 主动适应国家需求提升机器人研发创新效能
主动适应国家需求提升机器人研发创新效能

在新型举国体制下,肩负着实现高水平科技自立自强使命的中科院下属研究所应该充分发挥体系化、建制化优势,面向国家重大战略需求,集中力量开展重大科技攻关。
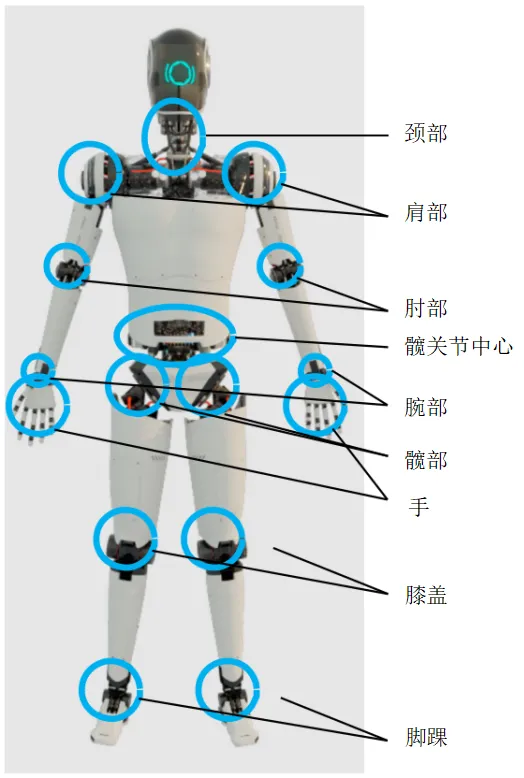
机器人是中科院沈阳自动化研究所(以下简称沈阳自动化所)三大学科方向之一,有多个研发单元致力于面向不同应用场景开展机器人理论研究与装备研发。40余年来,沈阳自动化所在中国机器人事业发展历史上创造了数十项第一,研发的海洋机器人、空间机器人、特种机器人、医疗康复机器人、微纳机器人等在满足国家重大战略需求、服务国民经济建设等方面发挥了重要作用。
机器人的研究离不开重大工程项目的开展。实践中,我们越发深刻地认识到,基础研究和工程技术应用不是单纯的上下游关系,而是高度共生、相互促进的。使命驱动的机器人研究早已不是简单的线性模式,而是多学科交叉融合、全链条协同发力的过程。对于高技术类研究所来说,需重点提升两个能力:一是在重大工程项目中提出并解决科学问题,注重向创新链前端延伸,不断提升自身基础研究能力,为工程技术的可持续发展提供源头活水;二是瞄准国家重大需求找准位置形成系统性解决方案,借势发力,提升满足国家重大战略需求的能力,展现研究所身为国家队、肩扛国家责的使命担当。
在机器人化微纳量测和操控研究方面,沈阳自动化所以纳米量测技术为基础,在《自然-通讯》、《科学进展》、IEEE Trans等国际学术期刊和会议上发表论文150余篇,成果入选“2020中国智能制造十大科技进展”。在半导体领域高端装备受到国外制约后,科研团队瞄准半导体制造工艺对高端纳米测量与操控装备的需求,研发了面向半导体产线的高端纳米精测设备,已经投入产线应用,助力高良率芯片生产。科研团队在设备研发过程中形成的压膜阻尼纳米位移传感、宏微纳跨尺度测量等核心技术,支撑了研究所多项目前在研的国家自然科学基金项目,对于解决重大基础科学问题起到了重要作用。
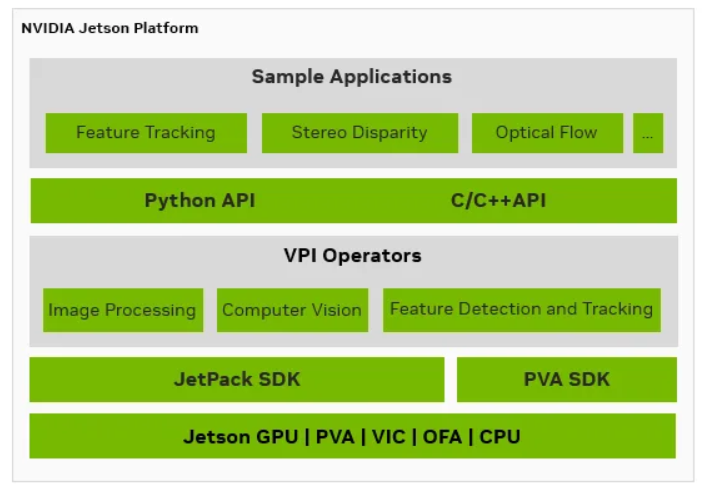
在机器人视觉技术方面,沈阳自动化所相关科研团队近年来在国家重大工程的牵引下,从国家重大研制任务实际需求出发,凝练重要科学问题,攻克了极端视觉条件下的图像恢复难题,形成了全天候机器人视觉理论和技术体系,研制了具有复杂光照及恶劣天气抵抗能力的全天候多模态视觉系统,支撑了我国机器人在应急救援、极地科考和深海探测等领域的一批重大应用, 提升了机器人在废墟内部光照剧烈变化、南极白化天气或水下强散射等极端视觉条件下的环境感知和作业能力。
此外,沈阳自动化所注重发挥协同创新作用,依托机器人学国家重点实验室,分别与中科院大连化学物理研究所催化基础国家重点实验室、中科院上海有机化学研究所金属有机化学国家重点实验室、厦门大学近海海洋科学国家重点实验室建立合作伙伴关系,在机器人与催化科学、有机化学和海洋保护等方向开展协同攻关,进一步发挥机器人的使能推动作用。
2022年,沈阳自动化所积极推进国家重点实验室重组,以此为契机,重组创新要素,围绕制造强国、海洋强国、航天强国和健康中国等国家需求,凝聚研究方向。在研究范式方面,研究所更加注重需求牵引的多学科交叉、场景驱动的基础研究和工程开发,适应交叉融合、数据驱动、科研智能化的趋势。在新的运行机制下,研究所将进一步强化与国内龙头企业、重大需求部门和用户联盟的联动。
通过主动拥抱机器人研究新范式,让沈阳自动化所发展更加聚焦、创新效能获得更大发挥,从而更加充分发挥国家战略科技力量主力军作用!
(作者系中科院沈阳自动化研究所副所长)
审核编辑 :李倩
-
半导体
+关注
关注
339文章
31236浏览量
266521 -
机器人
+关注
关注
213文章
31439浏览量
223636 -
机器人视觉
+关注
关注
0文章
57浏览量
10624
原文标题:中科院沈阳自动化所副所长刘连庆:主动适应国家需求提升机器人研发创新效能
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
Neway电机方案在机器人技术方面的优势
TCXO晶振:YXC扬兴科技 | 助力机器人运动控制提升方案

如何在NVIDIA Jetson Thor上提升机器人感知效率
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
深度解读人形机器人电感产品需求及应用选型技巧
如何借助OpenUSD提升机器人开发流程效率
机器人看点:宇树新专利可提升机器人表演效果 蔚来资本入股具身智能公司原力灵机 美信科技新设机器人制
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人线束揭秘 | 性能加持助力机器人作业效率稳定跃升

工业机器人的特点
工业机器人与协作机器人概念不同

盘点#机器人开发平台
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
借助NVIDIA技术提升机器人的移动和全身控制能力




评论