 Wrap 函数:绝对坐标中旋转分度的简化位置控制
Wrap 函数:绝对坐标中旋转分度的简化位置控制

随着最近的趋势集中在提高工程效率,许多产品已经开发出来专门帮助缩短机器自动化的设计周期。提高效率的一部分是使产品更易于使用,因此可以将额外的时间和资源花在其他地方。这篇文章描述了一个产品功能,可以降低索引表应用程序的管理复杂性。
 |
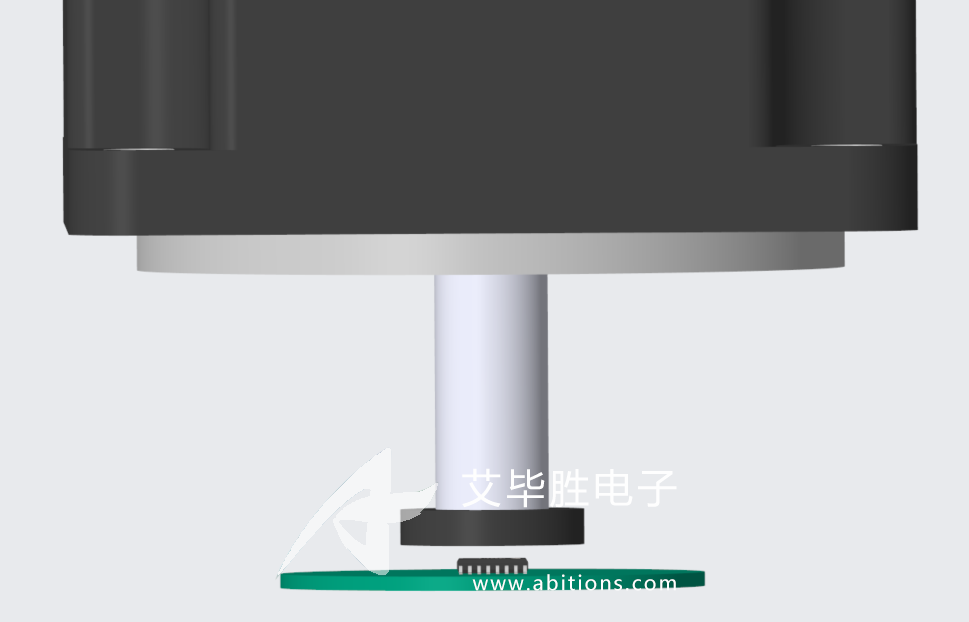
应用示例:旋转分度台,沿同一方向重复旋转固定距离。分度台下方安装了电动旋转执行器。 下面的产品视频展示了注射器点胶应用的类似应用示例;还带有旋转执行器。 |
| 对于沿同一方向重复旋转固定距离的分度台,由于内部位置计数器值不断增加,因此位置管理会很困难。在操作员了解桌子实际面向的位置之前,需要进行一些数学计算以将步数转换为度数。 |
例如,假设我们使用基本步进分辨率为每转 200 步或每步1.8° 的电机一次定位 90 度。位置计数器值将如下所示:
| 脚步 | 0 | 50 | 100 | 150 | 200 | 250 | 300 | 350 | 400 | 450 | 500 |
| 学位 | 0° | 90° | 180° | 270° | 360° | 450° | 540° | 630° | 720° | 810° | 900° |
在转台上,相同的分度位置在360度后重复出现,需要计算360度内的实际位置坐标。
这是计算实际位置坐标的简单公式。
实际位置 = 当前位置(以度为单位)-(360 x 行驶的转数)
对于 900°,旋转台已旋转超过 2 圈,因此公式为:
实际位置 = 900° - (360° x 2) = 180°(从起始位置)
有没有更简单的方法来做到这一点?
| 挑战 |
| 通过转换为绝对坐标而不是步骤更好地管理 360° 坐标 |
对于分度台的定位管理,如果位置计数值可以以度为单位设置,并且超过360°后清零位置计数器,则更容易监控台面位置。对于上面的示例,位置值可以从步数转换为度数,这让生活变得更轻松了。其他功能,例如Wrap Proximity Positioning和Wrap Absolute Positioning,可用于使位置控制和管理更加容易。
| 解决方案 |
| 在适当的时候使用Wrap Function来重置位置计数器 |
当电机输出轴超过设定值时,Wrap 功能会自动将位置计数器值重置为 0。例如,当“Wrap Setting Range”设置为“1 转”时,当电机轴从原点位置超过 360°时,位置计数器值自动重置为 0。齿轮比也可以添加到额外的调整中。
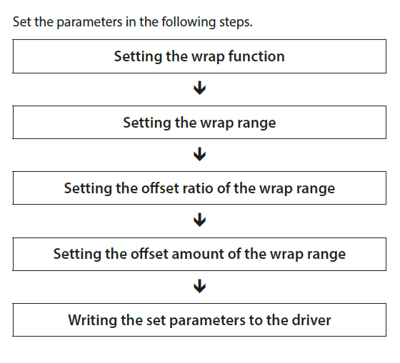
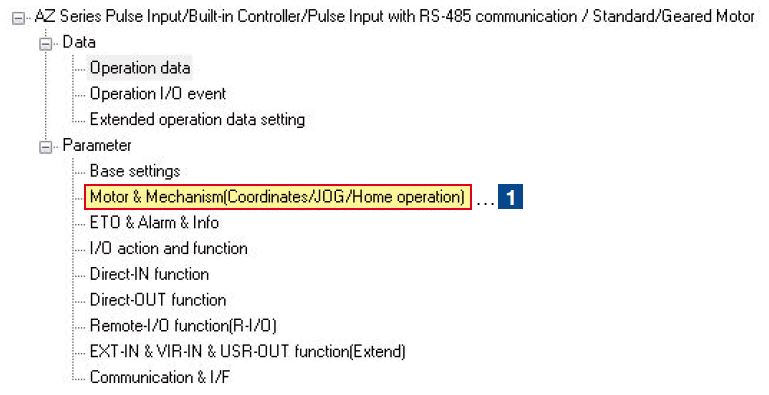
