 基于平面投影的单目视觉AGV定位算法
基于平面投影的单目视觉AGV定位算法

0 引言
视觉定位是计算机视觉中的一个重要研究问题,广泛应用于机器人自主导航、机器人定位、视觉伺服、摄像机校正、目标跟踪、视觉检测、物品识别和工业零部件装配等领域。近年来,计算机视觉飞速发展,涌现出大量的技术与算法,如主动视觉、面向任务的视觉、基于知识的视觉、基于模型的视觉以及多传感器和集成视觉等方法[1]。根据使用镜头数目分类,计算机视觉分为单目视觉定位、双目视觉定位与多目视觉定位。双目立体视觉是基于视差原理,由多幅图像获取物体三维几何信息。相比于基于多相机的模型定位方法,单目视觉的优点主要体现在只需单幅图像技能实现定位,不存在图像匹配问题,处理速度快,定位精度高。 传统视觉对目标定位,是通过对摄像机的内外参数进行标定来实现的[2]。计算机标定方法可以分为传统标定方法、自标定方法和基于主动视觉的标定方法[3]。传统标定方法是现在使用最为普遍的标定方法,利用结构已知、高加工精度的标定块作为标定物,用摄像机拍摄若干幅标定物的图片,通过计算2D 图像点与3D 空间点之间的关系来完成标定,通过对标定物的合理设计得到高精度的结果。该方法的优点是适用各种摄像机模型,定位精度高,缺点是标定过程复杂。自标定方法不需要标定物,仅通过运动摄像机所拍摄的标定图片中匹配点的关系来进行标定。由于不需要标定物,该方法适用范围广、灵活性强,但是图像匹配中需要求解多元非线性方程导致其鲁棒性较差[4]。基于主动视觉的标定方法需要预知摄像机的详细运动信息,这需要昂贵的设备对摄像机的运动轨迹进行记录,实验成本较高[5]。 本文针对AGV 所处的平坦路面的单目视觉定位,提出了一种新的简单可行的算法。该算法不需要对摄像机进行标定,也不需要求解摄像机的内、外参数,通过分析图像像素平面与现实空间平面的几何关系,得出像素点与现实点间的映射关系。实验结果表明 , 文中提出的算法定位精度高 , 实时性好 , 为解决计算机视觉的测量、定位与AGV 视觉导引提供一种新的思路,具有进一步研究的价值。1 摄像机模型及存在的问题
1.1 摄像机模型本文采用理想的针孔摄像机模型[6],忽略实际摄像机中的畸变问题。针孔成像模型又称为线性摄像机模型,空间中任何一点在图像中的成像位置可以用针孔成像模型近似表示,即任何一点在图像中的投影位置p 为光心O 与P 点的连线OP 与图像平面的交点。分别以其次坐标m=[u,v ,1]T,W=[X,Y,Z ,1]T 来表示像素点p 及空间点P ,根据针孔摄像机成像模型,投影方程为
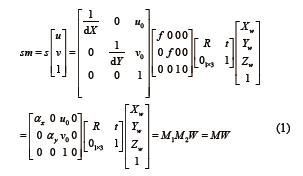
