 虹科案例 | EtherCAT协议在涂胶机器人控制系统的应用
虹科案例 | EtherCAT协议在涂胶机器人控制系统的应用

行业背景
涂胶机在圆晶制造前道工艺中是光刻工艺重要环节的设备,在后道工艺中主要应用封装技术的涂胶等工序。涂胶机上的控制系统一般具有非线性和多入多出的特征,而且对系统响应的要求也比较高。一个涂胶机器人的各个涂胶的伺服单元要同时具有联动和独立运动的功能。
通过EtherCAT技术和虹科KPA Automaotion softPLC技术的接合,可以解决机器人各个涂胶的强耦合问题,同时,可以通过现代先进的工业计算机技术,解决高精度的复杂算法难以在运动控制卡上实现较高实时性的问题。
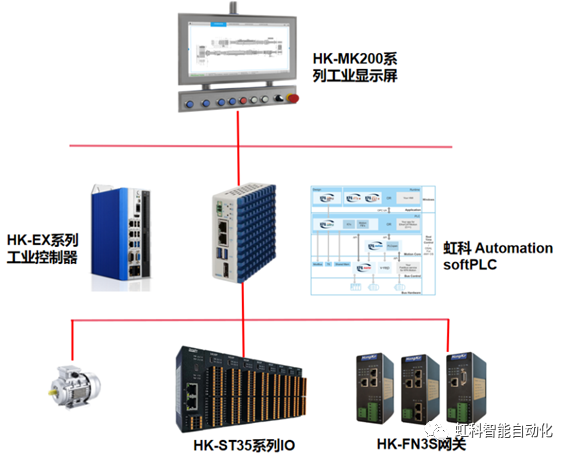
基于虹科EtherCAT软PLC和IO模块的控制系统
本文的控制系统基于EtherCAT 体系下虹科的HK-EX工业控制器和AutomationsoftPLC实现,与传统工业现场采用的三菱、西门子PLC 不同,虹科KPA AutomationsoftPLC具备更高的编程灵活性,对复杂动作的兼容性更强,因而更为适合涂胶和机器人应用。
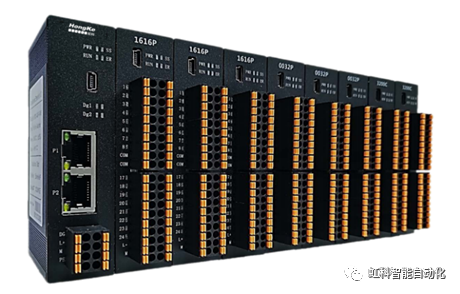
虹科HK-ST35系列耦合器式EtherCAT IO
虹科HK-ST35 系列分布式总线IO模块,着力于为工业自动化现场提供开关量、模拟量的采集和输出功能,支持DI、DO、AI、AO、 高速计数、热电阻、热电偶等信号类型,支持 PROFINET、ETHERCAT、ETHERNET/IP、CCLINK IE FIELD BASIC、MODBUS-TCP等多种工业通讯协议。
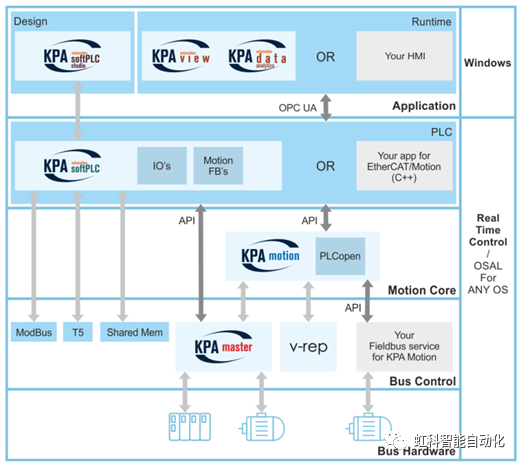
虹科KPA Automaiton softPLC
