 柔性印刷石墨烯基电容式多传感器阵列,用于机器人对目标物体的认知抓取
柔性印刷石墨烯基电容式多传感器阵列,用于机器人对目标物体的认知抓取

随着现代机器人凭借先进的工程和智能技术不断发展,其应用范围不再局限于在重工业(例如汽车、航运等)、包装行业、制药行业、医疗辅助和保健服务行业以及其它复杂和专业领域中执行定制化任务,在办公事务和家务等各种任务的执行中也具有实用性。为了使机器人在家庭、工作场所和医疗辅助方面的应用多样化,机器人必须具备使用可靠、便携、经济高效、低功耗和用户友好的特性。由于机器人的应用旨在简化任务以改善人类生活,因此,具有认知决策能力的高效机器人将改变并丰富机器人在家庭、工作场所和其他辅助任务中的应用。
据麦姆斯咨询报道,为了给智能机器人提供一种无需用户认知确认的自动化方法,印度理工学院孟买分校(Indian Institute of Technology Bombay)的研究人员提出了一种喷墨打印的石墨烯基电容式多传感器阵列(CAPSENSAR),并将其用于认知机器人抓手(COGBOT)的认知决策任务,从而确保对目标物体的无滑移和抗损伤抓取。相关研究成果以“Cognitive gripping with flexible graphene printed multi-sensor array”为题,发表在Communications Engineering期刊上。
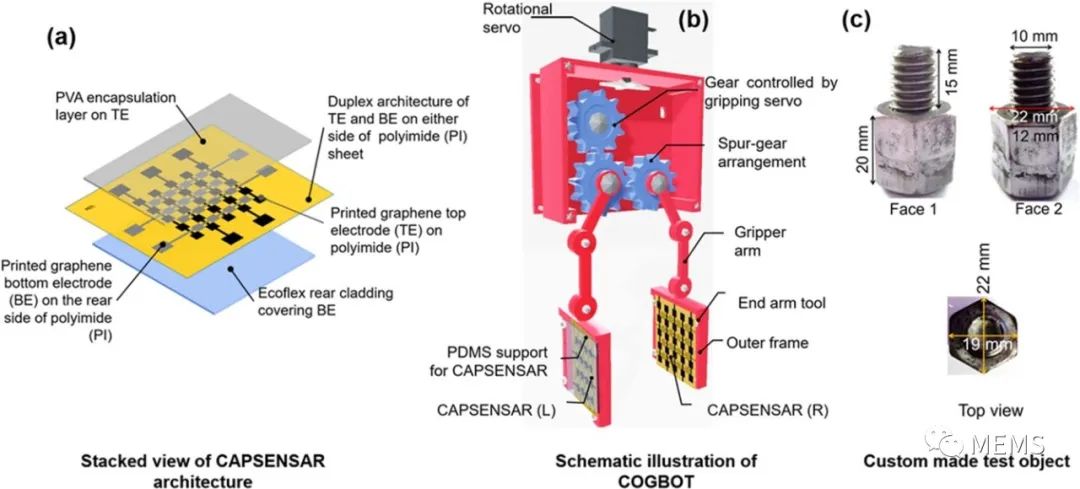
图1 认知机器人抓手(COGBOT)的组成和定制化测试对象的不同截面
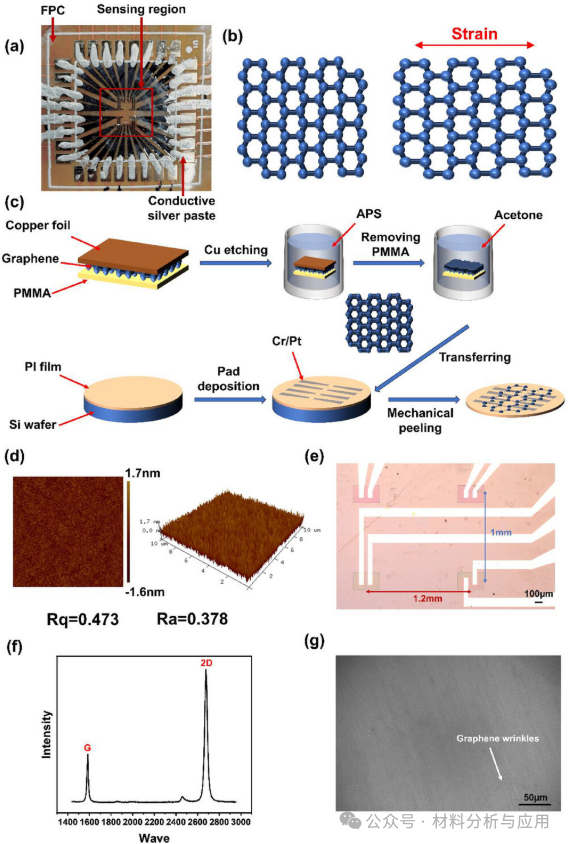
