 虹科干货 | 最简单实用的CANopen介绍,看完你就明白了(2)
虹科干货 | 最简单实用的CANopen介绍,看完你就明白了(2)

在上一篇文章中,我们介绍了CANopen协议的基础知识和核心概念,而在本篇文章中,我们将继续讲解CANopen通信基础知识。本系列文章主要介绍CANopen协议的基础内容,包括对象字典、服务、SDO、PDO和主/从站节点等。如需CANopen软硬件解决方案或培训服务,可通过400-999-3848或support@hkaco.com联系虹科工业控制团队!
前文回顾:虹科干货 | 最简单实用的CANopen介绍,看完你就明白了(1)
1
CANopen框架
CANopen frame
为了理解CANopen通信,有必要对CANopen的CAN报文进行分解。如下图,11位的CANID被称为通信对象标识符(COB-ID),它被分成两部分。前4位相当于功能代码,接下来的7位包含节点ID。
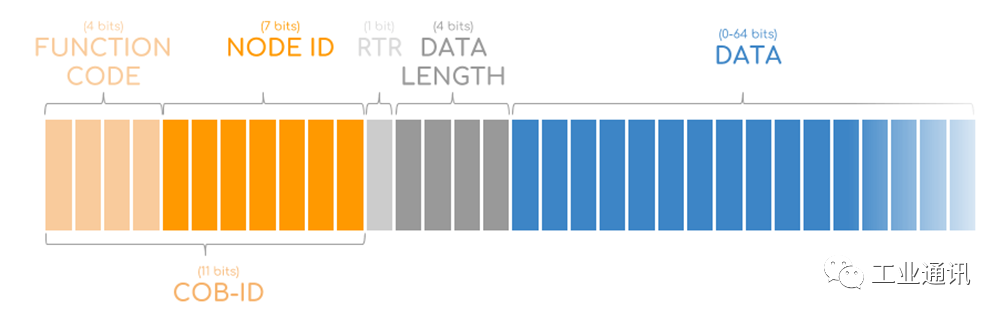
为了理解COB-ID的工作原理,需要从简单的CANopen网络中如何使用标识符的预定义分配开始。
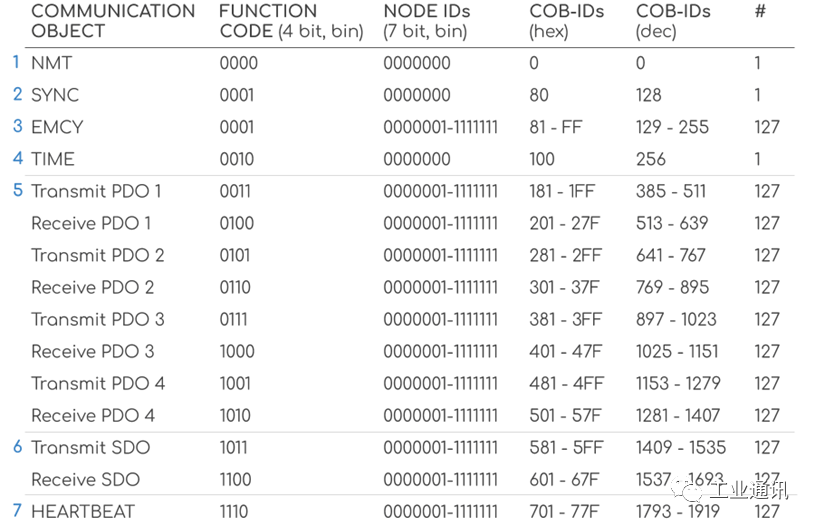
如上图,COB-ID(381、581等)与通信服务(传输PDO3、传输SDO等)相关联,因此,COB-ID详细说明了哪个节点正在发送/接收数据,以及使用了什么服务。如下图的例子,一个节点ID为5的CANopen设备将通过11位的CAN ID 585传输SDO,这对应于二进制功能代码1011,节点ID 5(在二进制中为0000101)。
2
CANopen通信协议/服务
CANopen communication protocols/services
接下来,我们将简要介绍CANopen的7种服务类型,以及它们如何利用8个CAN帧数据字节。
1. 网络管理(NMT)
NMT服务用于通过NMT命令(如:启动、停止、复位)来控制CANopen设备的状态(如:预运行、运行、停止)。为了改变状态,NMT主机发送一个带有 CAN ID 0的2字节消息(即功能代码0和节点ID 0)。所有从站节点都处理这个报文。第一个CAN数据字节包含请求的状态,而第二个CAN数据字节包含目标节点的节点ID。节点ID 0表示广播命令。
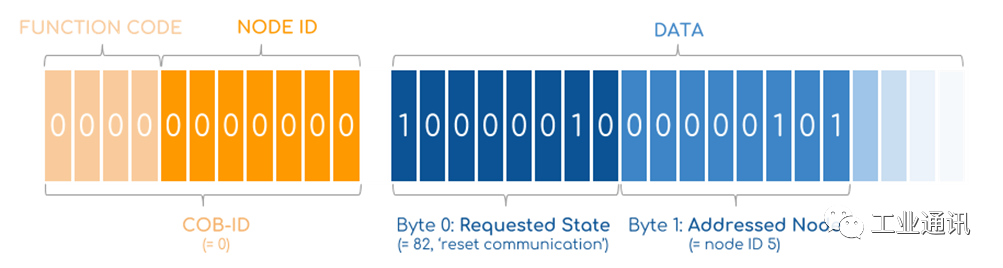
可能的命令包括转换到运行(状态01)、停止(状态02)、预运行(状态80)以及重置应用程序(81)和重置通信(82)。
例如:将节点0x06设置为运行模式:000 01 06
2. 同步(SYNC)
SYNC报文用于同步几个CANopen设备的输入和响应--通常由应用主站触发。应用主机将SYNC消息(COB-ID 080)发送到CANopen网络(带或不带SYNC计数器)。多个从节点可以配置为对SYNC做出反应,并通过传输同时捕获的输入数据或通过与参与同步操作的节点同时设置输出来响应。使用SYNC计数器可以配置几组同步操作的设备。
