 当自主机器人化身小跟班一样的行李箱,让你省心省力
当自主机器人化身小跟班一样的行李箱,让你省心省力

谈及“自主移动机器人(AMR)”时,许多人想到的是在订单履行中心、仓库或各种工业应用中工作的相对较大的机器人系统。过去,鲜有人会想到尽职尽责跟随主人全球奔波的、由人工智能/机器学习(AI/ML)驱动的拉杆箱。更鲜有人会料想到这项技术能够在今天实现商用。家用AI/ML系统和机器人技术的曙光已经出现。为了进一步推动这场革命,工程师必须克服一些硬件和软件障碍,才能通过TSA认证,并在紧凑空间内安装所有必要的电子系统,既不会显著增加重量,同时还保持成本竞争力。
本文将向读者介绍小型消费类AMR系统(特别是行李箱)的发展趋势,并讨论小型消费类AMR系统走向大规模市场所涉及的各种硬件和软件问题以及设计挑战。
面向21世纪旅客的AMR行李箱
对于大多数人而言,长途旅行最大的拖累莫过于拖着行李箱辗转于各大机场、火车站和公共汽车站。然而,令人不解的是,过去十几年间,行李箱的设计却鲜有创新。尽管行李箱在过去的20年间经历了彻底的审美革新,但真正的技术进步却寥寥无几。幸运的是,这一切最近都发生了变化。现有的市售AMR行李箱系统被设计为仅使用板载系统跟踪并跟随其主人。
这是典型智能行李箱的重大进步,这些行李箱内置可为智能手机充电的电池、GPS定位、开箱检测功能,甚至还有可供用户骑座的设计。借助新型AMR行李箱系统,AI/ML技术用于在整个缭乱喧嚣的旅途中为用户导航,从家出发,经过中转站,并最终到达目的地。这类导航需要复杂的视觉系统、接近检测系统、智能手机接口以及移动机器人电子设备。
小型消费类AMR系统设计面临的挑战
与工业AMR系统不同,消费类AMR行李箱相对较小,必须保持重量轻且易于使用,即便在不使用时亦如此。此外,工业机器人设计为在本身比较危险的工业环境中保持安全,而消费类AMR则必须在控制较少的环境中工作。因此,除了考虑移动机器人高效、可靠且响应迅速的普遍需求外,小型/个人AMR行李箱系统还必须考虑繁忙交通枢纽和用户注意力被分散的混乱情况。这需要相对复杂的AI/ML在意外碰撞不可避免的混乱环境中进行跟踪、跟随和导航。
AMR AI/ML视觉系统和接近传感器
虽然2D摄像头图像可以提供背景环境,但仍然需要一个接近系统来确定与物理对象的距离和深度。因此,传感器融合对于小型AMR行李箱而言至关重要,因为人们希望这种行李箱无需过多指引就能跟随用户左右。
相较于常规2D摄像头图像,传感器融合是机器人系统更深入了解环境的常用方法。机器人视觉系统过去相当庞大且昂贵,但现在随着视觉系统不断减小,接近传感器的封装也变得更加紧凑,更容易用于机器视觉。
为了让AMR行李箱保持现代行李箱的纤巧美感,接近传感器和视觉系统必须足够紧凑,以适应流线型的轮廓而不显得突兀。这给视觉和接近系统施加了额外的空间限制,并且需要更高水平的集成,因此可在单个紧凑型PCB上使用综合视觉和接近系统。为减轻AMR电子设备的重量以方便手动操作,这种实现超紧凑尺寸的方法也十分必要。
因此,在小型封装中使用不可见940nm红外(IR)光的飞行时间传感器可能是此类应用的理想选择。透镜在IR频率下为光学透明,而在可视光频率下相对不透明,从而保护IR传感器。此外,目标颜色和反射比不变量包括采用垂直腔面发射激光(VCSEL)IR技术进行飞行时间感测的传感器,如下图1就是一款非常适合用于AMR行李箱的VCSEL飞行时间红外接近传感器。

