-
控制系统
+关注
关注
41文章
7004浏览量
114608 -
机器人
+关注
关注
214文章
31699浏览量
224670 -
电机
+关注
关注
145文章
9763浏览量
155117 -
制造业
+关注
关注
9文章
2551浏览量
57422
发布评论请先 登录
SiLM2035EF-7G 200V半桥驱动器,如何以DFN2×2极小封装赋能人形机器人关节电机?
人形机器人关节扭矩传感器的详细应用场景及解决方案

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
春晚机器人跳舞背后:精密关节连接器的“丝滑”秘密

机器人关节电机灌封解决方案 | EP 1720柔性环氧胶

SiLM2026EN-DG DFN3×3封装如何实现200V半桥驱动,为机器人关节电机注入高效动力?
扭矩之源:解析关节电机线圈如何实现机器人的柔顺运动

半桥驱动SiLM2026EN-DG DFN3x3小封装,轻松搞定200V机器人关节电机
采用DFN3×3封装SiLM2026EN-DG 200V半桥驱动器,如何实现机器人关节的高效紧凑驱动?
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
MCU微控制器,N32H47x高性能MCU机器人关节控制方案
人形机器人关节电机:永磁电机类型解析




评论