 Arduino蓝牙手套第一部分—基础
Arduino蓝牙手套第一部分—基础

这篇文章来源于DevicePlus.com英语网站的翻译稿。
本项目的目的是开发一种能够检测出操作员的手和手指方位的设备,以实现机器人的控制。我们将介绍有关电阻和分压器的基础知识。另外,我们还将了解如何通过 I2C 总线从陀螺仪和加速度计获取测量值,以及如何建立 Arduino–PC蓝牙连接。该设备在集成到 Arduino蓝牙手套中之后将会发挥出它的作用。
硬件
• Arduino UNO
• 面包板
• 电位计 0-10kOhm
• 电阻 10 kOhm
• IMU 传感器
• 电线
• Arduino 无线扩展板
• Xbee USB 适配器
• Bluetooth Bee
• PC 蓝牙适配器
• USB A-B 数据线
• 微型 USB 数据线
软件
• Arduino IDE 1.6.7
• LabVIEW
工具
• 万用表
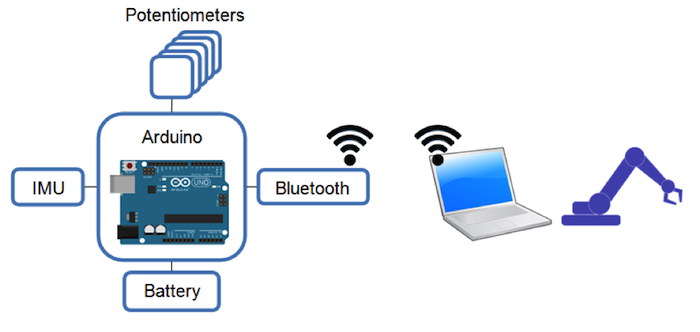
图1: Arduino蓝牙手套项目的基本示意图
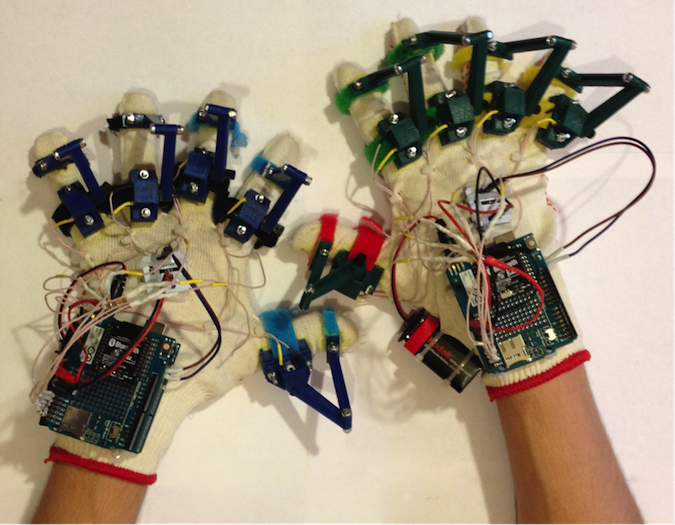
基于Arduino的采集系统配置在用户的每只手上。Arduino开发板通过测量每个电位计的电阻来获取手指弯曲(手指弯折)的信息。在处理了来自惯性测量单元(IMU)的数据后,可以识别出用户手的方位,该单元包括陀螺仪和加速度计。电池和无线数据传输模式使基于 Arduino的采集系统可用作一个可穿戴智能手套。例如,它可以用作手动控制机器人手臂的通用输入设备。
