 KUKA8.3系统WorkVisual AddOnVKR控制心得
KUKA8.3系统WorkVisual AddOnVKR控制心得

虚拟外部轴高级版本
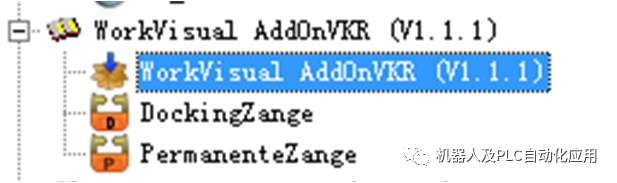
WorkVisualAddOnVKR 大众公司专用版本软件:
WorkVisualAddOnVKR是一个可后续加载的备选软件包,用于配置焊钳和线性滑轨。
WorkVisualAddOnVKR只賍用于通过软件KUKA.WorkVisual配置焊钳和线性滑轨。
在驱动装置接口的输入端和输出端与现场总线设备映射时,必须注意以下几点:
•仅支虚 PROFINET 或 Interbus类型的焊钳,以进行自动映射。
•仅支虚 BOOL 或 BYTE 类型的分组,以进行映射。
•在 PLC配置窗口中(菜单序列 编辑器> 备选软件包 >PLC 配置)映射模式 区段 必须是已进行了设置。
•输入端:必须至少有 10 个字节连续映射。
•输出端:在有 10 个字节连续映射时,字节 5 与字节 6 的映射必须隔开。
•输出端:在有 10 个字节连续映射时,字节 5 与字节 6 的映射必须隔开。
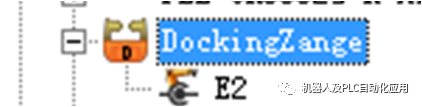
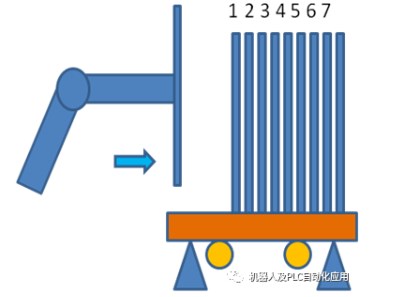
在配置时焊钳与一个或多个驱动装置接口连接。一个对接焊钳最多可以与 7 个驱动装置接口连接。一个固定焊钳只能与一个驱动装置接口连接。每个驱动装置接口与一个现场总线设备连接。
操作步骤:
1.双击焊钳。编辑器SynchroMove配置打开。
2.点击焊钳的连接点并按住鼠标键。
3.将鼠标指针拖到所需的驱动装置接口上并松开鼠标键。焊钳现在与驱动装置接口连接。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
plc
+关注
关注
5052文章
14813浏览量
488635 -
接口
+关注
关注
33文章
9601浏览量
157630 -
大众
+关注
关注
1文章
855浏览量
35252 -
KUKA
+关注
关注
3文章
218浏览量
17512
原文标题:KUKA8.3系统WorkVisual AddOnVKR控制心得
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
KUKA库卡机器人伺服驱动器相关型号举例
KUKA库卡机器人伺服驱动器(Servo Drive)是KUKA运动控制的重要组成部分,被普遍应用于工业机器人及数控加工中心等自动化设备中。是用来控制伺服电机的一种
发表于 09-08 16:30
西门子1500与KUKA工业机器人的Profinet通讯步骤
打开WorkVisual4.0并在线下载KUKA备份,有时候若你不知道使用该软件的哪种版本的话,你可以从机器人控制柜拷出来,一般机器人发货时会把能用到的软件都备份在机器人的控制柜内,这
KUKA8.3系统WorkVisual AddOnVKR控制心得
在配置时焊钳与一个或多个驱动装置接口连接。一个对接焊钳最多可以与 7 个驱动装置接口连接。一个固定焊钳只能与一个驱动装置接口连接。每个驱动装置接口与一个现场总线设备连接。

WorkVisual中的安全配置
新添加的机器人控制系统在 WorkVisual 中无局部安全配置。一个无安全配置的机器人控制系统的识别特征是,窗口项目结构的选项卡设备下的节点文字说明“安全控制” 为斜体:安全
简单介绍KUKA外部轴应用
对于旧的8.2X系统使用的外部轴插件是SynchroMove 对于最新8.3X系统 要分两种: WorkVisualAddOnVKR: 用于气伺服焊钳和其他软件控制电伺服焊钳或其他伺服

KUKA.Ethernet KRL.学习心得
EhternetKRL是KUKA提供的一个以太网通信功能的软件包,支持TCP和UDP协议.首先是软件包的安装,软件包的安装有两种方式,一种是操作示教器安装(常用的方法),另一种是通过WorkVisual安装,通过示教器安装是常用的方法,
如何创建WorkVisual项目
创建 WorkVisual 项目 -打开 WorkVisual 项目(始终使用机器人控制器中的项目) - 将控制设置为主动控制 从“目录”窗
WorkVisual将机器人控制系统配给实际应用的机器人控制系统步骤
用该操作步骤可将项目中的每个机器人控制系统分配给一个实际应用的机器人控制系统。然后,项目可从 WorkVisual 传输到实际应用的机器人控制系统中。
KUKA机器人系统变量$PRO_NAME所选程序的名称(参考解释器)
如果机器人控制器在Multi-Submit模式下操作(仅适用于KUKA系统软件8.3及更高版本),则变量无效。多提交模式下机器人控制器的
KUKA机器人密码介绍
在使用workvisual对程序进行更改时提示需要输入用户名与密码,此时一头雾水,机器人工程师也蒙圈,在查找资料后kuka的默认
发表于 05-19 17:33
•1.1w次阅读
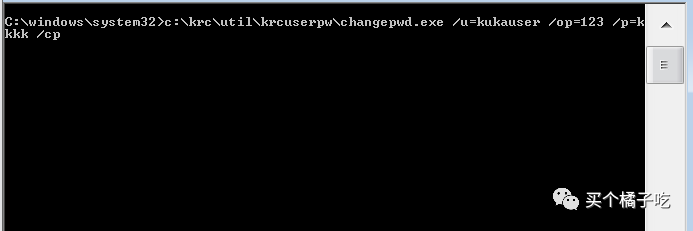
更改KUKA C 4 Windows系统的密码
或者可以通过 WorkVisual 更改密码。如果在机器人控制系统上安装了 KUKA.NonAdmin,则只能通过 WorkVisual 更改该密码。



评论