图1:511-VL53L5CXV0GC/1的功能图
(图源:贸泽电子)
AMR的移动系统
移动系统是小型AMR的一个主要设计点。小型AMR系统的响应能力、效率和可靠性在很大程度上取决于设计质量以及AMR移动系统所选择的设备/组件。典型的AMR移动系统包括电机、电机驱动器、电机控制系统以及储能装置(通常为电池)。高效电机控制微控制器单元(MCU)可能是此类紧凑型低功耗应用的理想选择。其他电机控制解决方案即使可以实现更高的性能,但能效或许较低且占用空间更大,例如现场可编程门阵列(FPGA)解决方案。
小型消费类AMR行李箱可能会使用小型无刷直流(BLDC)电机,通常为三相,以实现该应用所需的响应能力和效率。不过BLDC电机需要专门的电机控制器和驱动技术,要同时驱动三个独立的相位,并具有传感器输入能力和足够的功率来承担BLDC电机控制算法的计算负载。
过去,像这样的电机控制系统需要对每个功能进行完整的定制设计,并需要必要的资源来迭代设计功能解决方案。如今,含嵌入式MCU的BLDC电机控制器可提供高度集成的解决方案,比先前集成度较低的方法更为紧凑甚至高效。这些高度集成的解决方案有助于缩短开发时间、减小PCB面积并尽量降低总体物料清单(BOM)的复杂性。
高度集成的电机控制器/MCU,如STMicroelectronics STSPIN32G4,可在单个封装中提供高级电机控制功能和处理。图2就采用STSPIN32G4系统级封装(SiP)与STL110N10F7功率MOSFET。
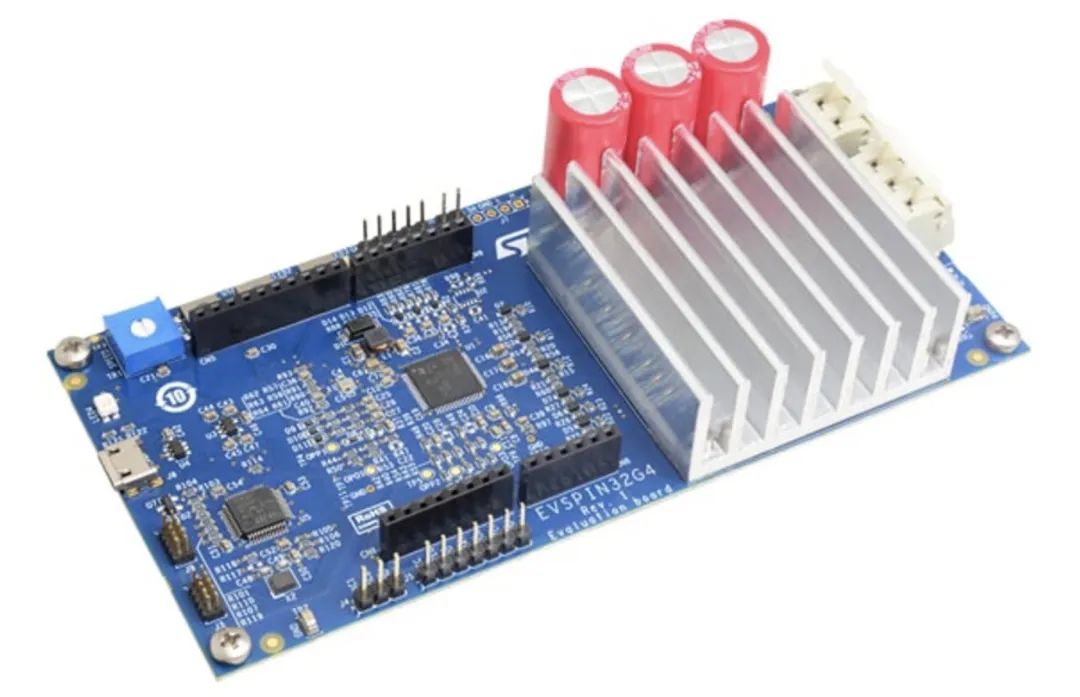
图2:STMicroelectronics EVSPIN32G4演示板
(图源:贸泽电子)
AMR的无线通信
即便是小型消费类AMR行李箱,用户也需要能够通过普通方式轻松获取和控制。此外,无线(OTA)升级让现代电子产品大受裨益,尤其是AMR行李箱之类的新颖实验性产品。这意味着AMR行李箱系统还需要整合各种无线标准以兼容用户的智能手机,还可连接到其他IEEE 802.15.4无线协议以进行测试、诊断或集成其他智能家居功能。
鉴于AMR行李箱的空间和功率限制,单独的无线芯片会显著增加电路板面积,尤其是在考虑需要保持设计的电磁兼容(EMC)合规性时。因此,内置无线功能,例如低功耗蓝牙5(BLE5)和IEEE 802.15.4通信协议的微控制器,可以显著简化开发过程,更快地开发具有无线功能的AMR行李箱(图3)。
下图所示的多协议无线微控制器片上系统(SoC)对物联网设备的设计和开发大有裨益,同时还能延长应用的电池寿命。
结语
尽管飞行汽车仍在开发当中,但自动跟随用户、包揽长途旅行中一些苦差事的机器人行李箱今天已经问世。未来将出现更多的机器人行李箱创意,所有这些创意都必须能够在高度紧凑的封装中安装自主移动机器人系统,同时确保安全性和使用方便性。
-
机器人
+关注
关注
213文章
31402浏览量
223560 -
AMR
+关注
关注
3文章
483浏览量
32285 -
自主机器人
+关注
关注
0文章
20浏览量
8077 -
贸泽电子
+关注
关注
17文章
1221浏览量
100383
原文标题:当自主机器人化身小跟班一样的行李箱,让你省心省力
文章出处:【微信号:贸泽电子,微信公众号:贸泽电子】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
北京人形具身天工3.0斩获全球首个全自主机器人勇士挑战赛冠军
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
智能行李箱:霍尔元件如何重塑出行体验?——以无锡迪仕DH629为例

为何你的机器人手臂“知觉”存在偏差?探秘力传感器的奥秘
智能机器人从0到1系统入门课程 带源码课件 百度网盘下载
建材检测行业,移动作业机器人上下料,让混凝土养护效率翻倍!

小型自重构机器人能不能帮忙做一个?
复合机器人在机加工产线无人化中的应用与技术发展
霍尔元件在智能行李箱中的革新应用:无锡迪仕DH629开启第二代智慧出行时代
为什么复合机器人是未来无人化工厂的核心设备?

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
当复合机器人碰到障碍物,会触发怎样的智能绕障机制?
恩智浦自主移动机器人设计要点

重新定义移动伴侣,飞睿UWB如何让物品实现智能跟随?




评论