 自动驾驶“加速”,车载红外热像仪在多传感器融合中的应用
自动驾驶“加速”,车载红外热像仪在多传感器融合中的应用

多传感器融合是自动驾驶的必由之路。实现高级别的辅助驾驶、自动驾驶,需要多种传感器相互配合,共同构建汽车的感知系统。车载红外热像仪探测的是物体表面辐射的红外能量,在低照度、雨雪、雾霾、沙尘等场景条件下,依旧可以清晰成像,可有效弥补其他传感器不足,提升驾驶安全性。
高级别辅助驾驶和自动驾驶,若依赖单一传感器进行感知测距等工作,可能出现错误感知、漏感知、感知精度低等问题。使用多类传感器分别获取不同的感知信息,信息之间相互补充,可显著提高系统的冗余度和容错性,保证决策的快速性和正确性。
联合感知通过结合各个传感器的优点,达到1+1>2的效果。如下图所示,红外传感器结合激光雷达,不但能够准确获取环境信息,而且能获得准确的深度信息。
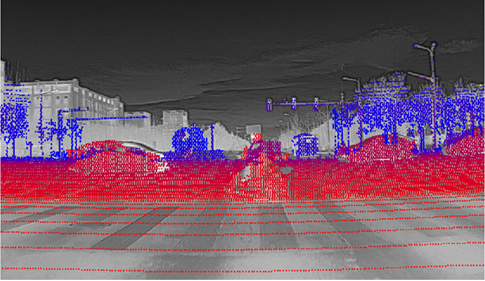
△ 红外雷达联合成像
传感器联合感知能够有效防止误检和漏检并且获得更多环境信息。如下方图片所示,由于车辆遮挡,雷达传感器未能完全感知出所有目标。而在联合红外2D感知结果后,实现了对于周围环境的完全感知。

△夜间红外2D感知结果
单独依靠红外进行感知,无法准确获得障碍物的三维坐标
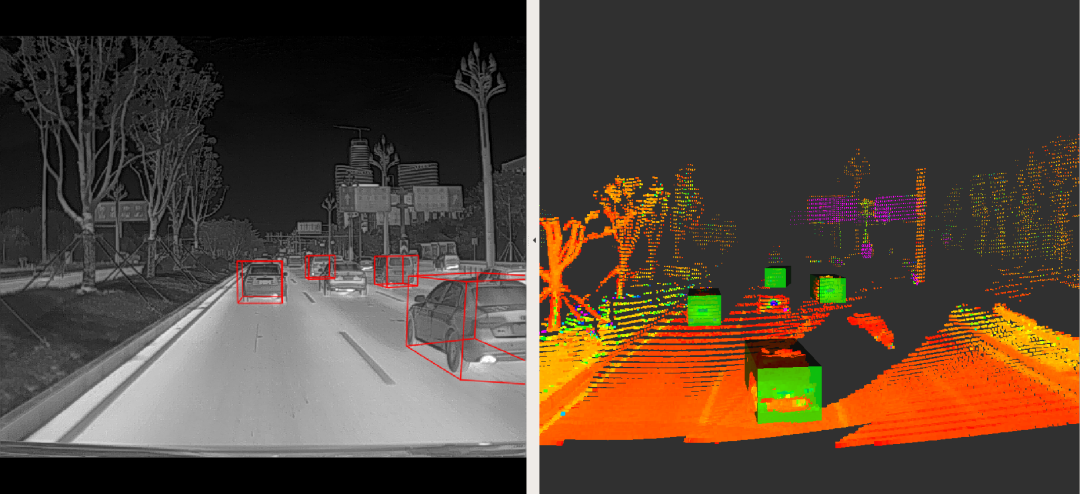
△ 基于激光雷达的环境感知结果
单独依靠雷达进行感知,当遇到障碍物遮挡时
无法准确感知物体

△ 多传感器联合感知
联合感知有效结合各传感器的优点,实现完全感知
如下方图片所示,走路和骑电动车的行人由于体积较小,反射数据数量有限,难以被有效感知。而在联合红外2D感知结果后,骑行者和行人能够被正确感知。