该电容式多传感器阵列由集成在机器人抓手的臂端工具对上的接近和压力传感器阵列和可编程控制单元组成,是在厚度为30 µm的可弯曲聚酰亚胺介电层/衬底两侧采用非重叠双面石墨烯印刷电极阵列制造的,可在3 cm范围内提供高灵敏度的电容式接近传感,并提供比先前报道的电容式接近传感器高3倍的动态传感范围。
此外,研究人员通过对电容式多传感器阵列的设计降低了认知机器人抓手的电学复杂性,其中,电容式接近和压力传感器单元使用相同的反馈电路与控制单元进行通信。基于阵列的接近传感器设计有利于目标物体表面三维形貌的生成,从而有助于机器人抓手端臂工具对之间的目标物体对面位置的估计和对准。在抓取操作阶段,利用与压力传感器操作时相同的传感阵列生成抓取区域物体表面的三维压力分布,从而检测物体因抓取而产生的滑移或损坏。利用这些认知数据,电容式多传感器阵列能够有效地抓取目标物体最平坦的一组对面,从而使得端臂工具无需复杂的设计即可执行精确的任务。
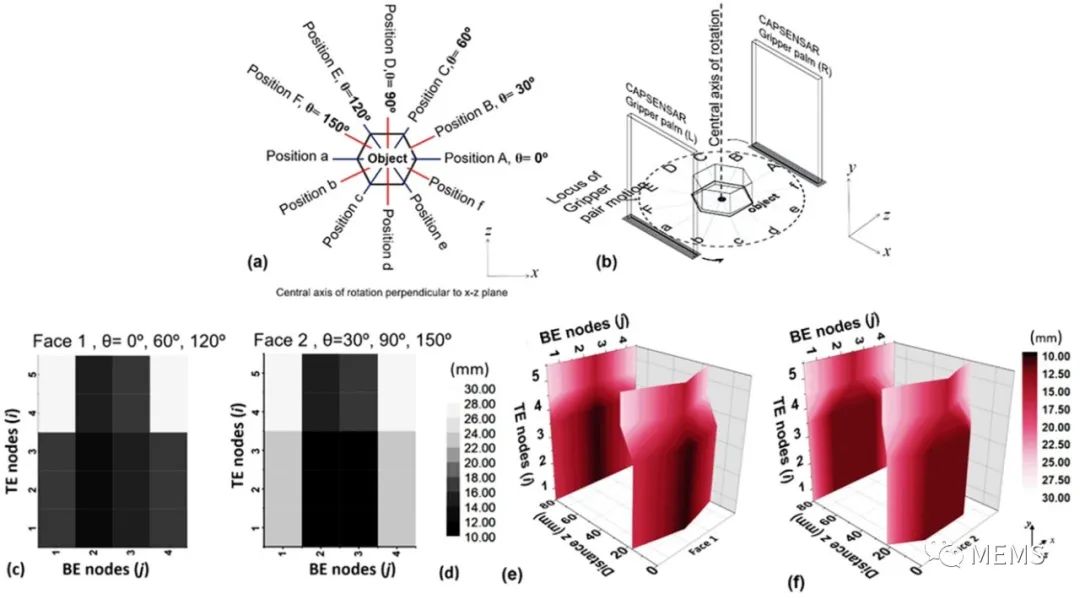
图2 对目标物体最平坦的一组对面的检测
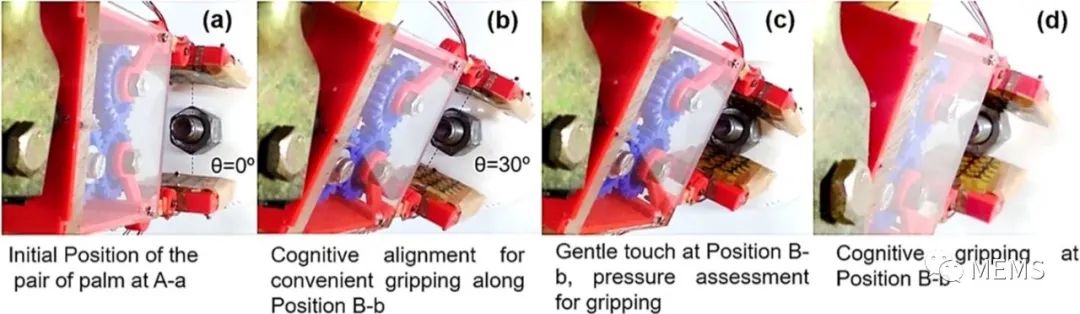
图3 认知机器人抓手认知抓取过程主要步骤的俯视图
认知机器人抓手的控制单元与可编程的防滑移和抗损伤算法相关联,从而分别防止了系统的不当操作和物体的变形。这种无滑移和无损坏的抓取操作是通过一系列步骤实现的,包括(a)测量对特定物体的最佳抓取力和(b)连续监测物体在抓取状态下的压力分布变化。因此,在抓取物体之前和之后用测量的最佳力确定抓取力的认知自动化方法,构成了一种有前途的无需人类认知的操作技术。
