 I2C控制器驱动介绍
I2C控制器驱动介绍

控制器驱动
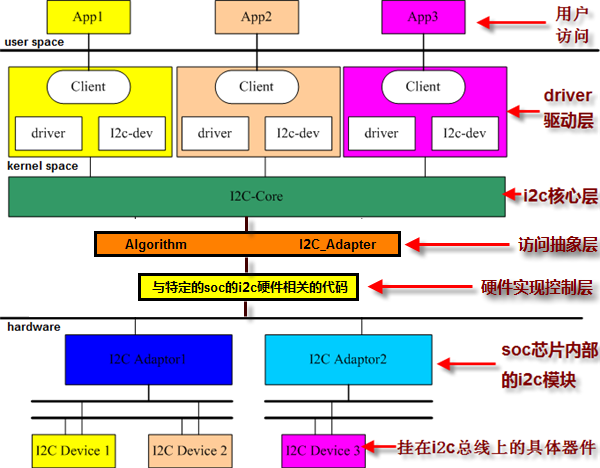
I2C 总线驱动重点是 I2C 适配器驱动,这里要用到两个重要的数据结构:i2c_adapter 和 i2c_algorithm。其中,Linux 内核将 SOC 的 I2C 适配器(控制器)抽象成 i2c_adapter。
对于一个 I2C 适配器,肯定要对外提供读写 API 函数,设备驱动程序可以使用这些 API 函数来完成读写操作。i2c_algorithm 就是 I2C 适配器与 I2C 设备进行通信的方法。
I2C 总线驱动,或者说 I2C 适配器驱动的主要工作就是初始化 i2c_adapter 结构体变量,然后设置 i2c_algorithm 中的 master_xfer 函数。完成以后通过 i2c_add_numbered_adapter 或 i2c_add_adapter 这两个函数向系统注册设置好的 i2c_adapter。
I2C 控制器驱动加载
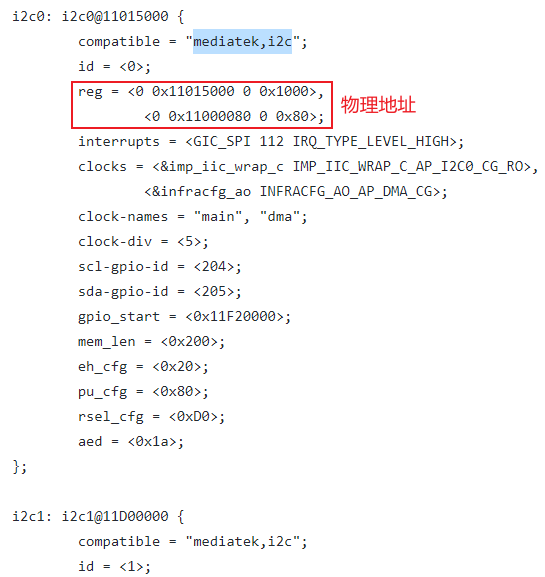
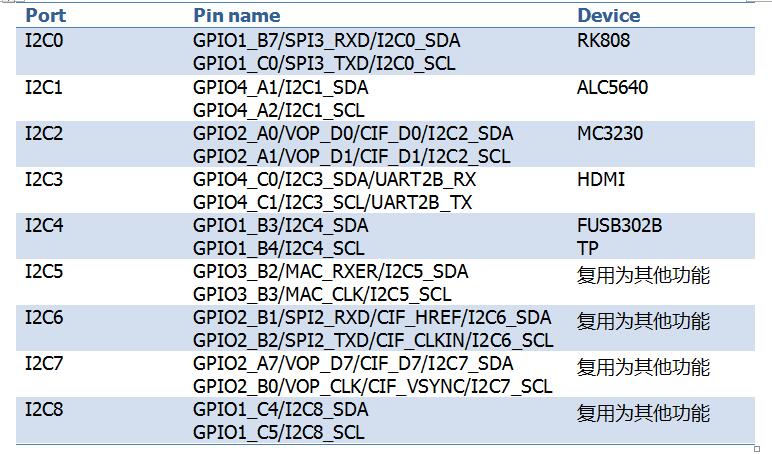
设备树 mt6885.dts
驱动
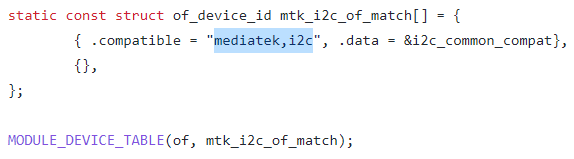
驱动和设备树匹配以后,probe 函数开始执行,重要的地方博主都进行了注释,不重要的部分进行了删除。
static int mt_i2c_probe(struct platform_device *pdev)
{
int ret = 0;
struct mt_i2c *i2c; //控制器结构体
unsigned int clk_src_in_hz;
struct resource *res;
const struct of_device_id *of_id;
//申请内存
i2c = devm_kzalloc(&pdev- >dev, sizeof(struct mt_i2c), GFP_KERNEL);
//获取设备树节点
ret = mt_i2c_parse_dt(pdev- >dev.of_node, i2c);
//从设备树获取 I2C 控制器寄存器物理基地址
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
//进行内存映射,得到 Linux 内核使用的虚拟地址
i2c- >base = devm_ioremap_resource(&pdev- >dev, res);
.....
//获取中断号
i2c- >irqnr = platform_get_irq(pdev, 0);
init_waitqueue_head(&i2c- >wait);
//请求中断,中断服务函数为 mt_i2c_irq
ret = devm_request_irq(&pdev- >dev, i2c- >irqnr, mt_i2c_irq,
IRQF_NO_SUSPEND | IRQF_TRIGGER_NONE, I2C_DRV_NAME, i2c);
of_id = of_match_node(mtk_i2c_of_match, pdev- >dev.of_node);
//填充 adapter 结构体各个参数
i2c- >dev_comp = of_id- >data;
i2c- >i2c_pll_info = &i2c_pll_info;
i2c- >adap.dev.of_node = pdev- >dev.of_node;
i2c- >dev = &i2c- >adap.dev;
i2c- >adap.dev.parent = &pdev- >dev;
i2c- >adap.owner = THIS_MODULE;
i2c- >adap.algo = &mt_i2c_algorithm;
i2c- >adap.algo_data = NULL;
i2c- >adap.timeout = 2 * HZ;
i2c- >adap.retries = 1;
i2c- >adap.nr = i2c- >id;
spin_lock_init(&i2c- >cg_lock);
......
mutex_init(&i2c- >i2c_mutex);
ret = i2c_set_speed(i2c, clk_src_in_hz);
ret = mt_i2c_clock_enable(i2c);
mt_i2c_init_hw(i2c);
mt_i2c_clock_disable(i2c);
// DMA 相关
if (i2c- >ch_offset_default)
i2c- >dma_buf.vaddr = dma_alloc_coherent(&pdev- >dev,
(PAGE_SIZE * 2), &i2c- >dma_buf.paddr, GFP_KERNEL);
else
i2c- >dma_buf.vaddr = dma_alloc_coherent(&pdev- >dev,
PAGE_SIZE, &i2c- >dma_buf.paddr, GFP_KERNEL);
if (i2c- >dma_buf.vaddr == NULL) {
dev_info(&pdev- >dev, "dma_alloc_coherent failn");
return -ENOMEM;
}
i2c_set_adapdata(&i2c- >adap, i2c);
//向 Linux 内核注册 i2c_adapter
ret = i2c_add_numbered_adapter(&i2c- >adap);
platform_set_drvdata(pdev, i2c);
return 0;
}
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
控制器
+关注
关注
114文章
17859浏览量
195014 -
驱动
+关注
关注
12文章
1988浏览量
88683 -
I2C
+关注
关注
28文章
1562浏览量
131699
发布评论请先 登录
相关推荐
热点推荐