旋转测量
当旋转从手指传递到电位器手柄时,可以通过测量每个电位计的电阻来识别手指的弯曲。可使用分压器来测量电位计电阻。如果想要降低电压并获得某些固定值,可以在电路中使用分压器,由两个或多个电阻组成。
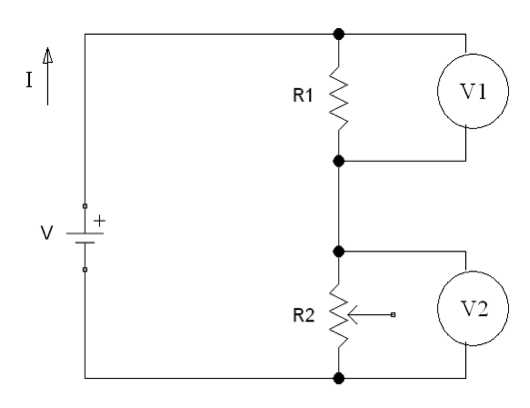
图2:分压器电路图
V 是来自Arduino 5V电源的电压; I 是 流经电路的电流; R1是具有固定电阻值的电阻; R2 是具有可变电阻的电位计; V1和V2是电压表。
电压在电阻R1和R2处均产生压降。V1和V2之和为V的值。根据欧姆定律:
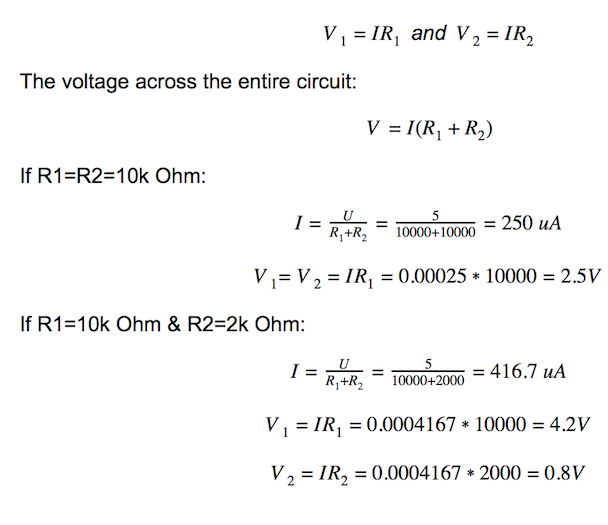
用Arduino模拟输入代替V2电压表,以测量电位计的电阻。
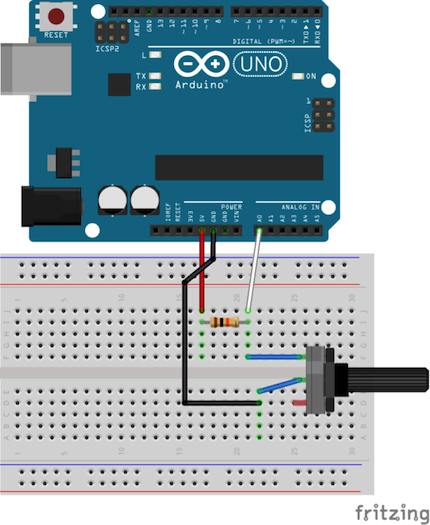
图3:分压器电路示意图
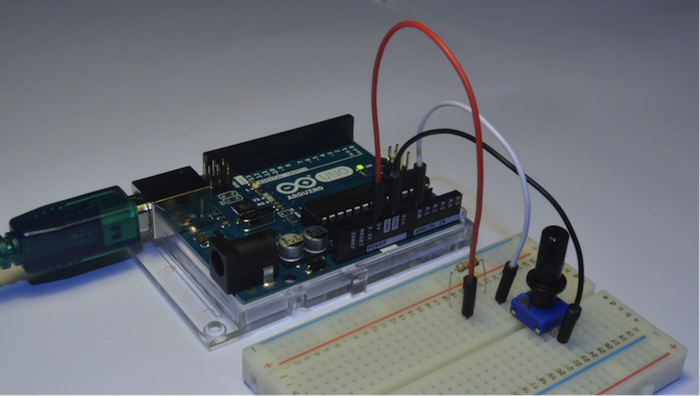
图4:安装在面包板上的分压器电路
int sensorValue;
void setup()
{
Serial.begin(9600);// initialize serial communication at 9600 bits per second
}
void loop()
{
sensorValue = analogRead(A0);// read the input on analog pin 0
