 机器视觉运动控制一体机结构体功能上线,助力客户高效开发
机器视觉运动控制一体机结构体功能上线,助力客户高效开发


应用背景
运动控制器正朝着高速度、高精度、开放式的方向发展,不仅对运动控制功能精益求精,还增加了视觉相关的定位、测量、检测和识别等,多种功能的穿插使用进一步增加了在编程设计代码时的复杂程度。
为了给客户提供更好地软件框架,简化程序结构、节省内存空间、提高代码可读性。
正运动技术在VPLC532E机器视觉运动控制一体机上增加了结构体功能,方便客户在大型项目上更高效的进行项目开发。

VPLC532E是正运动推出的一款EtherCAT视觉总线控制器,控制器集成了2个千兆以太网以及2个USB3.0、2个USB2.0接口,支持多种工业相机,支持多种视觉功能和复杂的运动控制功能。

VPLC532E硬件介绍
1.集成RS232、RS485、CAN接口、2路USB3.0、2路USB2.0接口。
2.2路千兆EtherNet、1路百兆EtherCAT、6个本地轴接口。
3.24进12出数字IO,其中4路高速输出,4路高速输入、2路模拟量输出。
4.支持市场主流的USB3.0相机与GigE相机。
VPLC532E功能介绍
1.支持最多达32轴直线插补、任意空间圆弧插补、螺旋插补、样条插补。2.支持电子凸轮、电子齿轮、位置锁存、同步跟随、虚拟轴等功能。3.支持硬件比较输出(HW_PSWITCH2),硬件定时器,运动中精准输出。4.支持脉冲闭环,螺距补偿等功能。5.支持ZBasic多文件多任务编程。6.多种程序加密手段,保护客户的知识产权。7.掉电检测,掉电存储。
实现指令
1.STRUCTURE --结构体定义
Structure结构名称
Dim成员1名称[As数据类型1]
......
Dim成员n名称[(数组长度)][As数据类型1]End Structure
2.FLASH_WRITEDBL-- flash存储-double
FLASH_WRITEDBL sect_num [, varname] [, arrayname] [, arrayname(a)] [, arrayname(a,length)]
sect_num:flash块编号,不同类型不一样。
varname:变量名。
arrayname:数组名,可以为TABLE,VR,MODBUS。
a:操作的数组索引。
length:操作的数组元素个数。
结构体应用例程
该例程主要是对三轴的机械参数和配方文件以结构体框架来实现,通过结构体变量嵌套使用来减少变量,降低内存占用,提高代码的可复用性。
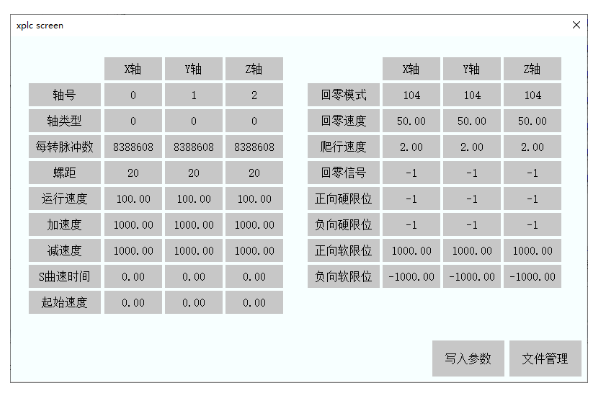
1.创建结构体变量
GLOBALSUBHMI_INIT() GLOBALgv_CurParamNum'当前配方号 gv_CurParamNum=0 GLOBALgv_PageNum'页码 gv_PageNum=0 GLOBALCONSTgv_SysMaxAxis=3'最大轴数 GLOBALSTRUCTUREAxisParam '''轴参数 DIMNo'轴号 DIMAxisAtype'轴类型 DIMAxisDpos'轴的当前位置 DIMOnePulses'轴电机一圈脉冲数 DIMAxisPitch'轴螺距 DIMAxisSpeed'轴的运动速度 DIMAxisAccel'轴的加速度 DIMAxisDecel'轴的减速度 DIMAxisSramp'轴的S曲线时间 DIMAxisLspeed'轴的起始速度 DIMFsLimit'轴正限位 DIMRsLimit'轴负限位 '''回零参数 DIMDatumMode'轴回零模式 DIMBackZeroSpeed'轴的回零速度 DIMAxisCreep'轴的回零第2段速度 DIMDatumIn'轴原点信号 DIMFwdIn'轴正限位信号 DIMRevIn'轴负限位信号 ENDSTRUCTURE GLOBALSTRUCTURESysParam DIMSysAxis(gv_SysMaxAxis)ASAxisParam'系统轴数 DIMFileName(50)'参数文件名 ENDSTRUCTURE GLOBALgs_SysParam(50)ASSysParam'定义系统结构体变量 LOCALlv_i FORlv_i=0togv_SysMaxAxis-1 '初始化轴参数变量 gs_SysParam(0).SysAxis(lv_i).No=lv_i gs_SysParam(0).SysAxis(lv_i).AxisAtype=0'轴类型 gs_SysParam(0).SysAxis(lv_i).OnePulses=8388608'轴电机一圈脉冲数 gs_SysParam(0).SysAxis(lv_i).AxisPitch=20'轴螺距 gs_SysParam(0).SysAxis(lv_i).AxisSpeed=100'轴的运动速度 gs_SysParam(0).SysAxis(lv_i).AxisAccel=1000'轴的加速度 gs_SysParam(0).SysAxis(lv_i).AxisDecel=1000'轴的减速度 gs_SysParam(0).SysAxis(lv_i).AxisSramp=0'轴的S曲线时间 gs_SysParam(0).SysAxis(lv_i).AxisLspeed=0'轴的起始速度 '初始化回零参数变量 gs_SysParam(0).SysAxis(lv_i).DatumMode=104'轴的回零模式 gs_SysParam(0).SysAxis(lv_i).BackZeroSpeed=50'轴的回零速度 gs_SysParam(0).SysAxis(lv_i).AxisCreep=2'轴的回零第2段速度 gs_SysParam(0).SysAxis(lv_i).DatumIn=-1'轴的回零信号 gs_SysParam(0).SysAxis(lv_i).FwdIn=-1'轴的正向硬限位信号 gs_SysParam(0).SysAxis(lv_i).RevIn=-1'轴的负向硬限位信号 gs_SysParam(0).SysAxis(lv_i).FsLimit=1000'轴正限位 gs_SysParam(0).SysAxis(lv_i).RsLimit=-1000'轴负限位 '初始化参数文件 gs_SysParam(0).FileName="NONE"'初始化参数文件名 NEXT FORlv_i=0to49 gs_SysParam(lv_i)=gs_SysParam(0)'初始化其他配方参数 NEXT ENDSUB
