 伺服放大器的三种控制方式
伺服放大器的三种控制方式

来源:运控CMCIA
伺服的控制术语有很多:闭环控制、半闭环控制、开环控制,速度环、电流环、位置环,很多朋友相信没有弄清楚,今天就为大家详细解答一下,伺服的控制模式是怎样的,该怎样系统的掌握这一块。
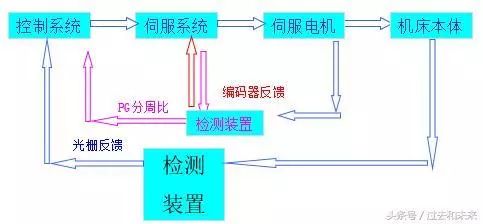
控制系统的控制类型
开环控制:没有检测装置,或者不反馈机床的位移量到控制器。就位置控制而言,指令信号形式多为pulse。
半闭环控制:检测装置安装伺服电机上,间接反馈机床的位移量到控制器,不考虑机械误差。
全闭环控制:检测装置安装机床本体上,直接反馈机床的位移量到控制器。
后二者,就位置控制而言指令信号形式多为模拟量电压。
控制模式种类:
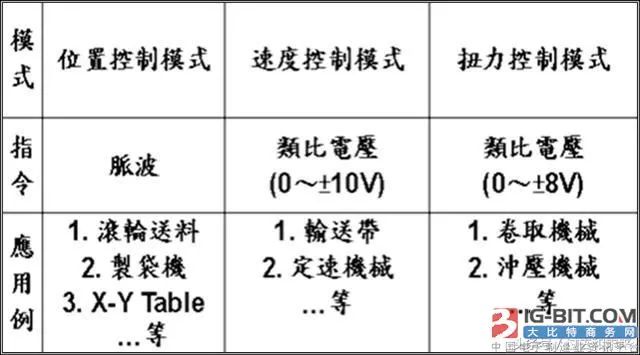
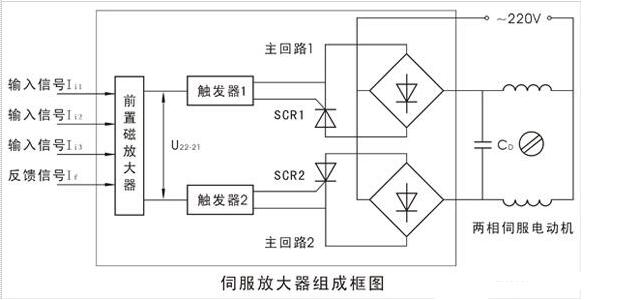
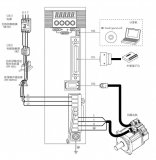
伺服放大器三种控制方式
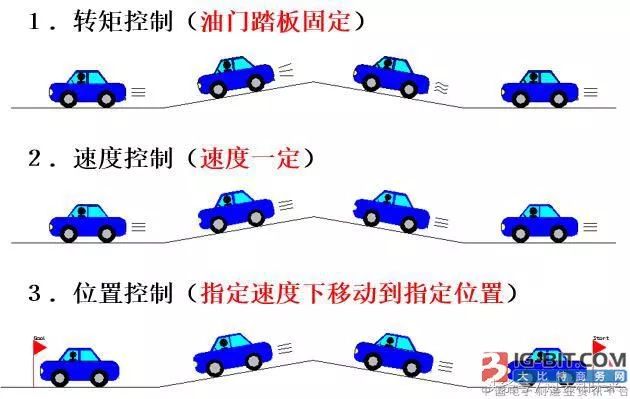
1.转矩控制:通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,主要应用于需要严格控制转矩的场合。——电流环控制
2.速度控制:通过模拟量的输入或脉冲的频率对转动速度的控制。——速度环控制
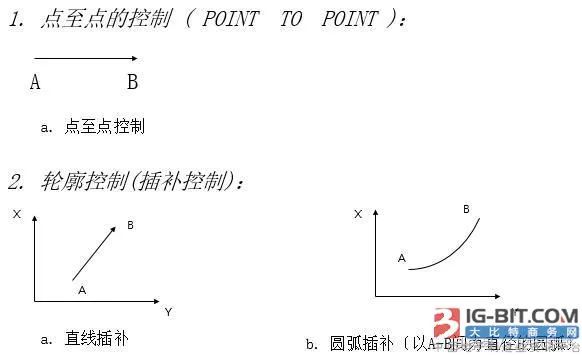
3.位置控制:伺服中最常用的控制,位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,所以一般应用于定位装置。——位置环控制
位置控制模式
位置控制的区分:
1.半闭回路控制Ⅰ「马达轴端检出」
2.半闭回路控制Ⅱ「减速机端检出」
3.全闭回路控制「机械位置检出」
使用AC伺服马达用于位置控制,一般是指由与伺服马达轴心一体化的位置检出器 (编码器、角度检测器等) 取得回授讯号,当与位置指令量一致时,使马达轴停止之控制,并执行伺服锁定之机能(SERVO LOCK)。
适用于位置控制
AC 伺服马达用于位置控制,以用途分别可区分为2大项
位置环的作用:
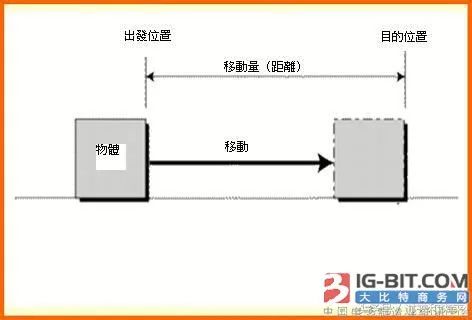
定位指令通常以脉冲列形式输入,脉冲总数为定位量,定位速度是单位时间(秒)的脉冲量。(PPS:Pulse/Second)
输入的脉冲量与反馈的脉冲数量相一致时,这才实现定位完了。
在位置控制部中,因为有输入脉冲的加算、反馈脉冲的减算,所以有一个计数器。(也称偏差计数器)