虹科KPA Automation softPLC是为Linux、Xenomai、INtime、Windows等实时操作系统开发PLC的编程环境。该技术专注于IEC61131-3,专为自动化解决方案而设计,涵盖机械、控制器、驱动器制造商、系统集成商和机器制造商等多个领域。虹科KPA Automation softPLC基于StratonPLC内核,可满足应用于产品的4项关键要求:小型、智能、简单和快速。虹科KPA Automation softPLC 是直观而强大的开发环境。它结合了自动化过程高效功能所需的所有技术堆栈,并提供了广泛的通信协议。
总结
在机器人和涂胶机等领域,EtherCAT 以对精度的更好控制得到广泛应用,不仅如此,有事实表明,采用 EtherCAT 技术控制的注塑机可以每年大幅节省原材料成本,因为 EtherCAT 更高速的总线通信周期控制给了机器改善质量的空间。
虹科在现场总线与工业以太网技术领域深耕多年,有着多种备受好评的产品和丰富的技术服务经验,为国内客户提供EtherCAT板卡、网关、IO模块、主从站协议栈等多种产品。若需了解更多信息,欢迎随时通过400-999-3848/info@hkaco.com联系虹科!
上述案例采用的控制方式围绕着PLC进行。PLC控制系统是一种引入了微电子技术、计算机技术、自动化控制技术、通讯技术而形成的新型工业控制装置。PLC控制可靠性高、运行速度快,目前已在半导体制造等工业行业中得到了广泛的应用,但也存在着成本高、使用人员需要PLC专业知识等难题。
除了PLC控制之外,还可以使用继电器控制系统来实现精确可靠的控制。继电器控制系统由器件和导线连接而成,具有结构简单、成本低等优点,同时由于原理简单,对工程技术人员来说易于掌握。
-
控制系统
+关注
关注
41文章
7001浏览量
114588 -
机器人
+关注
关注
214文章
31665浏览量
224580
发布评论请先 登录
浪潮云洲入选2026年度重庆市“机器人+”典型应用场景
EtherCAT转CANopen网关模块在工业机器人系统中的典型应用案例解析

