 STM32F103C8T6实现直流电机速度PID控制
STM32F103C8T6实现直流电机速度PID控制

01 前言
前面完成了基于STM32F103C8T6+L298N+MG513P30直流电机的PWM控制和两种方法的编码器实时速度反馈,拿到这个反馈值后我们就可以使用经典的PID算法,对电机的转速进行准确的控制了,这篇文章主要分享PID基本原理和Keil5的PID编程。
02 PID的基本原理
PID算法是上个世纪30年代左右提出的控制算法,大至航空航天、小至家庭温度调控都可以使用PID算法,虽然PID算法从提出到现在已经历经了快一个世纪,其后也出现了很多现代的智能算法,比如蒙特卡洛、智能控制等等,但现在PID仍然经久不衰,可以说目前80%以上的控制仍然使用PID算法。
PID算法是自动控制原理课程学习的一部分,但在课程中老师讲解的是最基本的原理,没有任何拓展,更别提应用了,首先,先简单说一下PID控制算法的原理。
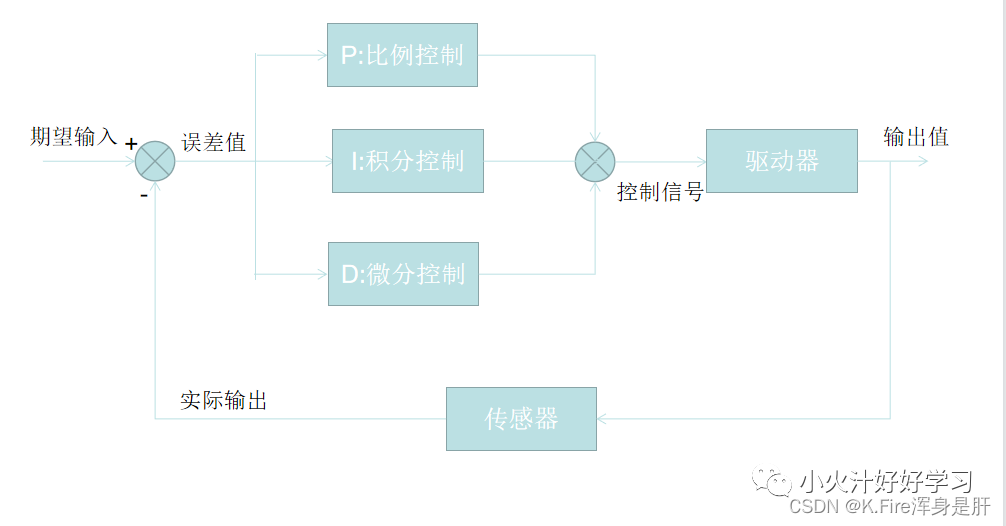
上图为PID算法的控制框图,在我们控制电机速度时,期望输入就是电机的期望速度值,期望输入与由编码器测得的实际速度作差,求出的误差值传给PID的控制部分,算出需要输出的控制信号,将该控制信号传给控制器,也就是输出给电机驱动板L298N,这样形成一个循环,就实现了对电机速度的精准控制。
中间PID的控制部分的连续型公式如下:

但是在计算机中计算机很难实现连续型变量的积分或者微分操作,因此在计算机中,我们使用离散型的积分和微分,就是取时间间隔T为1,离散型PID公式如下:

各个项的主要作用及效果如下:
- P:增加快速性,过大会引起震荡和超调,P单独作用会一直有静态误差
- I:减少静态误差,过大会引起震荡
- D:减小超调,过大会使响应速度变慢
在实际的应用中,有可能不需要PID同时使用,比如在速度控制中一般只使用PI控制就够了
03变式PID
PID算法有很多进化版本,分类别的简单阐述一下
增量式PID
在电机的速度PID控制算法中,因为我们一般使用PI算法就够了,所以我们可以使用增量式PID算法,这样可以让我们的公式和代码更加简洁。

