 泰科智能MJX系列关节模组助力机器人弹钢琴
泰科智能MJX系列关节模组助力机器人弹钢琴

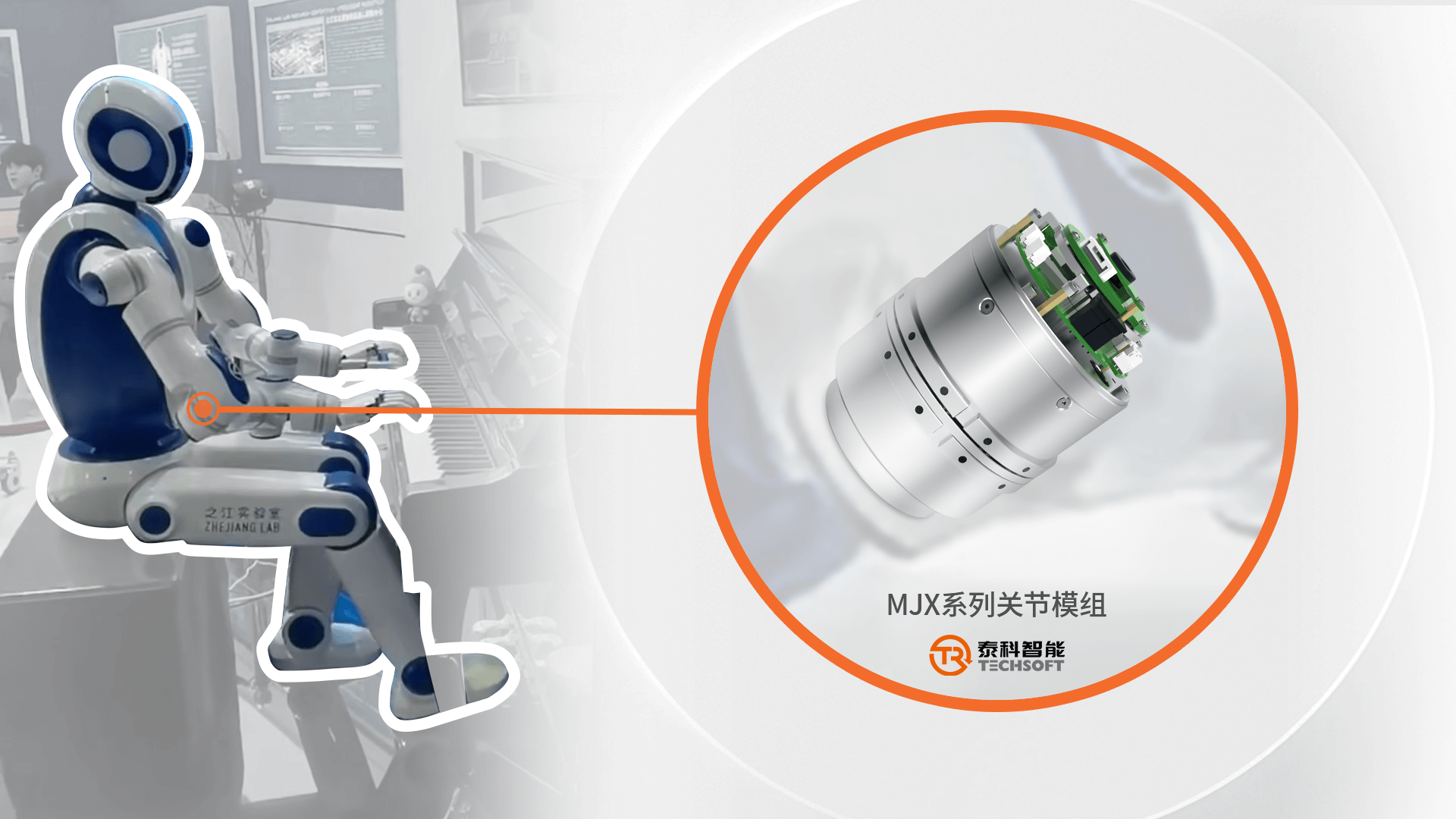
5月24日,第八届中国机器人峰会暨智能经济人才峰会上,之江实验室展示的机器人“晓乐”,手指灵巧地在黑白键上跳跃,手脚并用,旋律从钢琴中悠扬而出,特别吸引观众眼球。据工作人员介绍,目前“晓乐”可以熟练弹奏30多首曲子,水平相当于钢琴五级。
 “晓乐”机器人关节模组示意
“晓乐”机器人关节模组示意
“晓乐”机器人双臂、脚、头部及主体各关节的灵活运动,共由19个泰科智能MJX系列关节模组提供精准稳定的控制,各关节模组根据各个弹奏任务的要求进行精确的角度旋转和速度调整,从而使弹出优美的旋律。
 泰科智能机器人MJX系列关节模组
泰科智能机器人MJX系列关节模组
深圳泰科智能机器人作为国内为数不多的关节模组研发及生产厂家,一直致力于为企业提供更多协作机器人关节模组解决方案。自主研发的MJX系列关节模组,高度集成模块化、紧凑型设计,有多种规格尺寸。