 RX72M单芯片EtherCAT伺服方案(下)操作说明与规范
RX72M单芯片EtherCAT伺服方案(下)操作说明与规范

3. 操作说明
3.1 TwinCAT控制电机
本文档使用的EtherCAT工具是:TwinCAT 3。假设用户已经成功安装了TwinCAT 3,这里不再赘述TwinCAT的安装过程。
1
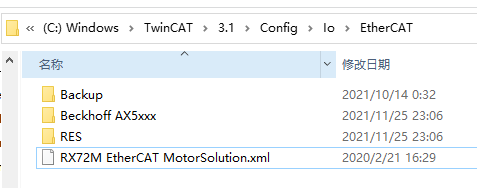
复制EtherCAT_ESI文件夹下面的文件RX72M EtherCAT MotorSolution.xml到TwinCAT 3的安装目录——C:TwinCAT3.1ConfigIoEtherCAT (默认安装路径)。
2
使用网线连接控制板的 网口J15 (ECAT_IN)和电脑端的网口。
3
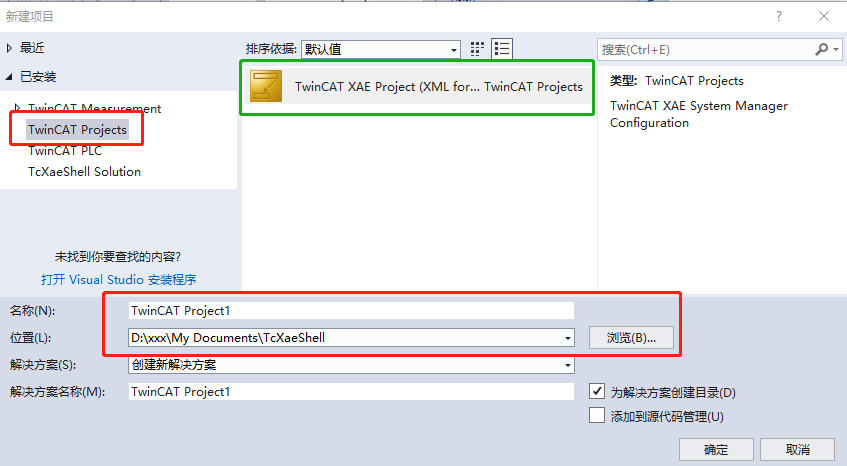
在开始菜单里选择:
[Beckhoff]→[TwinCAT3]→[TwinCAT XAE Shell],启动TwinCAT3。在TwinCAT3的界面选择:[文件]→[新建]→[项目],弹出如下对话框,然后在左边选择[TwinCAT Project],并在下面的红框处选择项目的路径位置和项目名称。