Serial.println(sensorValue);// print out the value you read
delay(100); // delay in between reads for stability
}
定向测量
惯性测量单元(IMU)是一种可以测量人体比力和角速度的电子设备。通过对角速度的连续积分,我们可以获得安装有IMU传感器的物体的当前方向。
得益于MEMS技术,IMU传感器开始流行并被广泛使用。大多数MEMS IMU传感器利用 I2C协议作为将测量结果发送到控制器的主要方式。
您必须为芯片提供电源(V和G),并将数据和时钟引脚(D和C)连接到相应的数字引脚(SDA和SCL),如图5所示:
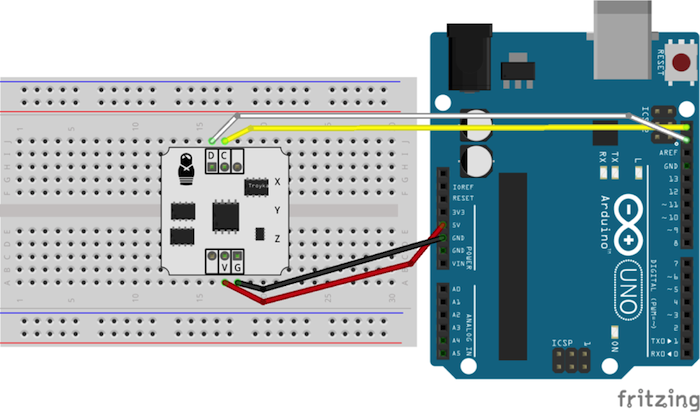
图5:IMU传感器连接
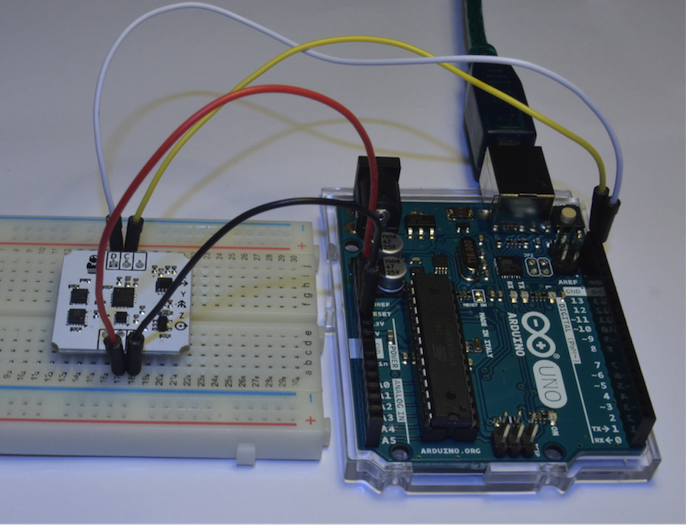
图6:连接到Arduino开发板的IMU传感器
通常,来自不同制造商的IMU传感器都会具有相同的结构,即所有的MEMS芯片都连接到 I2C 总线。因此,要从陀螺仪、加速度计和磁力计获取测量值,您将仅使用这两个引脚。
我们这里使用的IMU传感器包含 STMicroelectronics芯片( L3G4200D和 LIS331DLH )。如果您使用包含不同MEMS芯片的IMU传感器,可以更改源代码中的地址使其工作。
现在,让我们进行测试程序吧!