式中:αx=f/ dX 为u 轴上的尺度因子,或称为u 轴上的归一化焦距;αy=f/ dY 为v 轴上的尺度因子,或称为v 轴上的归一化焦距;M 为3×3 矩阵,称为投影矩阵;M1 由αx、αy、u 0、v 0 决定,由于αx、αy、u 0、v 0 只与摄像机内部参数有关,称这些参数为摄像机内部参数;R、t 分别表示摄像机坐标系与世界坐标系之间旋转矩阵和平移向量,M2 称为摄像机外部参数。确定某一摄像机的内外参数,称为摄像机标定。
1.2 存在的问题在单目视觉方法测量物体位姿时,如果物体上的某些特征在物体坐标系下的坐标已知,要求出这些特征在摄像机坐标系下的三维坐标,进而求出摄像机坐标与物体坐标系之间的相对位姿关系。在这个问题中,一般需要求得摄像机内外参数进行投影计算。如果摄像机固定,摄像机外参数一般固定不变,而摄像机内参数只与摄像机硬件有关,定焦摄像头的内参数固定不变。如果已知摄像机内外参数,就已知投影矩阵,这时对任意空间点,如已知它的坐标,就可以求出它的图像点的位置。反过来,如果已知某空间点的图像点的位置, 即使已知摄像机的内外参数,也不能唯一确定。这是因为,已知图像点时,由针孔成像模型,任何位于射线上的空间点的图像点都是点。因此,该空间点是不能唯一确定的。为解决这一问题,单目视觉在特定环境内设置一个人工图标,图标的尺寸以及在世界坐标系中的方向、位置等参数都是已知的;而双目视觉通过不同视角拍摄两幅或多幅图像,增加约束条件[7]。本文提出一种新的单目视觉投影定位算法,在该算法中,现实平面中的二维空间点先投影到一个虚拟参考平面上,如图1 所示,该参考平面与摄像机光轴垂直且与成像平面平行,然后虚拟参考平面上的点通过镜头平行透视写入成像平面,并形成图像像素点。在第二步平行透视中,参考平面与成像平面只是简单的缩放关系,保留了透视成像中丢失了的平行属性与位置属性。这样,所述问题就转化为虚拟参考平面与现实平面之间的映射求解问题。
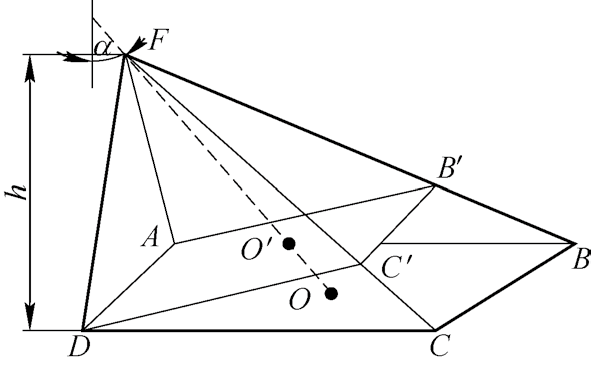
图1 摄像机、参考平面、现实平面示意图
2 图像像素平面与现实平面的映射关系
首先约定摄像机、参考平面、现实平面的坐标系,如图2~ 图4 所示。
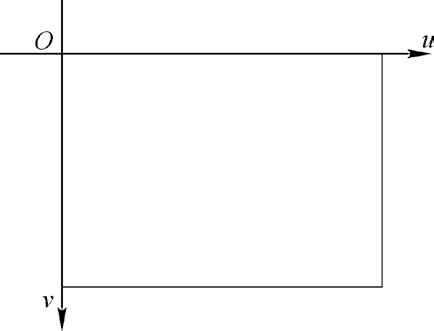
图2 像素坐标系
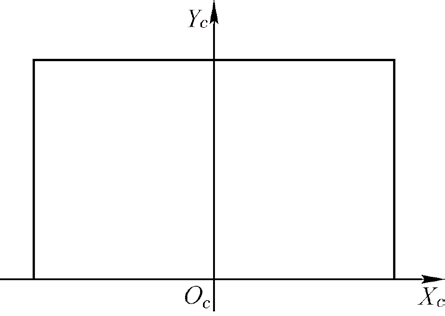
图3 参考平面坐标系
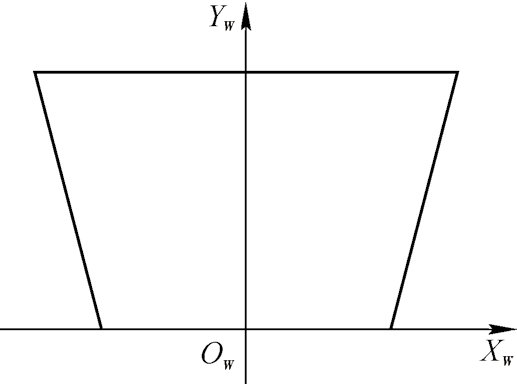
图4 现实平面坐标系
2.1 像素平面到参考平面由于摄像机垂直于参考平面 , 所以像素平面到参考平面是等比例缩放的,它们之间只相差一个比例系数。由于参考平面AD 边与现实平面AD 边重合,可以通过实际测量得到AD 边的实际长度。参考平面与像素平面等比例缩放,由图像像素长宽比可求得AB' 长度。若W=|AD |,L =|AB' |,图像像素分辨率为m×n ,可得对应像素平面上一点p (u ,v ) 的参考平面坐标为P (Xc ,Yc ),有