4
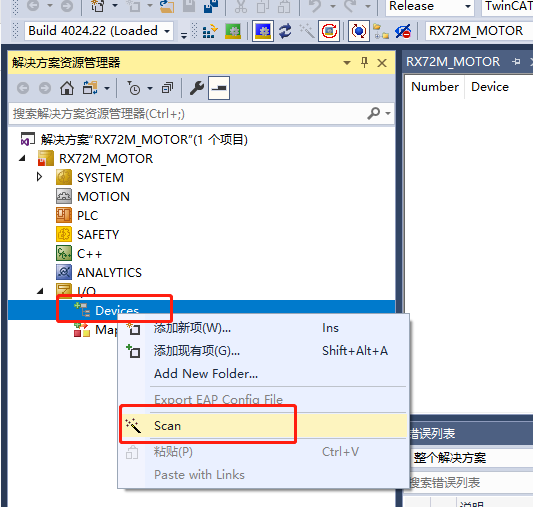
在解决方案资源管理器窗口,选择[I/O],展开并选中[Device],在右键菜单选择[Scan]。如下图。
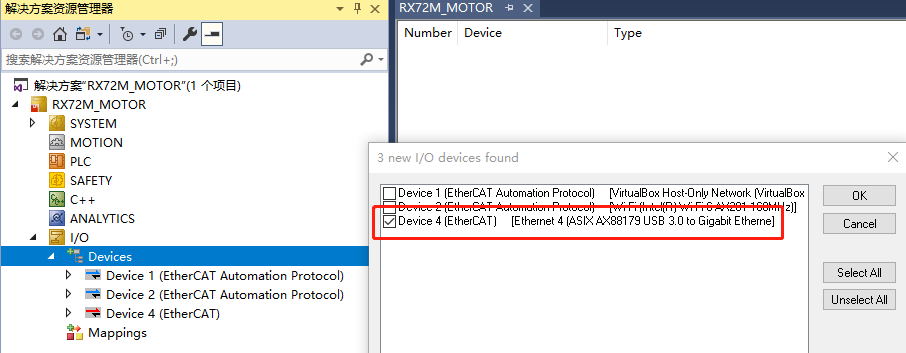
• 在弹出的小窗口点击确认后,开始扫描网络端口,并弹出如下图的网络列表。连接了网线的本地网口设备会显示在列表中,并且如图的红框所示,前面有“√”选中。
• 如果连接的网线的网卡前面没有“√”出现,则代表TwinCAT没有扫描到网络上连接的EtherCAT从站设备。
5
如右图所示,是扫描后的结果,绿色框是扫描到的项目,如果下面的绿色框显示[Box1 (PFFFFFFFF RFFFFFFFF)],则表示该从站设备的EEPROM里没有写入ESI描述信息。
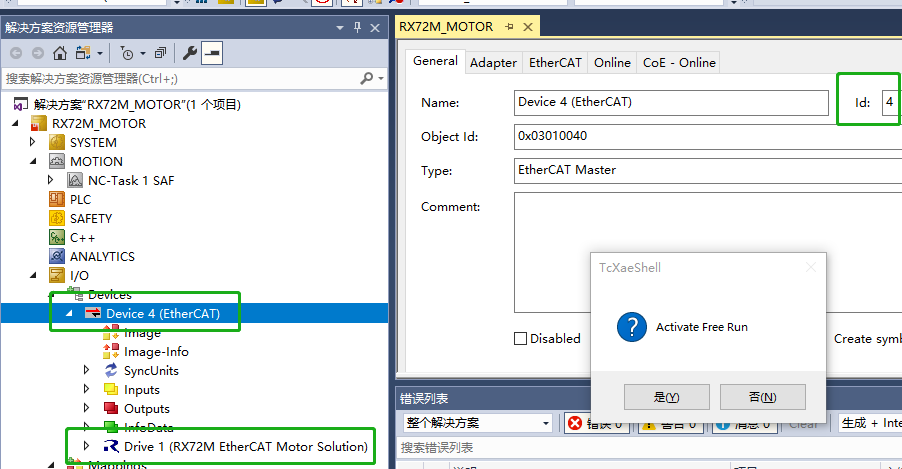
6
按照下图的顺序操作,可以写EEPROM。
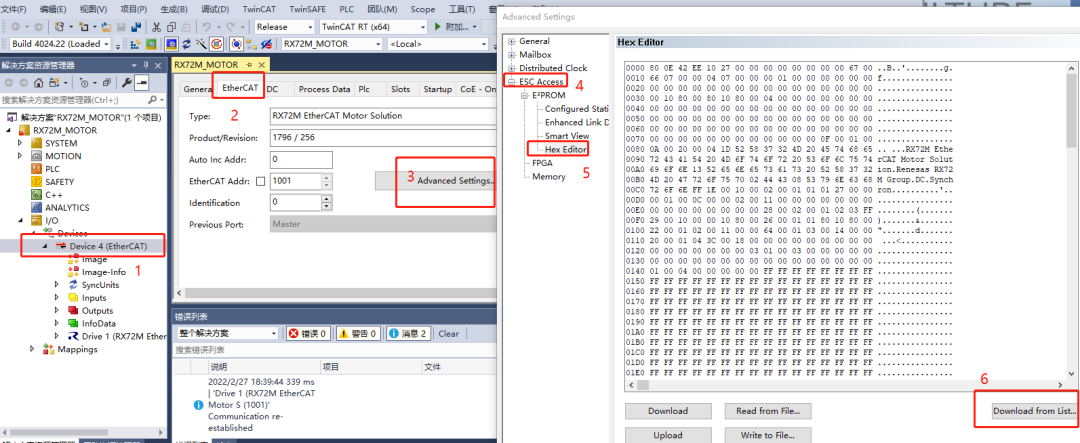
7