您需要下载安装 IMU 库 (点击Github上的“View Raw”来下载 IMU_Sensor.zip )。
将.ZIP Library 添加到 Arduino IDE( Sketch >> Include Library >> Add .ZIP Library…)
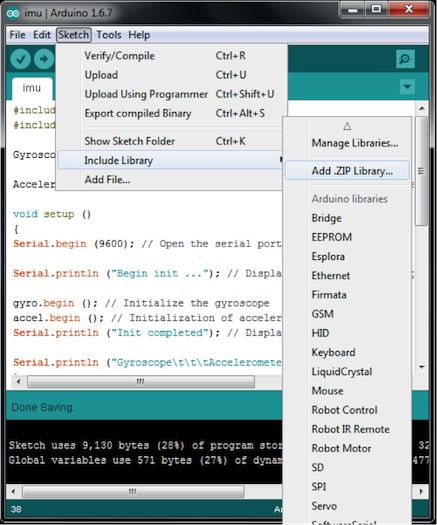
图7: Arduino IDE上添加.ZIP Library
您将会在 Arduino libraries文件夹中看到 IMU_Sensor库(图8)。现在,我们将使用“#include ”测试IMU传感器。
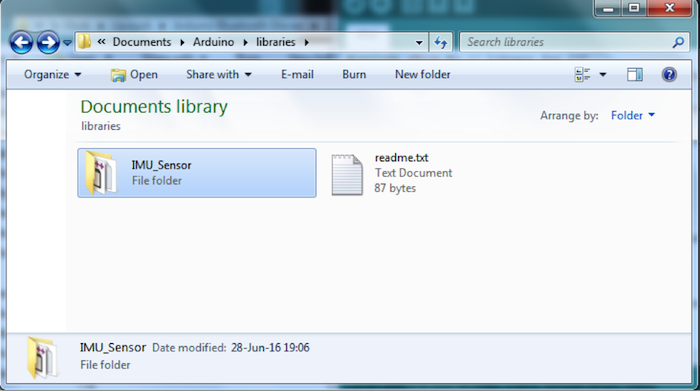
图8:Arduino libraries文件夹中出现的 IMU_Sensor库
#include // Library for I²C #include // Library for working with IMU modules Gyroscope gyro; // Create an object to work with Gyroscope Accelerometer accel; // Create an object to work with Accelerometer void setup () { Serial.begin (9600); // Open the serial port Serial.println ("Begin init ..."); // Display a message on the beginning of the initialization gyro.begin (); // Initialize the gyroscope accel.begin (); // Initialization of accelerometers Serial.println ("Init completed"); // Display a message about the successful initialization Serial.println ("GyroscopetttAccelerometer"); } void loop () { Serial.print (gyro.readX_DegPerSec ()); // Output angular velocity around