在这里,我们向您展示了专用MEXE02 支持软件的屏幕截图,其中包含 Wrap 参数设置。
左侧菜单:
中心窗口:
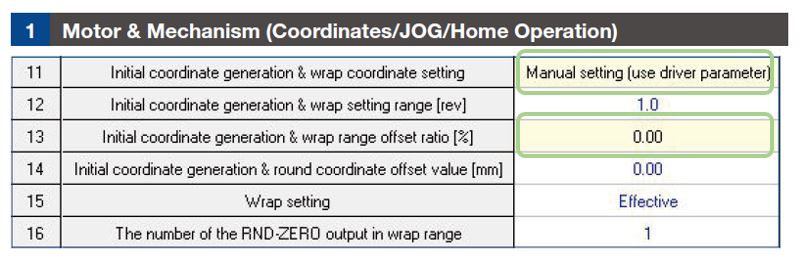
圈出的参数已从其默认值更改以实现此目的。
| 初始坐标生成和环绕坐标设置 |
要使用环绕功能,请选择手动 设置。 设置范围:ABZO传感器或手动 |
| 初始坐标生成和环绕设置范围 (rev) |
设置环绕范围。 电机旋转了 此处设定的次数后,指令位置返回 0。 设置范围:5 至 655,360(1=0.1 转) |
| 初始坐标生成和环绕范围偏移率 (%) |
设置环绕范围的偏移率。 设置范围:0 到 10,000 (1=0.01%) |
| 环绕设置 | 启用或禁用 |
| 环绕范围内 RND-ZERO 输出的编号 |
设置在环绕范围内打开 RND-ZERO 输出的次数 。 设置范围:1至536,870,911格 |
这是一个视频,向您展示如何使用MEXE02 支持软件为 Oriental Motor 的旋转执行器设置 Wrap Function 参数。
奖励:通过此视频教程了解您可以执行的各种类型的环绕定位操作。
有关环绕功能的更多信息,请参阅* * DG II 系列是 AZ 系列的中空旋转执行器版本的第 40 页。
|
产品亮点:DG II 系列旋转执行器 低调 提供交流和直流版本 60/85/130/200 毫米框架尺寸 内置绝对位置传感器 允许扭矩高达 50 Nm (440 lb-in) 力矩负载高达 100 Nm (880 lb-in) 推力负载高达 900 磅(408 千克) |
 |
 |
 |
审核编辑黄宇
-
电机
+关注
关注
145文章
9696浏览量
154744 -
定位
+关注
关注
5文章
1607浏览量
36762
发布评论请先 登录
绝对式旋转编码器常用什么类型磁铁?

绝对型旋转编码器:工业智能时代的“空间坐标仪”

iC-Haus磁性离轴绝对位置编码器芯片iC-MUE产品介绍
探索PSCM绝对霍尔效应多圈传感器:电子工程师的新宠
开启电子革命:HRPM霍尔效应旋转位置传感器深度解析
探索HRPS霍尔效应旋转位置传感器:工业与交通领域的理想之选
高精度绝对式编码器:工业自动化的“智慧之眼”

Vishay RAIK060 旋转绝对感应套件编码器技术解析
国产自主可控全自动旋转测座:中图仪器ACH100T、ACH100S系列

ADI安全产品如何简化不同机器人控制系统中安全机制的实现

绝对值旋转型编码器:工业自动化领域的“智慧之眼”
使用位置传感器进行无刷电机控制

Analog Devices Inc. ADMT4000通电多圈位置传感器数据手册
绝对位置感知的机器人多关节模组高精度运动学解算与动态误差补偿



评论