位置控制时:工控机及上位控制器发出位置指令信号,脉冲+方向,送入脉冲列,经伺服电子齿轮分频后,在偏差可逆计数器中与反馈脉冲信号比较后形成偏差信号,反馈脉冲是由光电编码器检测到电机实际所产生的脉冲数。经四倍频后的,位置偏差信号经位置环的复合前馈控制器调节后,形成速度指令信号,速度指令信号与速度反馈信号比较后的偏差信号经速度环比例积分控制器调节后产生电流指令信号,在电流环中经矢量变后,由SPWM输出转矩电流,控制交流伺服的运行,位置控制精度由光电编码器每转产生的脉冲数控制,有绝对与增量两种,增量的易于掌握,平均寿命长,分辨率高,但断电后无保持。
速度控制模式
AC伺服马达与其它一般的可变速装置:(变频器、直流马达等)一样,运转速度可变换。其特长:
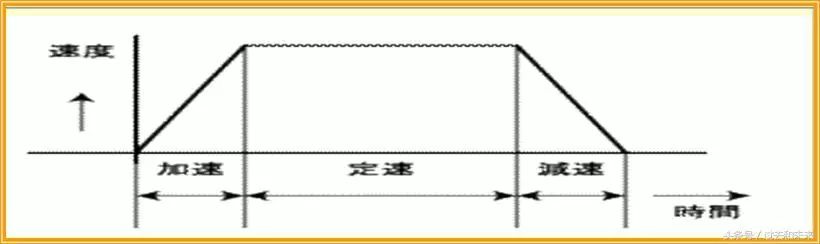
a.缓起动、停止机能:加减速时产生的冲击,加速及减速的变动率。
b.广大的速度控制范围:从低速至高速之间的控制范围(1:1000 ~ 5000)速度控制范围内、定转矩特性。
c.速度变动率小:即使负载变动,速度依然不会有太大的改变产生。
转矩控制模式
AC伺服马达以电流做高精度的输出转矩控制。一般的用途为位置控制或速度控制时依速度偏差的结果所做电流控制。或由外部直接控制电流值、亦可控制马达的输出转矩如绞布机械等张力控制即可运用。
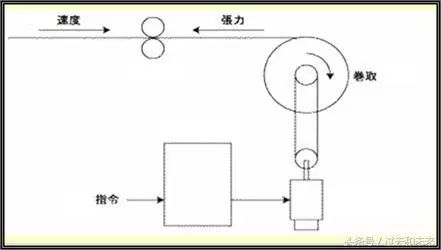
A.张力控制时,卷取的滚轮半径越大时、负载转矩相对增加。伺服马达的输出转矩相对增加。
B.卷取途中材料切断时,负载瞬间变轻,但马达高速回转,此时伺服马达的输出转矩减少。
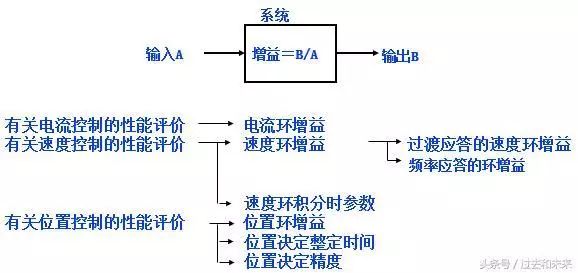
伺服的性能评价(增益调整)
评价伺服的应答性,指令输入后输出的情况(电机如何转动),使用回路增益这个用语就是GAIN,获得和利益的意思,是输入和输出之比所解释的技术术语,现在直接使用增益来表示。伺服增益是一种最简单的控制方式。其控制器的输出与输入误差信号成比例关系。
机械本身的结构对伺服增益的调整有重要影响,如果机械本身的刚性比较好(磨床丝杆传动),伺服的相关增益则可以设置较高。如果机械本身的刚性偏柔(料道同步带),伺服的相关增益则设置的不要太高。
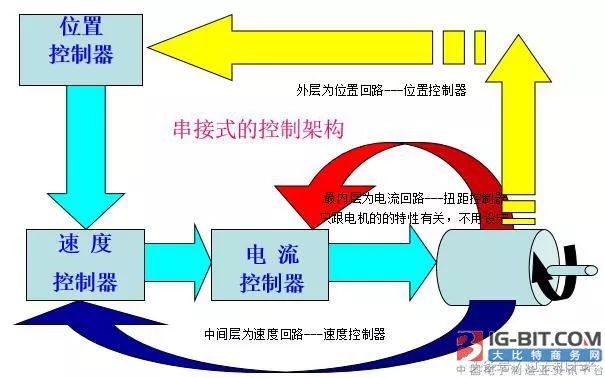
伺服速度、位置增益参数关系及总的调试思路:最内环(电流环)的反应速度最快,中间环节(速度环)的反应速度必须高于最外环(位置环)。如果不遵守此原则,将会造成电机运转的震动或反映不良。伺服驱动器的设计可尽量确保电流环具备良好的反应性能,故用户只需调整位置位置环、速度环的增益即可。