the axis X Serial.print ("t"); Serial.print (gyro.readY_DegPerSec ()); // Output of the angular velocity around the Y axis Serial.print ("t"); Serial.print (gyro.readZ_DegPerSec ()); // Output of the angular velocity about the Z axis Serial.print ("tt"); Serial.print (accel.readX_G ()); // Output of the direction and magnitude of acceleration along the X axis Serial.print ("t"); Serial.print (accel.readY_G ()); // Output of the direction and magnitude of acceleration along the Y-axis Serial.print ("t"); Serial.print (accel.readZ_G ()); // Output of the direction and magnitude of acceleration along the Z axis Serial.print ("tt"); Serial.println (""); delay (300); }
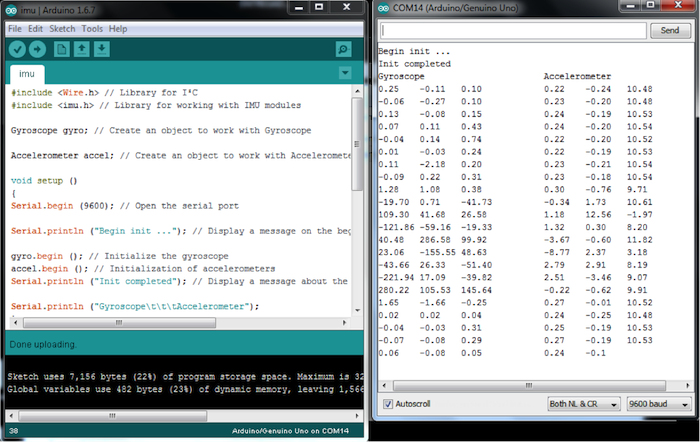
图9:IMU传感器输出
无线数据传输
可以使用 Bluetooth Bee(无线蓝牙BT模块)来建立无线连接。 Bluetooth Bee模块带有板载天线。它的作用就像一个透明串行端口,可与各种蓝牙适配器和蓝牙手机配合使用。
为了检查蓝牙模块配置,请将开关置于AT模式。当模块处于AT模式时,用户或主机微控制器可以通过经串行端口发送预定义的AT指令来对其进行配置。在AT模式下,您可以从BT模块获取服务数据并更改某些设置(名称,波特率,奇偶校验和停止位)。
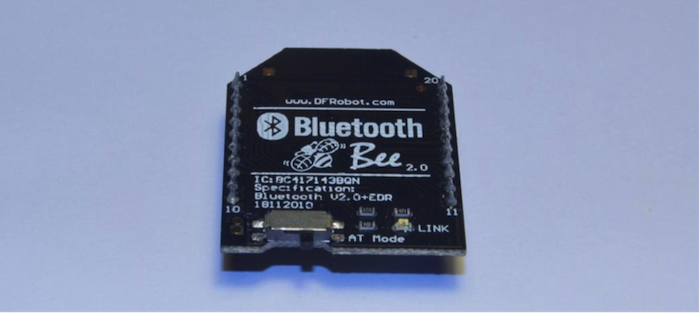
图10:开关置于AT模式的 Bluetooth Bee
将BT模块和 Xbee适配器堆叠在一起,然后通过微型USB电缆将 Xbee适配器连接到PC。LED灯必须处于打开状态。