2.2 参考平面到现实平面虚拟参考平面与现实平面在模型中是简单的平面投影关系,只要求解出平面投影的单应性矩阵,就能得到它们之间的映射关系。平面投影定理[8]:对于一个平面投影,一定存在一个非奇异3×3 矩阵H,使得对任何P 2 上的齐次点x ,有h (x )=Hx 。
或简记为x' =Hx 。其中H 称为单应性矩阵,这个投影变换有8 个自由度。将参考平面坐标(Xc,Yc),现实平面坐标(Xw,Yw)用齐次坐标表示为(Xc,Yc,1),(Xw,Yw,1)。则参考平面与现实平面间投影关系为
由于现实空间点在同一平面,设h 33=1, 每一组对应点可得:
由四组对应点就可以得到8 个关于H 的元素的线性方程组
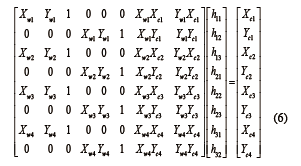
用AH=B 来表示上式,则H=A-1B 。检测到图像上特征点的像素坐标值,通过式(2)、式(4)可得该特征点在现实平面对应点的坐标,由此可以达到单目视觉定位的目标。
3 AGV 定位实验与结果分析
为了验证本文算法的精度,设计了AGV 定位实验。采用MV-U300 工业相机,6~12 mm 变焦镜头,拍摄室内地面。为了验证该算法的精度,在地面上放置一张4×4 的黑白棋盘图。棋盘长宽200 mm,每小格边长50mm,如图5 所示。测得相机视野四个顶点坐标分别为A(-235, 0),B(-575,960),C(575,960),D(235,0);由相机参数计算得到的参考平面的四个角点坐标为A' (-235,0),B' (-235,352.5),C' (235,352.5),D' (235,0);计算投影变换的单应性矩阵,有
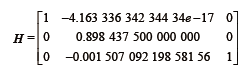
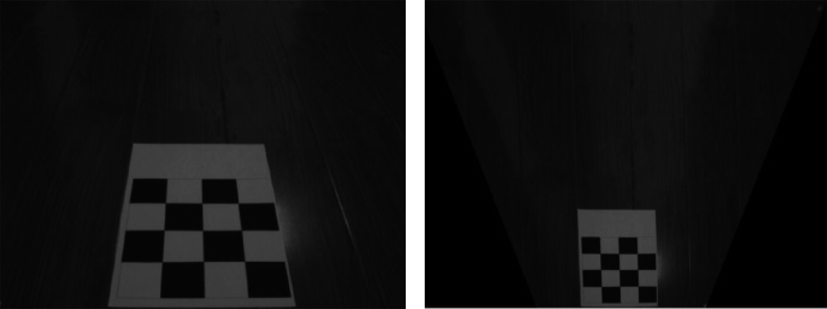
图5 原始图像(左)与变换图像(右)
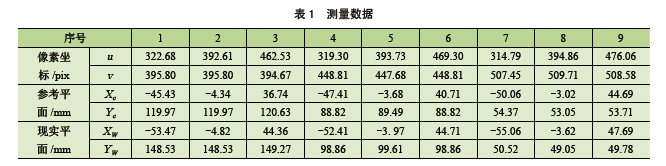
为检验本文算法的定位精度,对所采集图像进行Hough 变换检测直线,从而获取图中所示棋盘图黑白色块的9 个交点像素坐标( 自左至右、从上往下排),通过本文算法求得对应的参考平面交点,再通过单应性矩阵求得对应点的现实平面坐标。具体实验数据见表1。通过现实平面的实际坐标计算黑白色块的边长,与真实值50 mm 比较,可以发现横排误差在±3% 以内,竖排误差在±5% 以内;竖排误差比横排误差大,主要是因为图像竖向放大系数相对变化较大。结果表明,该方法测量精度较高,可以满足一般的定位系统要求。
4 结论
本文提出的算法结合单目视觉导引AGV 小车,省去了传统视觉定位方法中的摄像机标定环节,采用平面投影的思路解决单目视觉定位,简化了视觉导引AGV小车导引模块的硬件配置与定位计算。该算法针对通用摄像机模型针孔相机模型,利用平面投影原理,对平坦路面实现了单目视觉定位。实验结果表明,该方法简单可行,对室内AGV 和室外平坦路面AGV 的路径导航与视觉避障都有一定的实用价值,为解决机器视觉的定位、测量问题提供了一种新思路。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
算法
+关注
关注
23文章
4802浏览量
98521 -
AGV
+关注
关注
28文章
1571浏览量
43785
原文标题:基于平面投影的单目视觉AGV 定位算法
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
高效搬运+灵活转向:AGV机器人,智能物流的极简解决方案!
。 AGV智能物流 AGV的核心技术在于其自主导航与智能控制能力。通过激光雷达、视觉传感器等先进设备,AGV能够实时感知周围环境,实现精准定位