整个系列关节模组自重轻,体积小,采用高精度双编码器,重复定位精度可达±0.015°,平均负载转矩可达30 N.m,并内置抱闸,可以瞬间进行安全制动。使用此系列关节模组可快速组装轻量且大负载的小型协作机器人。
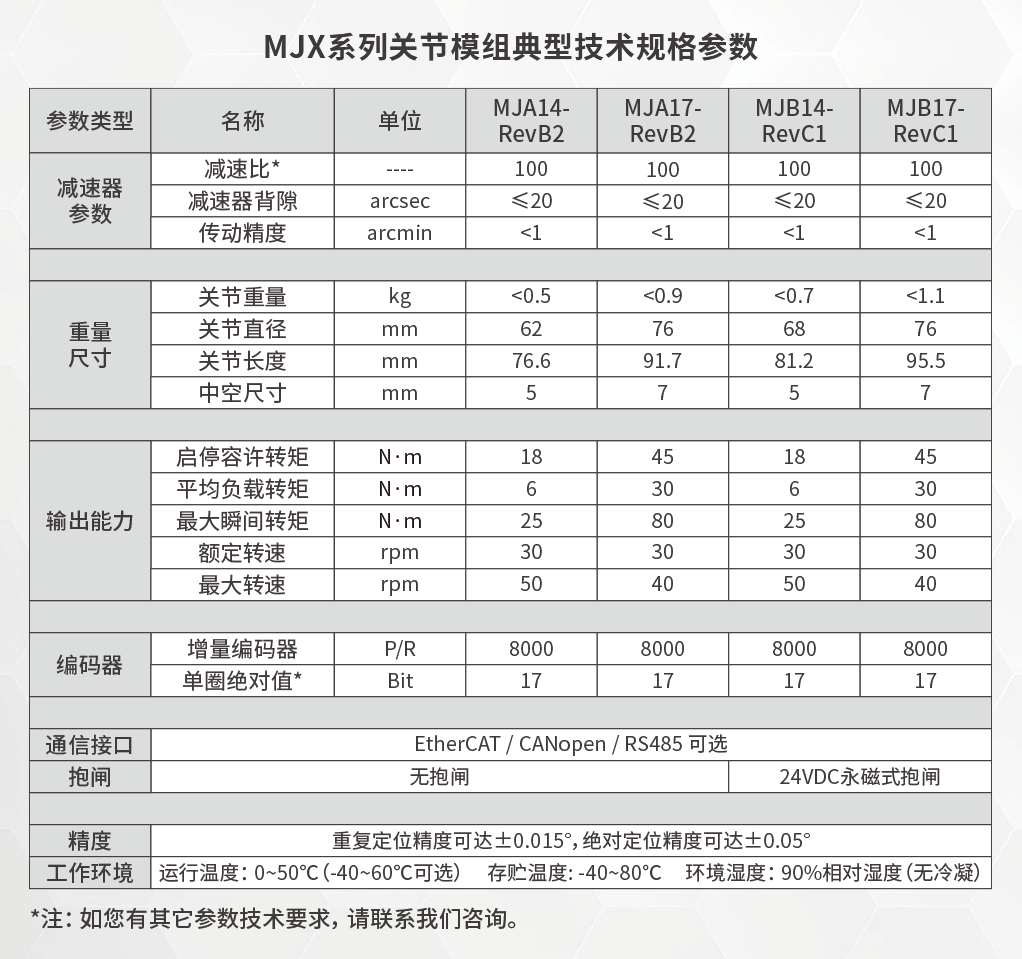 MJX系列关节模组参数
MJX系列关节模组参数
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31634浏览量
224480 -
模组
+关注
关注
6文章
1812浏览量
32408
发布评论请先 登录
相关推荐
热点推荐
人形机器人关节扭矩传感器的详细应用场景及解决方案
传感器,集成谐波减速器型,量程±85Nm,过载500%。
宇立仪器(SRI):JTS系列,中空法兰结构,用于髋/膝大扭矩关节。
力晟传感:TD系列,小型化轴式,适用于机器人
发表于 05-20 17:40
具身智能核心执行器:人形机器人关节模组核心技术与工程化落地
全面解析人形机器人关节模组核心技术架构:无框力矩电机+谐波减速器+双绝对值编码器集成方案,覆盖扭矩密度、动态响应、热管理等工程化落地要点。泰科