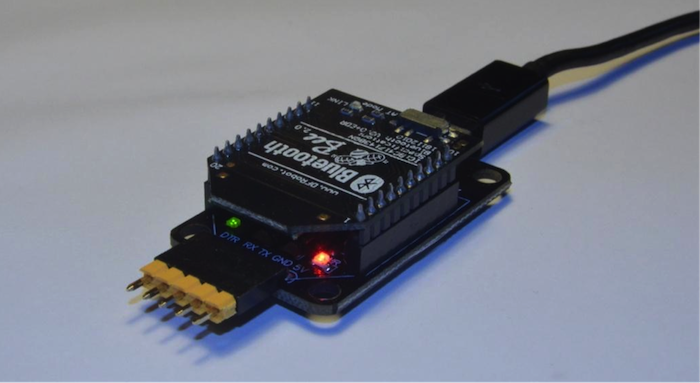
图11: Bluetooth Bee 放置于 Xbee适配器上
启动Arduino IDE,从 Tools >> Serial Port菜单中选择与 Xbee适配器对应的COM端口。
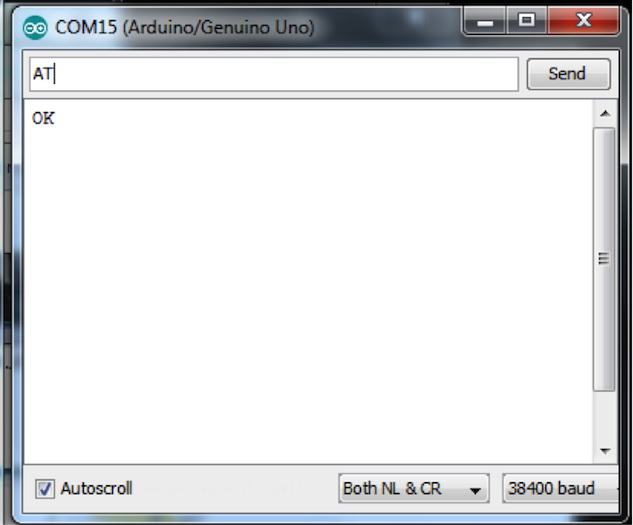
打开 Arduino的串行监视器( Tools >> Serial Monitor或者Ctrl+Shift+M )。如果COM端口没有正常显示,请安装 Xbee USB适配器驱动程序。从相应的选项栏中选择“Both NL & CR”、“38400”来更改PC的串行设置,以读取来自 Xbee适配器的信息,或写入需要输入到 Xbee 适配器中的信息。
发送“AT”并接收到“OK”。
发送“AT+UART?”并接收串行设置,如“9600,0,0”。
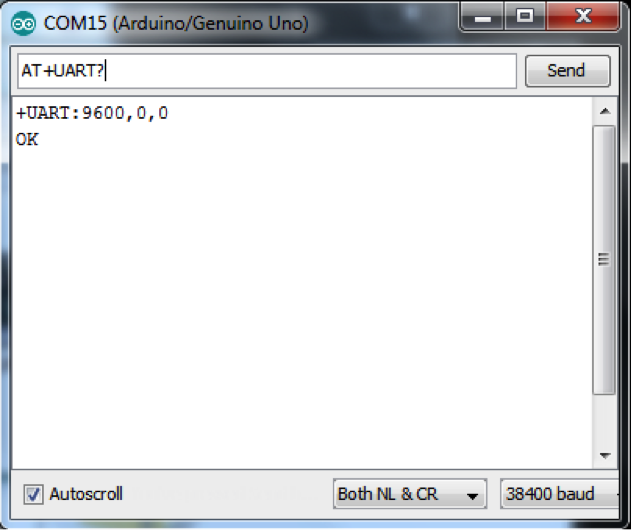
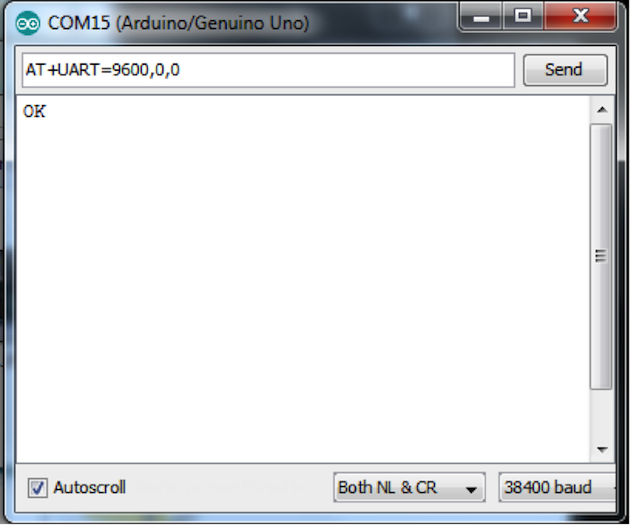
如果您接收到的串行设置不是“9600,0,0”,那么发送“AT+UART=9600,0,0”指令并接收到“OK”。
关闭串行监视器,断开 Xbee适配器与微型 USB数据线和BT模块的连接。不要忘记向左旋转开关来关闭AT模式。
将 Bluetooth Bee放置在 Arduino无线扩展板上,将 Arduino与USB A-B数据线连接,如图12所示。
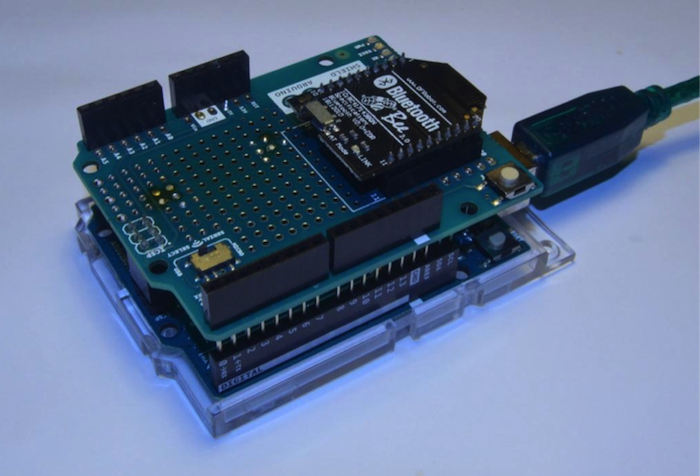
图12:在 Arduino无线扩展板上的 Bluetooth Bee
完成此步骤后,您将可以使用默认的“我的蓝牙设备”窗口找到您的 Bluetooth Bee。将您的 Bluetooth Bee与默认密码“1234”配对。请注意连接到您的设备的是哪个COM端口,在下一步草图中选择该COM端口。
这是用于测试蓝牙连接的 Arduino草图。(请注意,当将 Bluetooth Bee 安装到 Arduino无线扩展板上时,您将无法启用草图)。
#define LED 13
int pause = 0; // variable to store sent value
void setup()
{
pinMode(LED, OUTPUT);