双目视觉是如何实现深度估计的?
[首发于智驾最前沿微信公众号]自动驾驶的纯视觉方案中,单目摄像头因无法直接感知深度,在环境理解上存在根本局限,双目视觉技术在此需求下应运而生。它通过模拟人眼,利用双摄像头的视差来推算距离,将二维图像

AGV中IGPS定位精度提升方法
激光/二维码/磁导航AGV非标订制厂家,部分内容来自于 见行AGV:www.jxagv.com IGPS (室内全球定位系统) 通过红外激光和多基站三角测量实现亚毫米级定位,是
AGV的种类以及如何进行合理选择
AGV AGV(AGV)是无人驾驶车辆,使用计算机软件和其他导航技术来确定其定位和移动。它们可以在制造设施或仓库内运输各种材料和成品。基本上,如果你对物料搬运系统的数字化感兴趣,那
AGV视觉导航:智能物流的“智慧之眼”
获取移动物体在空间中所处的位置、方向和其他环境信息,并用一定的算法对所获信息进行处理,建立环境模型,进而寻找一条最优或近似最优的无碰路径,实现安全移动,到达目的地。 AGV物流仓储 视觉导航的核心是通过摄像头采集环境图像,结合计
AGV:智能制造时代的物流中枢
生力军。 AGV立库 一、技术突破:从轨道到无轨的智能进化 多模态导航系统 现代AGV采用SLAM(同步定位与建图)技术,通过激光雷达+视觉融合方案实现厘米级
AGV无人叉车采用了哪些技术来保障人、车、货场协同安全?
:智能感知与自主决策 多传感器融合感知 AGV无人叉车搭载激光雷达、超声波传感器、3D视觉摄像头、UWB定位标签等设备,形成“视觉+触觉+空间感知”三重防护。例如: 3D
星空投影灯方案开发设计案例
面临的挑战。今天,深圳三佛科技将介绍一款基于辉芒微8 位 MCU 的星空投影仪控制方案,它不仅能够满足上述需求,还能在极短的开发周期内实现量产,为市场带来全新的选择。
方案定位
星空投影灯方案面向三类
发表于 09-03 15:45

双目视觉在智能驾驶领域的应用
围绕“双目智驾应用”,我们将推出系列文章深入解析双目视觉如何跨越技术鸿沟,在中国智驾的沃土上生根发芽,探索其赋能未来出行的无限可能。
AGV小车中的动态路径规划算法揭秘
并非一成不变时,动态路径规划能力就显得至关重要。本文将深入探讨几种主流的动态路径规划算法(如A、Dijkstra、RRT等),并解析它们如何在AGV行业中大显身手。 为何需要动态路径规划? 1.简介 传统的静态路径规划假设环境是完全已知的

UWB单基站360°测距定位400米,二维测距定位解决方案
环境的定位服务。本文将详细介绍一款全新的、基于 PDOA(到达相位差)算法的 UWB 平面定位方案,它具备单基站
UWB 单基站二维定位:400 米广域覆盖的革新性方案
环境的定位服务。本文将详细介绍一款全新的、基于 PDOA(到达相位差)算法的 UWB 平面定位方案,它具备单基站

打破室外全域工作“盲区”!广和通双目视觉算法将成就云深处科技机器狗“慧眼”
双目视觉模块RV-BOT为云深处科技四足机器人打通室外工作链路。通过深度融合广和通自主研发的双目视觉算法,RV-BOT将显著提升了室外场景中的定位精度,为国产足式机器人的自主导航与智能
发表于 05-15 14:26
•1690次阅读

【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
相机标定是视觉系统的基石,直接影响后续图像处理的精度。书中详细介绍了单目和双目相机的标定流程,包括标定板的使用、参数优化以及标定文件的应用。
实际应用中,标定误差可能导致机器人定位偏差,因此标定过程
发表于 05-03 19:41



评论