如何实现机器人的精准控制?虹科PCAN-M.2 接口卡高效赋能人机交互

Neway电机方案在机器人技术方面的优势
再获国际权威认可!虹科方案荣登CiA官方期刊
机器人通信协议EtherCAT和CAN如何选择
EtherCAT主站协议栈EC-Master在ROS(机器人操作系统)中的应用

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
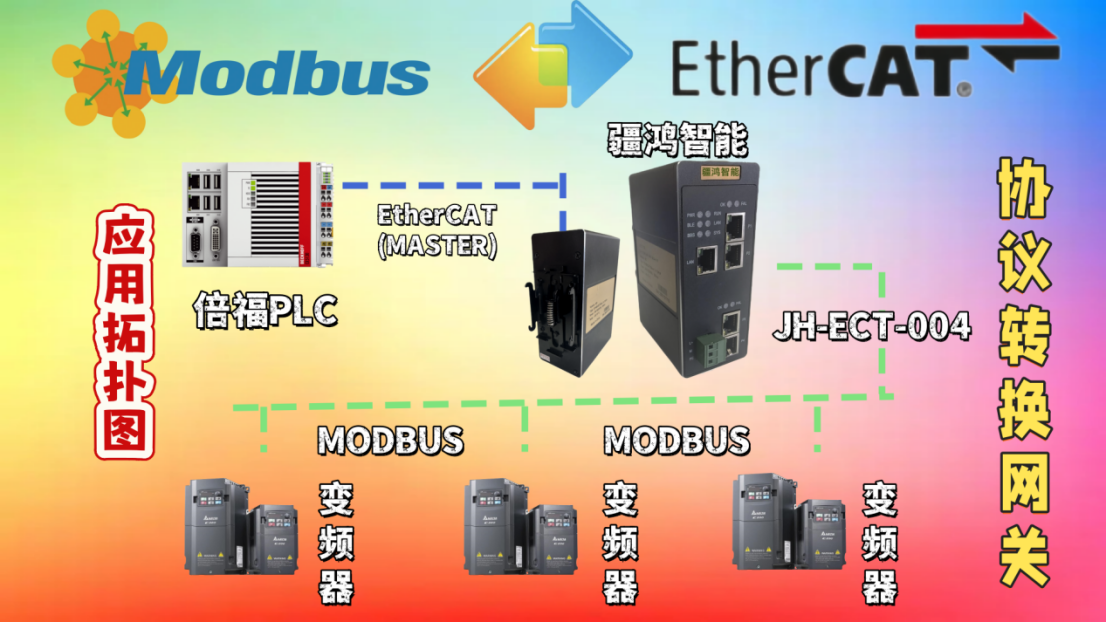
集成异构网络:EtherCAT转MODBUS机器人通信方案
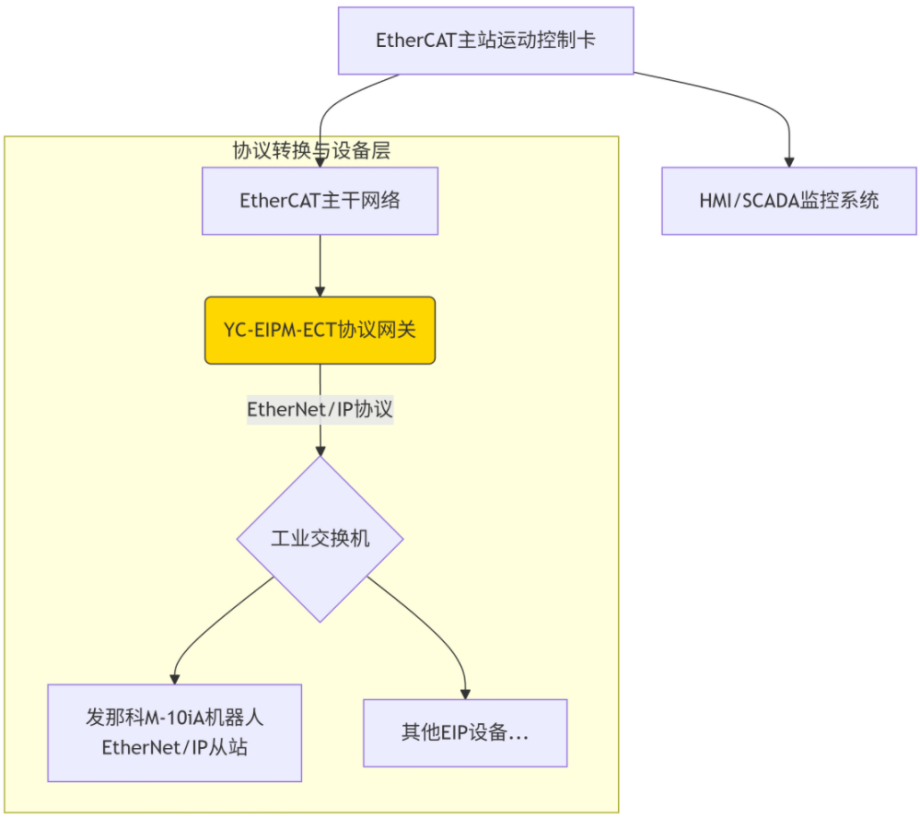
新能源产线中,发那科机器人通过协议转换网关与EtherCAT运动控制卡协同作业实例

发那科机器人借助EtherNet/IP转EtherCAT网关,实现与EtherCAT运动卡的高效互联案例
会议回顾丨虹科汽车×AI×机器人技术研讨会圆满落幕!

虹科动态 | 广东省机器人协会一行走访虹科,共探机器视觉新未来
ADI安全产品如何简化不同机器人控制系统中安全机制的实现

虹科分享 功夫机器人来了!CMG擂台之上的技术决胜点是什么?



评论