Serial.begin(9600); // open the serial port
}
void loop()
{
if (Serial.available() > 0) {
// read incoming serial data:
String inStr = Serial.readString();
Serial.println("Get Message:"+inStr);
pause = inStr.toInt();
}
digitalWrite(LED, HIGH); // turn the LED on (HIGH is the voltage level)
delay(pause); // wait for a second
digitalWrite(LED, LOW); // turn the LED off by making the voltage LOW
delay(pause); // wait for a second
}
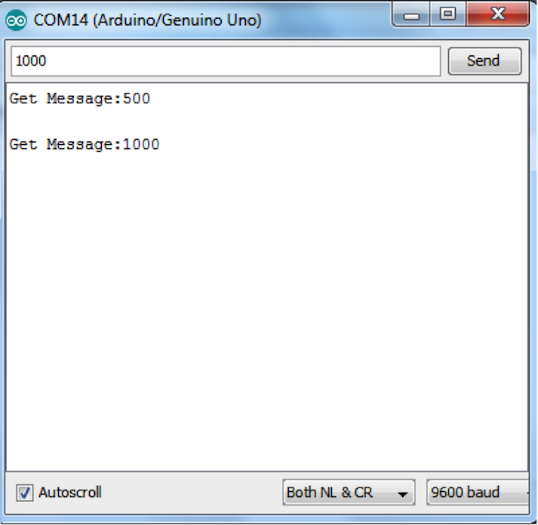
图13:测试 Bluetooth Bee连接
如果您有任何意见或疑问,请在 Google + 上给我们留言。请在该主页继续关注我们,我们将会尽快发布更多资讯。
审核编辑黄宇
-
蓝牙
+关注
关注
119文章
6221浏览量
177501 -
Arduino
+关注
关注
190文章
6514浏览量
195921
发布评论请先 登录
提高篇——C语言核心技术(中文版)
TI大学计划-电源篇
如何用 Raspberry Pi 500 搭建家庭录音室?
实用电子电路设计(全6本)—— 数字系统设计
LTC6563输入端采用AC耦合时,信号的一部分有效值会因饱和而截断怎么解决?
瑞为技术牵头制定的国家标准《信息技术 可扩展的生物特征识别数据交换格式 第1部分:框架》正式发布
python入门圣经-高清电子书(建议下载)
使用DLP9000在切换不同的灰度图时,会出现一部分的延迟以后才可以完整的显示图像,为什么?
DLPC3478固件加载只有前面一部分是怎么回事?
松下MPS媒体制作平台 第十一篇:深入探索自动跟踪插件(第二部分)

松下MPS媒体制作平台之自动跟踪插件(第一部分)

I2C接口的DAC8571输出不正常是什么原因?
视觉AI之旅:一起探索 FiftyOne ——第二部分 入门指南






 工商网监
工商网监
评论