 myCobot 320机械臂,气动末端执行器的好帮手
myCobot 320机械臂,气动末端执行器的好帮手

主题
在这里,我们想介绍如何将气动末端执行器与myCobot 320结合使用。他们分别能做什么?
关于电动夹持器的文章摘要:
● 什么是夹持器?
● 夹具是如何驱动的?
● 两个电动夹具的参数和方案
气动 VS 电动
在当前的工业自动化领域,气动末端执行器由于设备成本低、产品型号丰富、应用范围广,仍然主导着市场。
电动末端执行器使用电力而不是高压空气作为能量。与液压末端执行器相比,该系统易于维护,不需要使用液压能,从而减少了能源污染。
电动末端执行器在性能和结构上优于液压和气动末端执行器,是末端执行器行业的未来趋势。目前,气动末端执行器仍占据行业领先地位。
我的协作机器人 320
我们仍然使用myCobot 320来适应气动驱动设备。
myCobot 320 是一款六轴机械臂,具有广泛的功能,可配备各种执行器,如夹持器、抽吸泵等。它特别适合教育和研究。

myCobot 320拥有丰富的开源资源,支持Python、C++、C#等多种开发方式。这使用户可以快速设置和运行应用程序,即使是初学者也可以轻松操作机械臂。
以下是我们将要讨论的气动设备。总共三个,两个抓手和一个抽吸泵。
设备
空气压缩机
气动装置的能量来源是什么?是高气压。我们需要一台机器来产生高气压,为气动设备提供能源。下图是一台空压机。

空压机一旦通电,就可以在机器中积聚高压空气,为后续使用提供动力。
软夹持器

功能:抓取物体(较大尺寸)
介绍:
●当我们使用其他夹持器抓取时,很容易损坏物体的表面,触感柔软的夹持器以夹紧的边缘夹住面板或组件,确保完美的表面和提高产量。
● 柔软触感抓手的模块化设计,重量轻,可根据面板尺寸自由排列和组合。
● 常规气缸的锁模力一般较大,难以控制,夹紧板边缘容易夹紧翘曲。软夹持器的单指夹持力精确控制,不会夹紧易碎的工件。
工作原理:
软抓手是一种创新的仿生柔性工具,由研究人员开发,用于模仿海星手腕的形态。软爪的“手指”由柔性高分子硅胶材料制成,该材料充气用于弯曲变形,并且可以像海星一样自适应地缠绕在目标物体上,以完成对形状和易碎物体的完美抓取。
下图显示了其参数。

空气平行夹具

功能:抓取物体(更小的尺寸)
介绍:
● 气动抓手,又称气动指或气动指,是一种以压缩空气为动力源抓握或抓取工件的致动装置。体积小,重量轻,外形紧凑,可实现单向和双向抓取,可自动对准,重复精度高,磁性开关可实现自动控制。
● 其主要功能是代替人工抓取工作,可有效提高生产率和工作安全性。
工作原理:
● 单活塞:相反,轴驱动曲柄,钳口由活塞驱动以打开和关闭运动。两个钳口中的每一个都有一个相应的曲柄槽。为了减少摩擦阻力,钳口通过钢球滑块连接到主体。
● 双活塞:由两个活塞驱动,每个活塞通过滚轮和双曲柄与气动指连接,形成一个特殊的驱动单元。气动手指始终轴向对齐,每个手指不能单独移动。如果手指向相反方向移动,则先前加压的活塞将耗尽,而另一个活塞将加压。
下图显示了其参数。


真空吸盘

功能:吸收更大更重的物体
介绍:
● 真空吸气泵是将真空吸入吸盘,使内部气压由大气压变为负压的吸气口,利用外部大气压与该负压之间的压差来达到吸附物体的目的。
● 整体结构为多功能、可扩展的吸盘,最多可容纳4个。
工作原理:
● 真空装置启动,在吸盘内产生负气压,使被提升的物体通过吸入到位即可运输。
●当物体被运送到目的地时,将其顺利充气到真空吸盘中,使真空吸盘从负气压变为零或正气压,真空吸盘与物体分离。
下图显示了其参数。

总结
在两篇文章之后,您是否为您的机械臂找到了末端执行器?电动还是气动?它们各有优势,末端执行器的选择取决于其使用环境。如果您有任何问题想问,请随时在下面发表评论!您的喜欢和评论是我们的动力。
审核编辑 黄宇
-
机器人
+关注
关注
213文章
31449浏览量
223673 -
机械臂
+关注
关注
14文章
601浏览量
26186 -
大象机器人
+关注
关注
0文章
87浏览量
405
发布评论请先 登录
机器人主控核心板米尔RK3576 + ROS2,NPU加速实现目标跟随与机械臂抓取
大象机器人myCobot 320机械臂如何凭实力走进顶尖学府
音圈执行器解锁高端制造新可能
磁性执行器选型指南:矩形与圆柱形全解析
音圈执行器如何助力智能制造?速程精密给出高效答案
智能执行器颠覆汽车技术
从设计到落地,音圈执行器如何适配你的自动化需求?
传感器和执行器之间有什么关系?
直线旋转执行器 vs 传统执行器:优势差异究竟在哪里?
速程精密:以直线旋转执行器技术,驱动未来工厂梦想
哈默纳科执行器系列产品介绍
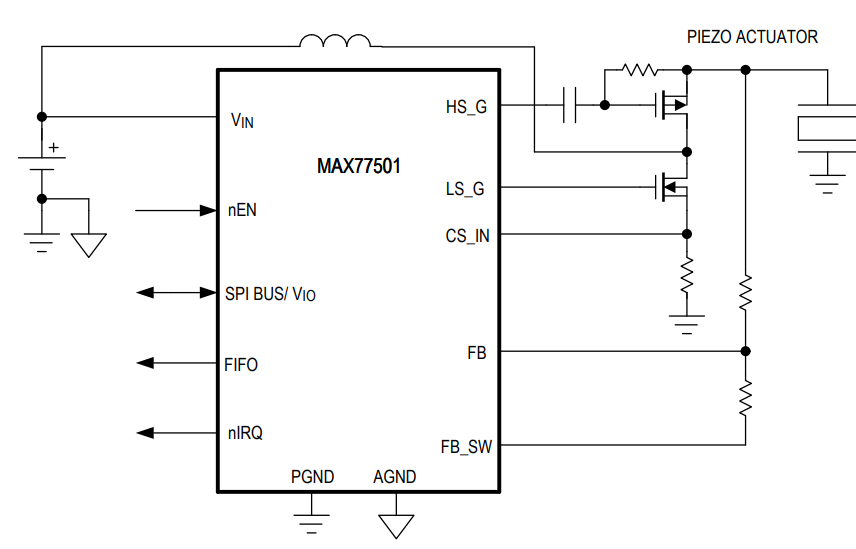
Analog Devices / Maxim Integrated MAX77501压电触觉执行器升压驱动器特性及应用电路
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品




评论