位置环的反应不能快于速度环的反应。因此,若需增加位置环的增益,必须先增加速度环的增益。如果只增加位置环的增益,电机很可能产生震动,从而将会造成速度指令及定位时间的增加,而非期望的减少。
速度环增益
增大速度环比例增益,则能降低转速脉动的变化量,提高伺服驱动系统的硬度,保证系统稳态及瞬态运行时的性能。但是在实际系统中,速度环比例增益不能过大,否则将引起整个伺服驱动系统振荡。
速度环参数调节与负载惯量的关系:
当负载对象的转动惯量与电动机的转动惯量之比较大,以及负载的摩擦转矩比较大时,宜增大速度环比例增益和速度环积分时间常数,以满足运行稳定性的要求。
当负载对象的转动惯量与电动机的转动惯量之比较小,以及负载的摩擦转矩较小时,宜减小速度环比例增益和速度换积分时间常数,保证低速运行时的速度控制精度。
位置环增益
位置环增益与伺服电机以及机械负载有着密切的联系,通常伺服系统的位置环增益越高,电机速度对于位置指令响应的延时减小,位置跟踪误差愈小,定位所需时间 越短,但要求对应的机械系统的刚性与自然频率也必须很高。而且当输入的位置突变时,其输出变化剧烈,机械负载要承受较大的冲击。此时,驱动器必须进行升降 速处理或通过上位机用编程措施来缓冲这种变化。
当伺服系统位置环增益相对较小时,调整起来比较方便,因为位置环增益小,伺服系统容易稳定,对大负载对象,调整要简单些。同时,低位置环增益的伺服系统频 带叫窄,对噪音不敏感。因此,作为伺服进给用时,位置的微观变化小,但低位置环增益的伺服系统位置跟踪误差较大,进行轮廓加工时,会在轨迹上形成加工误差。

1.相对运动:必需对位置值加以计算,点动运行、往返运动一定位置量的控制系统。
2.绝对运动:直接下达位置值,可用于XY轴、table等,一般的机械均可使用。于指令程序中较为简便。
审核编辑:汤梓红
-
伺服系统
+关注
关注
14文章
594浏览量
41521 -
伺服放大器
+关注
关注
3文章
43浏览量
14469 -
伺服马达
+关注
关注
0文章
24浏览量
8103 -
控制系統
+关注
关注
0文章
32浏览量
2918
原文标题:伺服系统的三大控制模式与性能评价
文章出处:【微信号:旺材伺服与运动控制,微信公众号:旺材伺服与运动控制】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
回收三菱伺服放大器回收松下伺服控制器
一种智能型伺服放大器的设计
伺服放大器的原理图解,伺服放大器原理图、参数要求及其输出电流的计算

一文告诉你为什么伺服放大器前要用电抗器
力矩放大器的控制方式及安装方法
伺服放大器有什么作用

日本电产三协推出可支持AC伺服电机的“S-FLAGⅡ”AC伺服放大器

伺服放大器的三种控制方式和接线要点





 工商网监
工商网监
评论