突破技术壁垒!泰科机器人凭借核心零部件创新能力荣获广东省“专精特新”中小企业认定!
泰科机器人凭借在人形机器人关节模组、伺服驱动器等核心零部件领域的自主创新能力,成功获评广东省“专

FAIR plus机器人链接会 | 匠芯创M7000系列赋能机器人精准智控
产业链,推动机器人智能化升级。匠芯创携M7000系列工业级高性能DSP实时处理器,以及基于M76H06系列开发的EtherCAT关节

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
:高端传感器扭矩分辨率达0.001牛米,力控精度±0.5%。
应用:特斯拉Optimus人形机器人全身搭载40个以上关节扭矩传感器;优必选Walker、傅利叶智能等国产机器人也已全面采
发表于 04-17 17:27
从“能动”到“好用”,人形机器人关节模组决定性能,也决定未来
关节模组是机器人的“运动枢纽”, 连接并驱动各个部件,实现流畅的运动。根据机械工程原理,关节模组的关键在于将电能转化为机械运动,并且确保精确

高性能人形机器人关节模组选型的关键技术要素
人形机器人关节模组一般是集传动装置、驱动器、电机、抱闸、编码器以及力矩传感器等于一体的精密部件,负责驱动和控制人形机器人各个关节精确实现拟人

昆泰芯高速磁编码器实现机器人关节双端测量
昆泰芯KTM59/KTH71系列磁编码器凭借高精度(24位分辨率)、高速响应与强抗干扰能力,为机器人关节提供双端角度检测,实现从动力输入到动作输出的全链路精准控制。



基于MT6816单芯片磁编码的机器人关节模组一体化设计
随着机器人技术的快速发展,关节模组的性能直接决定了机器人的运动精度和响应速度。传统的光电编码器虽然精度较高,但在抗污染、抗振动等方面存在明显短板。本文将详细介绍一种基于MT6816单芯
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
帮助机器人实时修正重心,大幅降低翻倒风险。
在关节运动控制上,磁传感器芯片实现 “毫米级精度保障”。以昆泰芯 KTM59 系列磁编码器的离轴应用为例,其非接触式磁信号捕捉技术,解决了
发表于 08-26 10:02
集成MT6701磁编芯片的机器人关节模块化设计与驱动优化
随着机器人技术的快速发展,关节模块作为机器人的核心执行单元,其性能直接决定了机器人的运动精度和响应速度。近年来,磁编码器因其非接触式测量、高分辨率、强抗干扰能力等优势,逐渐成为

蓝思科技:今年承接智元机器人全系列多款人形机器人业务
思科技表示,公司在 2016 年即成立智能机器人公司,研发和大规模量产工业机器人、机械臂、灵巧手。2024 年迅速与国内外头部人形机器人公司合作,量产人形
MT6701磁编芯片:引领机器人关节控制智能化新潮流
无疑是关键中的关键。今天,我们就来聊聊一款能够助力机器人关节控制迈向智能化时代的神器——MT6701磁编芯片。



评论