在上一页扫描到设备的窗口点击[是]后,从站设备应该自动进入[OP]模式,TwinCAT跟从站设备之间的网络通信已建立。
• 按照下图的绿色框信息,确认从站是否处于正确的工作状态。不能进入Current State: OP,则是网络工作不正常,可能由网络质量差导致的。
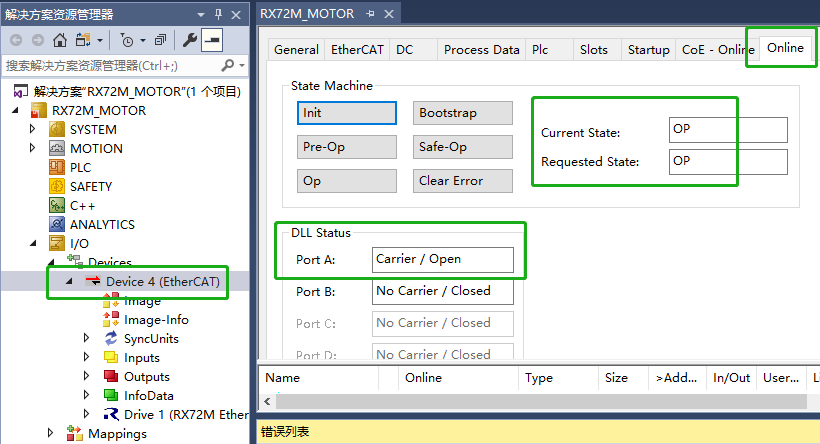
• 如果DLL Status窗口,比如Port A状态:是Open / Closed轮流跳变,则表示PHY的配置不正确引起PHY_LINK信号不稳定(如果插好网线,PHY_LINK是固定电平)
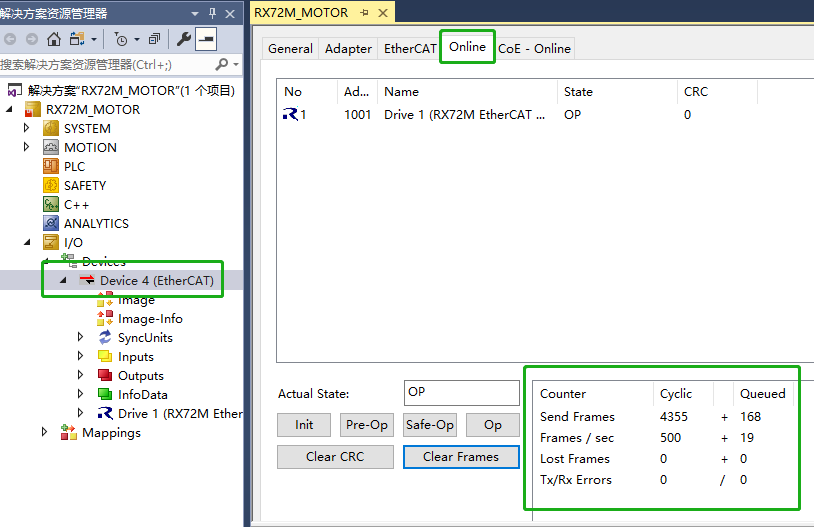
• 如下窗口:可以检查网络质量,如果Lost Frames和Tx/Rx Errors项目不是0,也会导致从站不能进入OP状态。
8
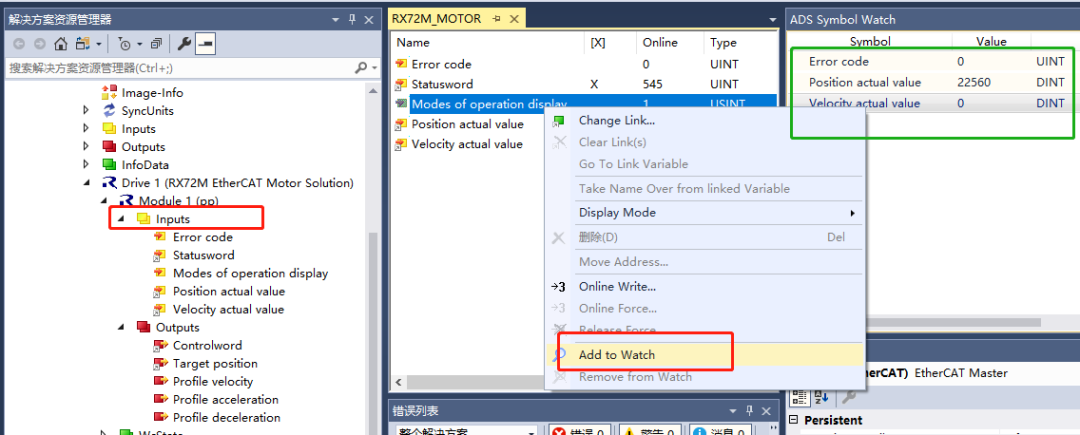
如下图,左边Module 1展开,是在pp(position profile)模式下的输入/输出的数据,这里的方向是相对主站来说的。