积分限幅
因为积分的效果是累加,随着时间的推移,积分项的值会升到很高,积分本来的作用是用来减小静态误差,但积分项过大会引起过大的震荡,所以我们可以加一个判断函数if,当积分项的值达到一定值后,就让积分项保持这个值,避免引起更大的震荡。
积分分离
如果刚开始的误差比较大,那么积分项则会在刚开始就累计到了一个很大的数值,那么当第一次实际输出达到期望值时,不会立刻停止,而是会产生一个很大的过冲。这时就需要用到积分分离,就是当误差值过大时,我们就不使用积分项,只让PD项单独作用,当误差值较小后,再加入积分项,以减小静态误差。
04 Keil5程序
为了使用方便,我们先定一个PID结构体,结构体储存左右轮的PID参数、限幅值、误差等参数。
typedefstruct
{
//相关速度PID参数
floatVelcity_Kp;
floatVelcity_Ki;
floatVelcity_Kd;
floatUr;//限幅值
u8PID_is_Enable;//PID使能
intUn;//期望输出值
intEn_1;//上一次的误差值
intEn_2;//上上次的误差值
intPWM;//输出PWM值
}PID_InitDefStruct;
在程序初始化部分,定义一个初始化函数,对其中的参数进行初始化配置。
voidPID_Init(PID_InitDefStruct*p)
{
p- >Velcity_Kp=5;
p- >Velcity_Ki=0.5;
p- >Velcity_Kd=0;
p- >Ur=7100;
p- >PID_is_Enable=1;
p- >Un=0;
p- >En_1=0;
p- >En_2=0;
p- >PWM=0;
}
当编码器的定时器,每隔10ms反馈一次编码器测出的实际速度后,调用PID函数,求解输出给电机驱动板的PWM值,然后通过Set_Pwm函数进行设置,以此控制电机转速。
voidVelocity_PID(intTargetVelocity,intCurrentVelocity,PID_InitDefStruct*p)
{
if(p- >PID_is_Enable==1)
{
intEn=TargetVelocity-CurrentVelocity;//误差值
p- >Un+=p- >Velcity_Kp*(En-p- >En_1)+p- >Velcity_Ki*En+p- >Velcity_Kd*(En-2*p- >En_1+p- >En_2);//增量式PID
p- >En_2=p- >En_1;
p- >En_1=En;
p- >PWM=p- >Un;
/*输出限幅*/
if(p- >PWM >p- >Ur)p- >PWM=p- >Ur;
if(p- >PWM< -p- >Ur)p- >PWM=-p- >Ur;
}
else
{
PID_Init(p);
}
}
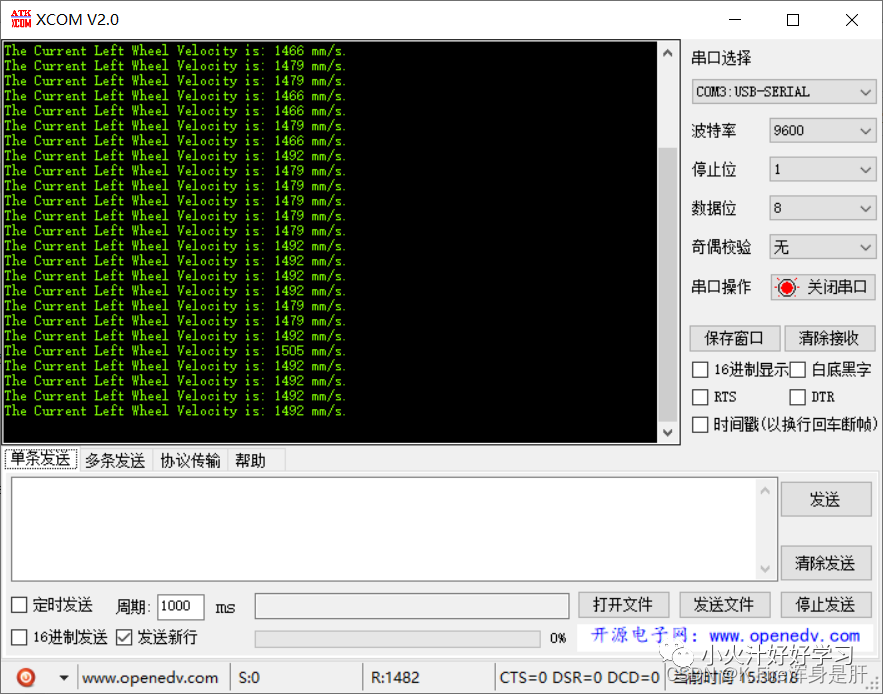
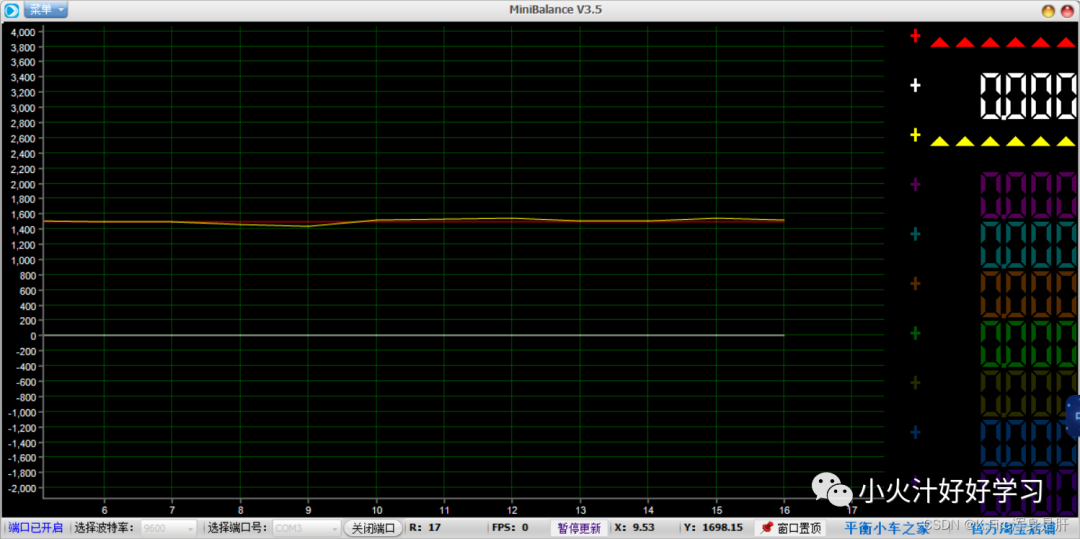
测试给电机输入理想转速为1500mm/s,随便设置了一组PI参数,得到实验结果如下:
可以通过上位机看一下波形,可以看到在稳定状态的静差是比较小的。
05 总结
对于PID算法这才是万里长征的第一步吧,想要调出完美的控制程序,还需要复杂的PID参数整定,这里可以配合上位机进行调试。
-
直流电机
+关注
关注
36文章
1785浏览量
74235 -
PWM
+关注
关注
116文章
5892浏览量
226537 -
STM32
+关注
关注
2313文章
11191浏览量
374580 -
PID
+关注
关注
38文章
1505浏览量
91885 -
STM32F103C8T6
+关注
关注
114文章
166浏览量
89283
发布评论请先 登录
STM32F103C8T6核心板的资料合集免费下载
stm32F103 基于HAL库的直流电机驱动(一)

STM32F103C8T6实现直流电机速度PID控制



评论