2.保存配置文件
GLOBALSUBSaveCurParam()
LOCALiflsflag
iflsflag=70214733
FLASH_WRITEDBLgv_CurParamNum,iflsflag,gs_SysParam(gv_CurParamNum)
?"下载成功"
ENDSUB
3.读取配置文件
GLOBALSUBLoadCurParam() LOCALiflsflag,lv_i,addnum FORlv_i=0TO49 iflsflag=0 FLASH_READDBLlv_i,iflsflag IFiflsflag=70214733THEN FLASH_READ2DBLlv_i,1,gs_SysParam(lv_i) addnum=addnum+1 ENDIF NEXT ?"上传完成,上传配置文件数:"addnum ENDSUB
4.删除配置文件
GLOBALSUBDeleCurParam() LOCALlv_i FORlv_i=0togv_SysMaxAxis-1 '初始化轴参数变量 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).No=lv_i gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisAtype=0'轴类型 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).OnePulses=8388608'轴电机一圈脉冲数 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisPitch=20'轴螺距 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisSpeed=100'轴的运动速度 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisAccel=1000'轴的加速度 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisDecel=1000'轴的减速度 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisSramp=0'轴的S曲线时间 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisLspeed=0'轴的起始速度 '初始化回零参数变量 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).DatumMode=104'轴的回零模式 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).BackZeroSpeed=50'轴的回零速度 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).AxisCreep=2'轴的回零第2段速度 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).DatumIn=-1'轴的回零信号 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).FwdIn=-1'轴的正向硬限位信号 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).RevIn=-1'轴的负向硬限位信号 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).FsLimit=1000'轴正限位 gs_SysParam(gv_CurParamNum).SysAxis(lv_i).RsLimit=-1000'轴负限位 '初始化参数文件 gs_SysParam(gv_CurParamNum).FileName="NONE"'初始化参数文件名 NEXT LOCALiflsflag iflsflag=0 FLASH_WRITEDBLgv_CurParamNum,iflsflag,gs_SysParam(gv_CurParamNum) ?"删除成功" ENDSUB
本次,正运动技术机器视觉运动控制一体机结构体功能上线,助力客户高效开发,就分享到这里。
更多精彩内容请关注“正运动小助手”公众号,需要相关开发环境与例程代码,请咨询正运动技术销售工程师。
本文由正运动技术原创,欢迎大家转载,共同学习,一起提高中国智能制造水平。文章版权归正运动技术所有,如有转载请注明文章来源。
审核编辑黄宇
-
机器视觉
+关注
关注
166文章
4832浏览量
126553 -
一体机
+关注
关注
0文章
1343浏览量
34887 -
自动化
+关注
关注
31文章
5990浏览量
90703 -
运动控制
+关注
关注
5文章
840浏览量
34690
发布评论请先 登录
工控一体机常见结构类型介绍|外嵌入式、内嵌入式、壁挂式一体机

慕尼黑上海电子设备展,正运动机器视觉运动控制一体机应用预览(三)


Nullmax MaxDrive Basic智能前视一体机及小域控方案

工业一体机针对工业机器视觉需求开发的一种集成化系统被广泛应用



评论