按照下图的操作,在输入参数的右键菜单里选择[Add to Watch],可以把输入参数显示到右边的ADS Symbol Watch窗口,这样在后面修改Outputs参数控制电机的时候,方便观察Inputs 数据变化。
9
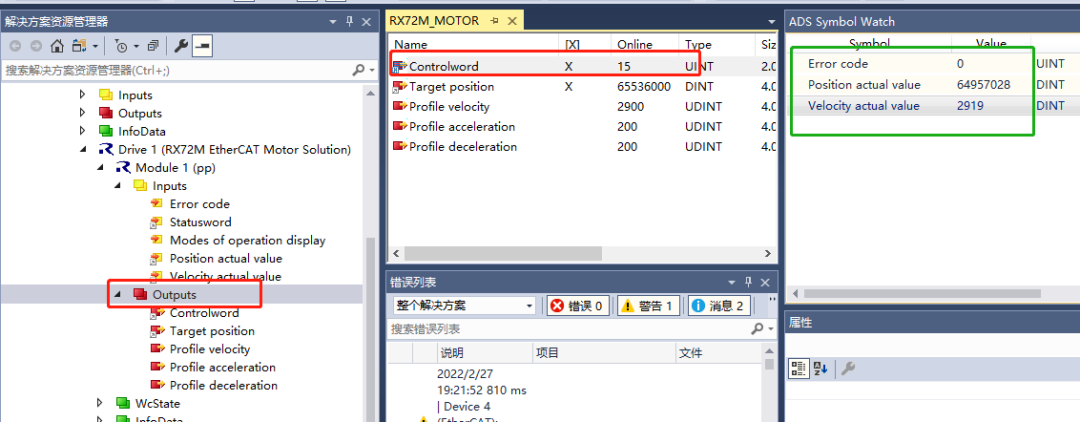
按照下图的显示,先修改Outputs数据的项目:Target position / Profile velocity / Profile acceleration / Profile deceleration。
• 然后依次修改[Controlword]: 0→7 →15,电机就可以转起来了,右边窗口可以观察速度和当前的位置信息,可以看到电机加速匀速减速的过程,当位置信息[Position actual value]变成跟[Target Position]一致后,电机就停止转动了,此时,电机轴是锁紧状态,用手是拧不动的,电机的电流和力矩会随着手上拧的力越大,变得越来越大。所以此时电机还是处于工作状态。这时需要把[Controlword]写入0,电机才停止工作。
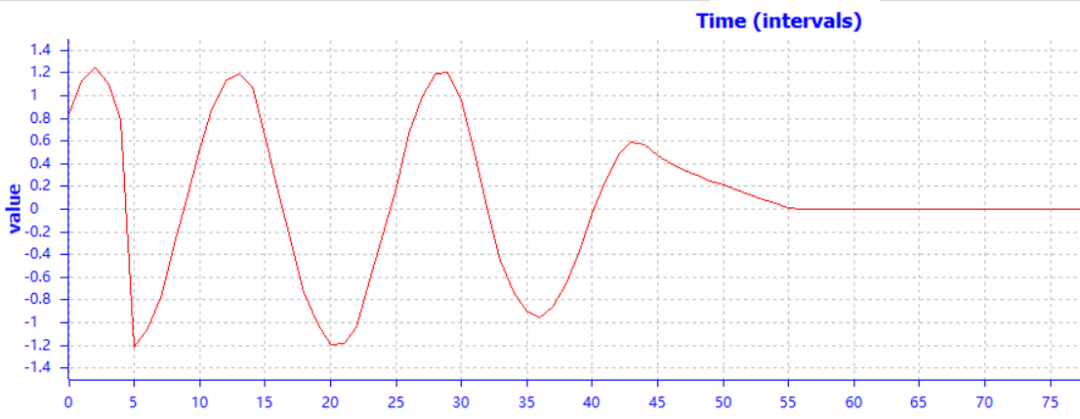
