 AGV小车是如何通过AGV激光导航仪识别反光柱坐标
AGV小车是如何通过AGV激光导航仪识别反光柱坐标

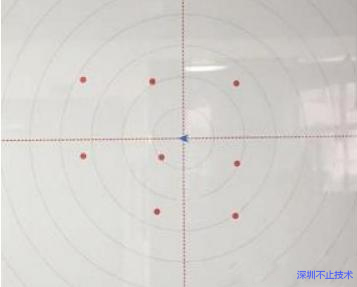
AGV小车定位原理——识别反光柱坐标
通过过滤反射系数,可以得到同一反光柱上多个激光点的详细数据(角度、距离、反射系数)。然后通过简单的数学计算和规律分析,就可以得到该反光柱相对导航仪的准确坐标。
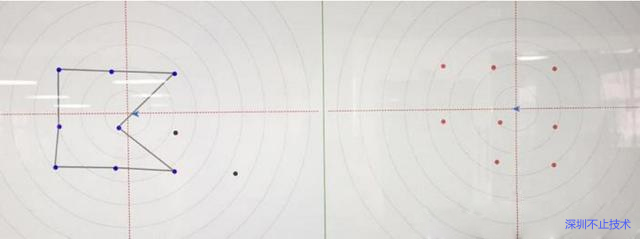
AGV叉车定位原理——定位匹配
想要获得AGV激光导航仪坐标和角度,必须同时满足以下2个条件:
①AGV叉车导航仪至少可以扫描到3个反光柱
②叉车AGV导航仪扫描到的多个反光柱构成的图形,在已有地图数据中,可以成功匹配到相同构形。利用已有地图数据,结合即时扫描的反光柱坐标,反推出AGV导航仪位姿。
深圳市不止技术有限公司是激光雷达行业头部知名企业,团队自2016年底就开始了多款激光雷达方案的研发,并创造了30多件发明专利,我们作为激光雷达行业5年多的资深老兵,对激光雷达有着深厚的技术积累。是一家能提供单点、单线到多线全系列、dtof、itof全品类激光雷达方案定制化的公司,而且掌握了机器人移动底盘技术。在激光雷达核心硬件、专用芯片、AI算法上具有完整的自主知识产权
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
激光雷达
+关注
关注
982文章
4548浏览量
197088 -
激光系统
+关注
关注
0文章
154浏览量
9763
发布评论请先 登录
相关推荐
热点推荐
AGV激光导航到底有什么过人之处?
激光导航AGV以±10毫米的精准定位、无需地面辅助的灵活部署,以及卓越的环境适应力,成为智能制造时代的高效搬运解决方案,显著提升生产柔性与长期经济效益。

AGV为何难以防水?
和经济因素的叠加。 AGV工厂 一、防水设计的技术瓶颈 AGV的防水难题首先体现在精密传感器上。这些设备依赖激光雷达或摄像头感知环境,雨水或湿气侵入会导致信号干扰,显著降低导航精度

物流革命时代:全流程AGV智能化
等功能,无需人工干预就能完成货物运输任务。 AGV物流 地牛AGV核心技术:精准导航与智能控制 (一)导航技术:精准定位,畅行无阻 激光

高效搬运+灵活转向:AGV机器人,智能物流的极简解决方案!
。 AGV智能物流 AGV的核心技术在于其自主导航与智能控制能力。通过激光雷达、视觉传感器等先进设备,AGV能够实时感知周围环境,实现精准定

AGV中IGPS定位精度提升方法
激光/二维码/磁导航AGV非标订制厂家,部分内容来自于 见行AGV:www.jxagv.com IGPS (室内全球定位系统) 通过红外
仓储中心的AGV升级项目AGV小车通过modbus rtu转profinet模块与西门子1200 PLC进行数据互传解决案例
仓 一、 项目痛点:移动单元内的“信息阻塞” 某大型电商仓储中心的AGV升级项目中,其AGV小车采用了高性能的西门子S7-1200/1500系列PLC作为主控大脑,通过PROFINET
大型电商仓储物流中心AGV小车通过Modbus RTU转Profinet模块与西门子PLC进行数据互传解决案例
AGV的路径规划、任务调度和交通管理。为了实现高精度导航,每台AGV均配备了先进的激光导航传感器,用于实时扫描周围环境,获取自身的精确

Modbus RTU转Profinet:AGV小车与西门子1500PLC数据互通的大型电商仓储物流案例
AGV的路径规划、任务调度和交通管理。为了实现高精度导航,每台AGV均配备了先进的激光导航传感器,用于实时扫描周围环境,获取自身的精确

AGV:智能制造时代的物流中枢
生力军。 AGV立库 一、技术突破:从轨道到无轨的智能进化 多模态导航系统 现代AGV采用SLAM(同步定位与建图)技术,通过激光雷达+视觉融合方案实现厘米级定位,较传统磁条
AGV机器人选型技术分析与应用策略
效果的诠释 。 AGV立库 一、AGV选型核心参数对比 导航技术 激光导航 :精度±10mm,适用于高动态环境,但成本较高。 磁条
深耕安全管理 | 使用AGV小车必看
AGV 毋容置疑,AGV小车投用之后带来的产能提升效益是明显的。通过设备替代人工,也能一定程度上减少叉车造成的车辆伤害、挤压伤害等事故,毕竟是减少了人员暴露在危险环境中的频率。
EtherNet/IP转MODBUS TCP网关配置:SCADA与AGV小车高效通讯指南
协议转换网关 ,通过 EtherNet/IP转MODBUS TCP 协议转换功能,实现SCADA系统与AGV小车的无缝通信。 二、设备配置与

如何选择合适的背负式AGV小车
场地布局和空间限制:根据工作场所的布局,选择适合的联集AGV小车尺寸和类型。例如,在狭窄的通道或空间有限的区域,可选择体积较小、转弯半径小的联集AGV小车。 环境条件:如果工作环境存



评论