GPIO模拟I2C总线的驱动设计与实现
I2C总线简单方便,是我们经常使用的一种总线。但有时候我们的MCU没有足够多的I2C控制器来实现我们的应用,所幸我可以使用普通的GPIO引脚来模拟低速的I2C总线通信。这一节我们就来实
发表于 12-14 14:19
•6509次阅读
实现I2C总线控制器的VHDL源代码
I2C总线控制器 altera提供
The I2C Controller was designed for the MC68307 uC, provides a simplified
发表于 05-20 10:25
•251次下载
I2C总线在Linux系统中的驱动设计
介绍I2C总线的基本概念和工作原理,叙述I2C总线扩展器件ZLG7290的功能特点。在以S3C2410为微控制器,ZLG7290为
发表于 12-29 16:52
•40次下载
基于Verilog的I2C控制器的设计与综合
为满足嵌入式系统中专用芯片功能不能达到系统要求的现状,设计出一种功能可扩展的I2C slave控制器,这种控制器与传统的专用I2C芯片不同。专用的I
发表于 10-25 16:58
•60次下载

I2C总线控制器的工作原理及EEPROM的Linux驱动程序的设计
I2C (Inter-Integrated Circuit1总线是一种由Philips公司开发的2线式串行总线,用于连接微控制器及其外围设备。它是同步通信的一种特殊形式,具有接口线少、控制
发表于 10-26 15:37
•7次下载

Linux驱动:I2C设备驱动(基于Freescale i.MX6ULL平台了解I2C的驱动框架,顺便写个简陋的MPU6050驱动)
I2C总线驱动加载到内核的过程3.2 I2C总线驱动如何操作硬件3.3 I2C设备 <----->
发表于 12-06 13:51
•8次下载

嵌入式内核及驱动开发-09IIC子系统框架使用(I2C协议和时序,I2C驱动框架,I2C从设备驱动开发,MPU6050硬件连接
从设备adapter i2c 控制器对象数据包对象读写数据设备树中添加MPU6050信息内核选配添加设备树节点编写驱动程序 mpu6050_i2c_drv.cI2c协议和时序
发表于 12-06 14:06
•17次下载
linux移植MPU6050的I2C驱动
有MPU6050的例程,测试后很好用,如下图(梦幻联动一下:树莓派PICO+freeRTOS)因为pico上有现成的能用的例程,所以改一改之后直接移植到linux上首先介绍一下linux下的I2C框架①、I2C 总线
发表于 12-06 14:21
•10次下载
I2C子系统SW Architecture
适配器(控制器)驱动,这里用到两个重要的数据结构:i2c_adapter 和 i2c_algorithm。其中,Linux 内核将 SOC 的 I



评论