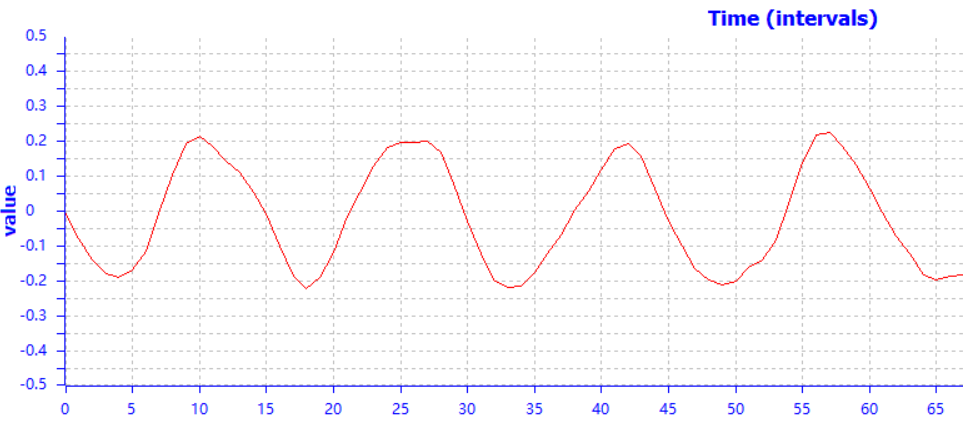
3.2 电机运转时电流测试
1
空载60rpm转速启动时的V相电流:启动电流约1.2A
2
空载60rpm,匀速运转时的V相电流:约0.1A
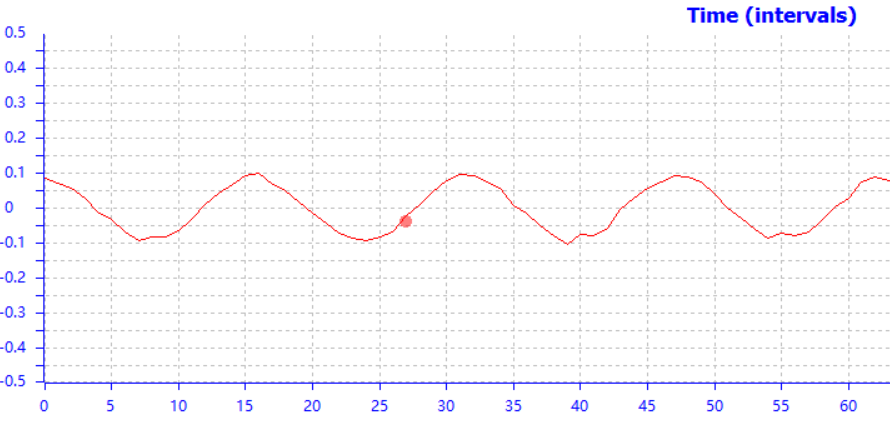
3
60rpm,加了轻载,匀速运转时的V相电流:约0.2A
4. 规范
下列表格中列出了评估板的电气规范和其他规范。
4.1 电气规范
表1 输入电源规范

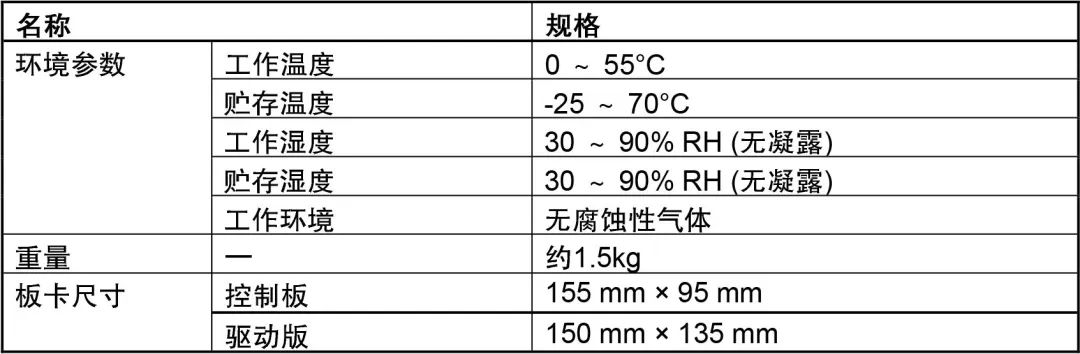
4.2 环境参数
表2 环境规范
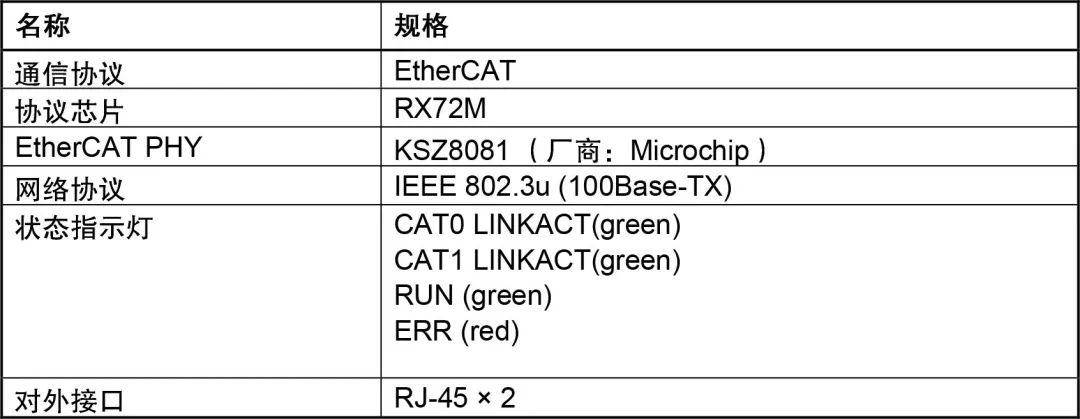
4.3 规范
表3 通信规范
更多内容您可点击文末阅读原文和识别下方二维码查看:
1
END
1
-
mcu
+关注
关注
147文章
19128浏览量
403901 -
瑞萨
+关注
关注
38文章
22518浏览量
91191
发布评论请先 登录
EtherCAT应用示例,GOAL 应用说明
Freescale K20P100M72SF1芯片:特性、参数与设计要点解析
Renesas RX72T Group MCU:高性能与多功能的完美结合
Renesas RX72M Group MCU:高性能与多功能的完美融合
深入剖析RX64M/RX71M组闪存内存:特性、配置与操作指南
EtherCAT转Profinet网关与一体式伺服EtherCAT通讯系统配置要点

Renesas RX64M/RX71M 系列闪存内存硬件接口深度解析
伺服驱动互联密码:Profinet转EtherCAT网关配置案例

深入解析RX64M/RX71M组闪存内存:特性、操作与安全保障
DR1M90 开源 IgH EtherCAT 主站案例:伺服电机正反转实时控制方案
Renesas Starter Kit for RX72T:开启嵌入式开发新征程
恩智浦MCU方案 单颗i.MX RT1180实现EtherCAT+伺服控制
EtherCAT主站转Profinet网关连接汇川伺服系统的操作模式控制技术方案

基于EtherCAT转Profinet网关接汇川伺服系统操作模式控制技术方案

瑞萨FUSA参考板使用指南(RX72N-RX72N参考板)符合SIL3标准的功能安全平台软件PLSW软件使用教程



评论