3. 紧急情况(EMCY)
紧急服务用于设备出现致命错误(如传感器故障)时,允许它向网络的其他部分指示这一点。受影响的节点以高优先级向网络发送单个EMCY消息(例如,节点5的COB-ID 085)。数据字节包含有关错误的信息,可以查找详细信息。
4. 时间戳(TIME) [PDO]
通过这种通信服务,可以分配全球网络时间。时间服务包含一个6字节的日期和时间信息。应用主机发送 CAN ID 为100的TIME消息,其中最初的4个数据字节包含以毫秒为单位的午夜之后的时间,接下来的2个字节包含自1984年1月1日以来的天数。
5. 过程数据对象 [PDO]
PDO服务用于在设备之间传输实时数据,例如位置等测量数据或扭矩请求等命令数据。在这方面,它类似于J1939中的广播数据参数。关于PDO服务,我们将在下一篇文章中进行详细介绍。
6. 服务数据对象 [SDO]
SDO服务用于访问/改变CANopen设备的对象字典中的值。例如,当应用主站需要改变CANopen设备的某些配置时,可以通过SDO服务来实现。关于SDO服务,我们将在下一篇文章进行详细介绍。
7. 节点监控(心跳) [SDO]
心跳服务有两个目的:提供一个“活动”的消息和确认NMT命令。NMT从设备周期性地(例如每100毫秒)发送心跳消息(例如节点5的CANID为705),在第一个数据字节中包含节点的“状态”。如果在特定时间限制内没有收到任何消息,心跳消息的“消费者”(例如 NMT 主设备和可选的任何其他设备)就会做出反应。
例如:节点5处于预运行模式,周期性发送:705 7F
在下一篇文章中,我们将继续讲解CANopen通信的相关知识,包括对象字典、SDO、PDO等,欢迎关注本公众号以便第一时间获取更新的内容。虹科在CAN、CANopen等领域深耕多年,有着深厚的技术实力,目前已面向国内市场推出了CANopen开发源代码、CANopen数据记录仪,和支持CANopen协议的网关、板卡、IO等产品。
-
CAN
+关注
关注
59文章
3111浏览量
473897
发布评论请先 登录
虹科动态 | 2026年4月精彩回顾

虹科动态 | 华工MBA校友一行走进虹科,对话多领域技术底座
再获国际权威认可!虹科方案荣登CiA官方期刊
虹科动态 | 2026年1月精彩回顾
虹科动态 | KOTRA广州韩国贸易馆 韩国商工会领导来访虹科总部
虹科动态 | 2025年12月精彩回顾

虹科答疑 | 使用虹科PCAN-Explorer 6进行.DBC解析总共分几步?
虹科动态 | 虹科×长城汽车技术交流日圆满落幕!
虹科干货 | 嵌入式AI崛起,CAN总线如何重塑新角色?
圆满收官 | 虹科CAN总线专题全系列直播精华回顾已上线!
虹科案例 | 矿业数字化转型:虹科owa5X如何赢得日立Wenco信任?
智能制造新升级 | 看CEO陈秋苑揭秘虹科如何全流程赋能?
广州邮科模拟量光端机,到底是啥神器?一篇文章给你讲明白!

直播回顾 | 硬核干货放送,虹科CAN总线应用层直播助您告别低效联调,破解车载网络开发核心难题



评论