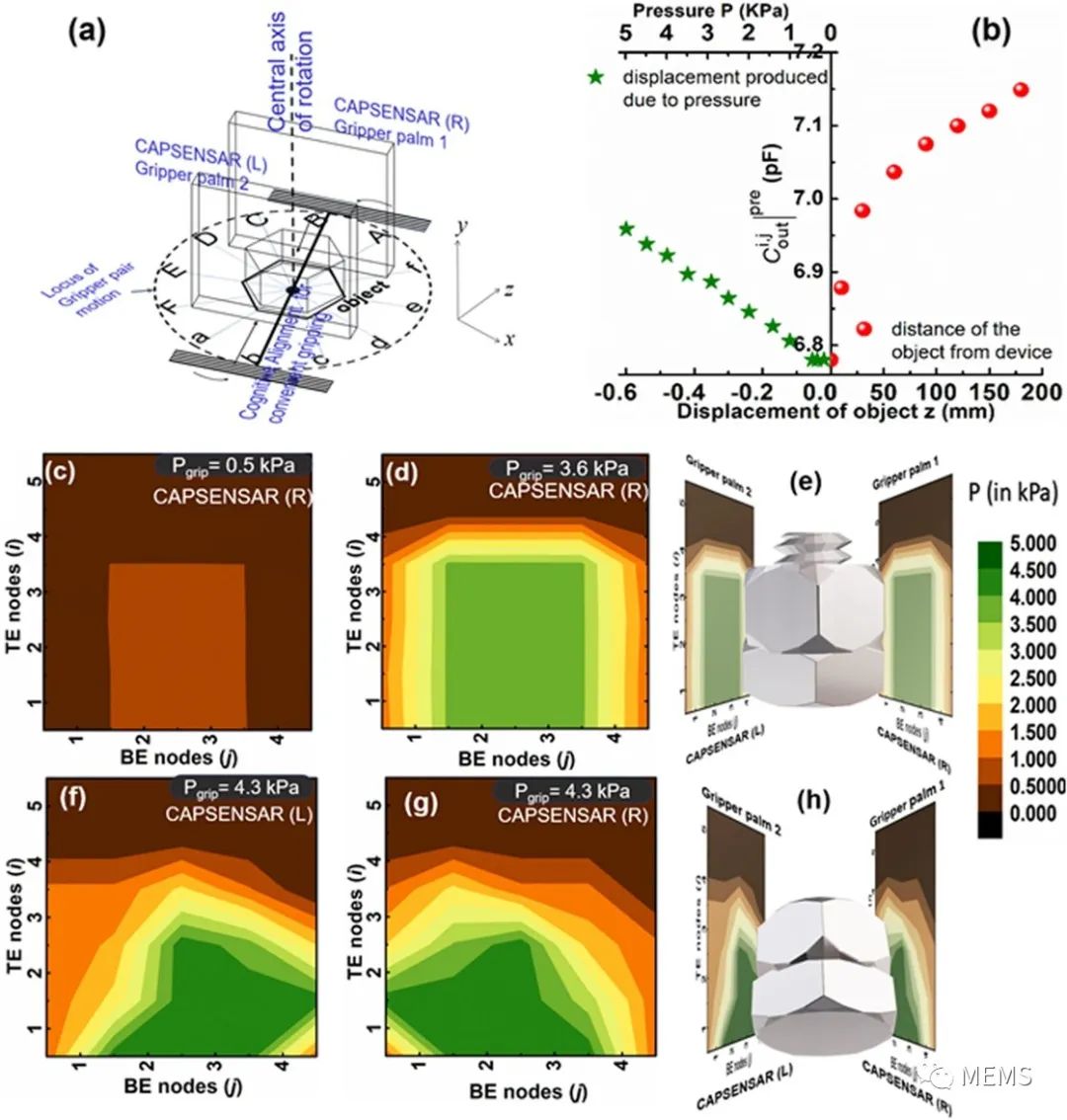
图4 安全抓握物体和防滑移操作
最后,该电容式多传感器阵列采用具有成本效益的材料以及无掩膜制造技术和可定制的电极设计,避免了由于印刷电极和电路而造成的可印刷油墨的浪费,使其具有快速生产和经济制造的商业可行性,可用于家庭家务、自动化机器人配送的医疗服务、机器人辅助餐饮服务和仿生手臂。
然而,尽管该认知机器人抓手具有各种优点,但它也有许多缺点,必须加以解决才能有效地使用。首先,虽然该电容式多传感器阵列的近距离传感器阵列在z < 30 mm时可以提供0.091 mm的高z轴分辨率,但其x-y平面度分辨率较低,为3 mm,并且随着z的增加而进一步恶化。因此,当距离该传感装置z > 60 mm时,电容式多传感器阵列可能会产生扭曲和模糊的物体电容映像。电容式多传感器阵列的x-y平面度分辨率受基本传感器单元尺寸a = 3mm和电极间距ζ = 3mm的限制,因此在形状检测过程中,尺寸< 3 mm的物体上的特征可能无法被清楚地区分出来,除非这些特征足够清晰,从而产生高的表面电荷密度。此外,虽然该研究所提出的电容式多传感器阵列是可弯曲的,但使用弯曲装置估计物体形状可能无法产生目标物体的正确形状,除非在测量期间重新校准该装置并纳入该装置的曲率。在抓取前确定物体的最合适的一组对面时,机器人手掌必须平行对准并相互面对,以确保安全抓取。此外,为了利用电容式多传感器阵列的运动检测能力,认知机器人抓手的未来研究工作将包括移动物体的操作。为此,必须改进检测的响应时间和程序中执行迭代周期所需的时间。
论文链接:
