 WorkVisual中的安全配置范围包括哪些呢
WorkVisual中的安全配置范围包括哪些呢

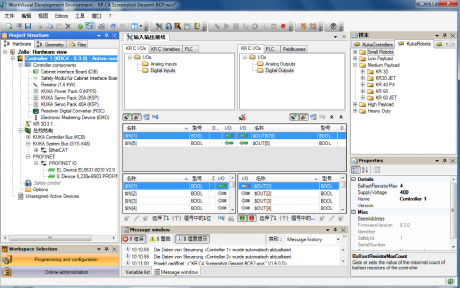
WorkVisual 中的安全配置
WorkVisual 中的安全配置包括以下范围:
1.局部安全配置
局部安全配置包括窗口局部安全配置中的参数。可编辑此参数。
2.与安全相关的通讯参数
此处主要指机器人网络内与安全通讯相关的参数。
无法直接显示或编辑与安全相关的通讯参数。WorkVisual 中不同的操作对与安全相关的通讯参数产生影响,例如:在配置 RoboTeam 时。
在将项目传输到实际应用的机器人控制系统时始终会一同传输整个安全配置。
编辑局部安全配置:
新添加的机器人控制系统在 WorkVisual 中无局部安全配置。一个无安全配置的机器人控制系统的识别特征是,窗口项目结构的选项卡设备下的节点文字说明“安全控制” 为斜体:安全控制
打开窗口局部安全配置时,在 WorkVisual 中将为机器人控制系统自动分配局部安全配置。最迟在编码生成时为机器人控制系统分配一个局部安全配置,如果之前还未分配的话。
局部安全配置可在 WorkVisual 中进行编辑。更改始终适用于当前设为激活的机器人控制系统。
局部安全配置参数:
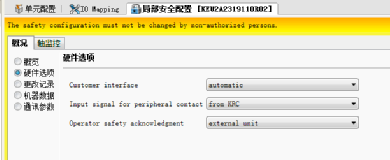
硬件选项:
客户接口:

此处必须选择应用哪个接口:
• ProfiSafe
• SIB
• SIB、SIB extended
• 具有运行模式输出端的 SIB
• 具有运行模式输出端的SIB,SIB extended
外部接触器 (US2) 的接通:

主接触器 2 可用作外围接触器,即可用作外围设备电源的开关元件。
关闭: 不使用外围接触器。 (默认)
通过外部 PLC: 外围接触器通过输入端 US2 由一个外部 PLC 切换。
通过 KRC: 外围接触器根据运行开通情况切换。如果运行许可,则接触器接通。
提示:
• 对于带外围接触器的机器人控制系统和“UL”选项,必须将该参数赋值为通过 KRC。
• 对于没有外围接触器的机器人控制统,该参数停用(默认设置)并且不显示。
系统变量 $US2_VOLTAGE_ON 显示外围电压 US2 的状态:
• TRUE:电压已接通。
• FALSE:电压已关闭。
确认操作人员防护装置:

若操作人员防护装置的信号在自动运行时消失并又重新出现,则必须对其进行确认,然后才可继续运行。
通过确认键: 例如:通过 (装在单元外的)确认键来确认。确认信息将传给安全控制系统。只有在确认后安全控制系统才给出自动运行的许可。
外部组件: 通过设备 PLC 确认。
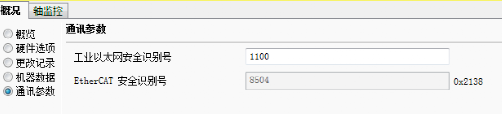
在此显示 Profinet 安全识别码。如果机器人控制系统被用作 PROFINET 设备,则需要这个识别码。如果 ProfiSafe 作为客户接口被选中,那么可以更改该识别码。
审核编辑:刘清
-
接触器
+关注
关注
64文章
1241浏览量
70239 -
Profinet
+关注
关注
9文章
2412浏览量
28453 -
机器人控制系统
+关注
关注
1文章
18浏览量
3869
原文标题:KUKA C 4-WorkVisual 中的安全配置
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
D358——功耗小,可单电源或双电源工作应用范围包括音频放大器、工业控制、DC增益部件和所有常规运算放大电路。
WorkVisual中的安全配置知识汇总
干货:如何通过连接真实的现场总线进行 WorkVisual 诊断
将GSDML文件接入到WorkVisual中




评论