 机器上常见的装配结构
机器上常见的装配结构

为保证机器或部件能顺利装配,并达到设计规定的性能要求,而且拆、装方便,必须使零件间的装配结构满足装配工艺要求。所以在设计绘制装配图时,应考虑合理的装配结构工艺问题。
一、接触面的数量
1. 接触面的数量两零件在同一方向上(横向、竖向或径向)只能有一对接触面,这样既能保证接触良好,又能降低加工要求,否则将造成加工困难,并且也不会同时接触。如图1所示,必须使a >a 。
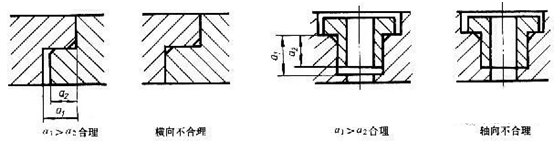
图1 接触面的画法
2.轴颈和孔的配合如图2,为保证金φA已经形成的配合,φB和φC就不应再形成配合关系,即必须保持φB>φC。
3.锥面的配合由于锥面配合能同时确定轴向和径向的位置,因此当锥孔不通时锥体顶部与锥孔底部之间必须留有间隙。如图2所示,必须保持L2>L1,否则得不到稳定的配合.圆锥的锥度与锥角的标准值。
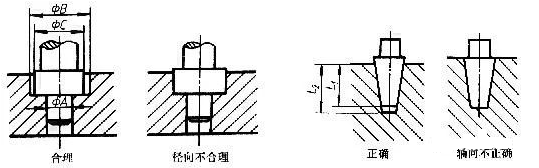
图2 轴颈与孔的配合及锥面的配合
4.转折处结构零件两个方向的接触面在转折处应做成倒角、倒圆或凹槽,以保证两个方向的接触面均接触良好。转折处不应都加工成直角或尺寸相同的圆角,因为这样会使装配时转折处发生干涉,以致接触不良而影响装配精度。如图3所示。
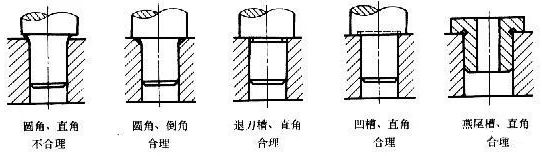
图3 接触面转折处的结构
二、螺纹连接的合理结构为了保证螺纹紧,应在螺纹尾部留出退刀槽或在螺孔端部加工出凹坑或倒角,如图4所示。为了保证连接件与被连接件间良好接触,被连接件上应成沉孔或凸台,如图4所示。被连接件通孔的直径应大于螺纹大径或螺杆直径,以便于装配。
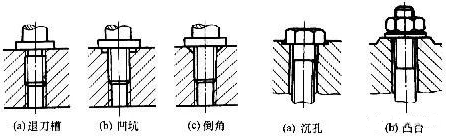
图4 利用螺纹旋紧的结构
三、滚动轴承轴向固定的合理结构为了防止滚动轴承产生轴向窜动,必须采用一定的结构来固定其同圈、座圈。常用的轴向固定结构形式有:轴肩、台肩、弹性挡圈、端正党风盖凸缘、圆螺母和止退垫圈、轴端挡 圈,如图5所示。孔和轴用弹性挡圈的标准尺寸,可从标准中查取。为了使滚动轴承转动灵活和热胀后不致卡住,应留有少量的轴向间隙(一般为0.2—0.3mm),常用的调整方法有:更换不同厚度的金属垫片或用螺钉止推盘等。(我们推荐你关注“机械工程师”公众号,第一时间掌握干货知识、行业信息)
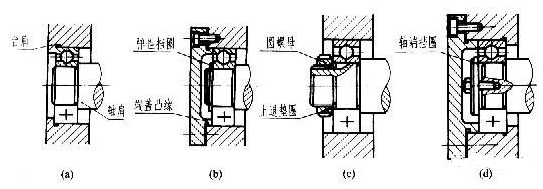
图5 滚动轴承圈的结构
四、防漏结构机器或部件能否正常运转,在很大程度上取决于密封或防漏结构的可靠性。为此,在机器或部件的旋转轴、滑动杆(阀杆、活塞杆等)伸出箱体(或阀体)处,常做成一填料箱( 涵),填入具有特殊性质的软质填料,用压盖或螺母将填料压紧,使填料以适当的压力贴在轴(杆)上,达到既不阻碍轴(杆)运动,又能阻止工作介质(流体或气体)沿轴(杆 )泄露,从而起到密封和防漏作用,如图6所示。画图时,压盖画在表示填料刚刚加满,开始紧填料的位置。
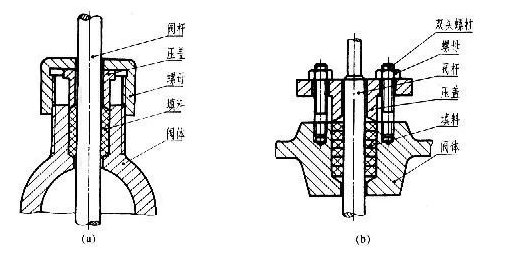
图6 防漏结构
审核编辑 :李倩
-
机器
+关注
关注
0文章
800浏览量
41938 -
结构工艺
+关注
关注
0文章
4浏览量
6022
原文标题:机器上常见的装配结构,看一看,是不是有些启发!
文章出处:【微信号:AMTBBS,微信公众号:世界先进制造技术论坛】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
驱动板与电机的装配美学:云台马达驱动板3D结构图与实物对照
智能装配如何与AR技术相结合
AR技术在装配中的应用
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
力传感器在工业自动化机器人中的应用:精确抓取/装配作业/搬运作业/柔顺控制

智慧物流新篇章:复合机器人重塑装配车间物料配送

SYSWELD焊接装配仿真流程介绍

锂离子电池的装配——电极卷绕和叠片

装配领域的智能工匠:富唯智能人形机器人引领精密制造新纪元
利用NVIDIA Isaac Lab训练工业机器人齿轮装配任务
重新定义精密制造!富唯智能高精度装配人形机器人引领智造革命

轮式移动机器人电机驱动系统的研究与开发
借助NVIDIA技术实现机器人装配和接触密集型操作



评论