△ 夜间红外2D感知结果
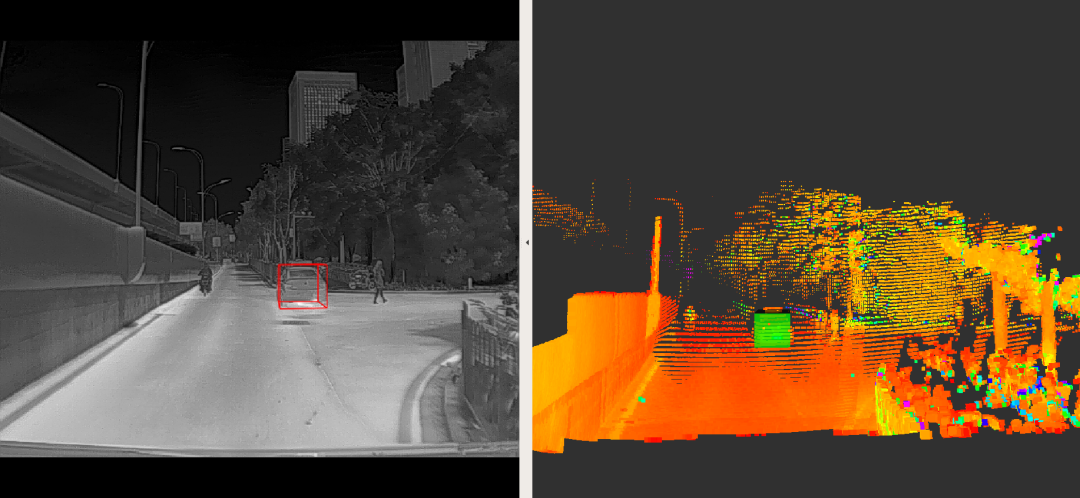
△ 基于激光雷达的环境感知结果
走路和骑电动车的行人由于体积较小,反射数据数量有限
难以被激光雷达有效感知
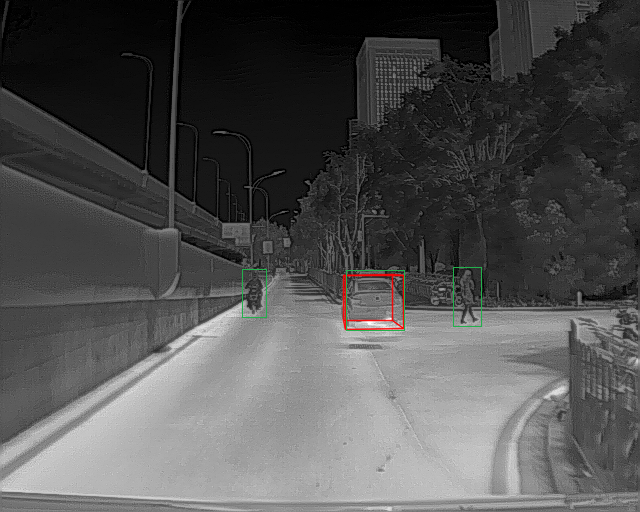
△ 多传感器联合感知
联合红外2D感知结果后,周围环境被完全感知
从技术层面上来说,红外热成像相比可见光摄像头、激光雷达、毫米波雷达等其他传感器而言,优势在于具有夜视能力以及受雨雪、雾霾、沙尘影响小,同时红外热成像对生命体的感知非常灵敏,可作为夜间、恶劣天气辅助驾驶或者增加自动驾驶安全性和可靠性的极佳选择和补充。
睿创微纳深耕车载红外夜视领域多年,是国内汽车红外市场的先行者,多年来积极推动红外在汽车行业的应用。公司在红外传感器技术、芯片封装技术、红外专用芯片处理技术等方面均保持领先优势,为车载红外夜视产品提供有利支撑。旗下Asens系列等汽车红外热像仪产品,通过IATF16949车规体系认证,在自动驾驶、汽车辅助驾驶(ADAS)、特种车辆应用等领域,皆拥有广阔的应用前景,目前已在不同类型客户的场景得到应用。
-
传感器
+关注
关注
2578文章
55833浏览量
795537 -
艾睿光电
+关注
关注
0文章
111浏览量
626
发布评论请先 登录
格罗方德传感器融合方案助力实现更安全的自动驾驶

自动驾驶传感器前融合与后融合技术上有何区别?

自动驾驶多传感器前融合,到底提前融合了什么?

智驾之“眼”的血管革命:自动驾驶传感器融合趋势下,多频段射频连接器集成方案深度全景解析

数据洪流中的“隐形守护者”:ICY DOCK 硬盘盒如何重塑自动驾驶数据管理生态

纯视觉自动驾驶的优势和劣势有哪些?

如何设计自动驾驶传感器失效检测与容错策略?
L4级自动驾驶数据采集系统首选
超声波传感器线圈:自动驾驶实现精确实时近距离感知的关键
激光雷达传感器在自动驾驶中的作用
红外热成像VS传统传感器:智能驾驶感知的优胜之选

自动驾驶系统的算力越高就越好吗?
太阳光模拟器 | 在汽车自动驾驶开发中的应用

康谋分享 | 基于多传感器数据的自动驾驶仿真确定性验证

自动驾驶汽车是如何准确定位的?




评论