https://doi.org/10.1038/s44172-023-00095-y
-
传感器
+关注
关注
2578文章
55875浏览量
795700 -
电容
+关注
关注
100文章
6553浏览量
160479 -
机器人
+关注
关注
214文章
31682浏览量
224618 -
电容式
+关注
关注
0文章
392浏览量
55025 -
石墨烯
+关注
关注
54文章
1617浏览量
85513
原文标题:柔性印刷石墨烯基电容式多传感器阵列,用于机器人对目标物体的认知抓取
文章出处:【微信号:MEMSensor,微信公众号:MEMS】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
三维力传感器工作原理及应用领域是什么样的,在未来市场是占据怎么的地位?
人形机器人关节扭矩传感器的详细应用场景及解决方案
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取
陕西科技大学:研究用于人体监测和可穿戴舒适性的全功能皮革基柔性电容式压力传感器

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
安森美传感器芯片创新突破机器人感知边界
防水型气压传感器

力传感器在工业自动化机器人中的应用:精确抓取/装配作业/搬运作业/柔顺控制

电容式液位传感器和传统接触式液位传感器比有什么优势?
深圳技术大学:超薄石墨烯应变传感器阵列,用于毫米级分辨率的高灵敏度多功能传感
机器人领域中的温度传感器技术及其应用:机器人温度监测,提升机器人工作稳定性




评论