 基于地理参考地标的外部感知定位系统减少地标可用的绝对误差
基于地理参考地标的外部感知定位系统减少地标可用的绝对误差

使用高清地图数据的高度自动驾驶系统的一个主要先决条件是了解车辆的位置。该位置需要具有比单独使用 GNSS 传感器所能达到的更高的精度。因此,可以使用陀螺仪或里程表等各种其他传感器系统来增强位置估计。本文描述了一个系统使用另一个输入ADASISv3地图数据来改进定位。地图数据从地图数据库接收,然后与来自摄像系统的交通标志测量值进行比较。
使用定位数据进行定位
EB 定位解决方案在其 EB robinos 定位产品中使用 LbL 数据。该定位产品获取所有可用的定位信息,例如GPS和车轮滴答声,并尝试将它们组合到最佳位置。此外,它试图通过相应的数学建模来降低每个传感器的单个噪声。结果是改进的全球位置和局部位置,表示为从驱动器开始累积的增量移动。
由于该测量的低频特性,LbL测量值作为连续定位的校正值集成到该整体定位系统中。每次将 LbL 定位(包括表示为方差的置信估计)转移到整体定位时,都会通过更新整体定位来计算和校正连续定位的误差。
蓝色标记表示ADASISv3数据提供的地标位置,红色标记表示LbL系统相对于车辆位置测量这些地标的位置。这些标记之间的偏移表明定位系统中已经存在累积的定位误差。系统本身估计它位于灰色汽车的位置,但绿色汽车显示将 LbL 测量的校正添加到整体定位后进行定位的位置。
实验结果
为了验证系统功能,EB的一辆测试车辆中安装了LbL系统。它在德国布伦瑞克附近的A391高速公路上进行了测试。在这些试驾期间,记录了来自高精度GPS系统的位置和来自LbL系统的位置。
安装的摄像系统是移动眼630型。它通过CAN总线提供交通标志测量。此外,定位系统使用车辆传感器来检测车辆主CAN总线上可用的车轮滴答声和陀螺仪。由于作者无法直接从主要地图提供商的数据库中获取交通标志信息(数据将在2019年晚些时候提供),因此参考数据是从航空图像中测量的。
定位输出系统两次测量之间的通常创新远低于0.5m。然而,在大约2.9秒时,创新上升到约2.5m。此时,交通标志摄像头的测量值被认为可以校正车辆的位置。如第 5 节中的场景所述,当车辆以大约 80 公里/小时的速度行驶时,车辆检测到两个交通标志,并将它们与地图数据库中的两个交通标志进行匹配。即使在不同的纵向位置检测到两个交通标志,如图 5 所示对齐。在本文冷静的时候,无法确定摄像头是否真的检测到不同位置的标志,或者公共汽车上的延迟是否导致了位置差异。
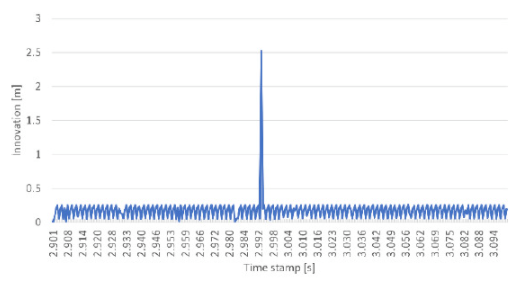
图7.创新定位系统,包含交通标志在2.992秒的校正。
在图8中,绘制了LbL测量对单个位置变量的影响。蓝线表示纯粹基于内感受传感器的定位系统的位置。GPS噪声的影响可以从这条线的抖动中看出。LbL 系统以橙色表示。一旦 LbL 在大约 6s 处测量位置,它对整体位置的影响就可见,因为可以观察到蓝线的修正。
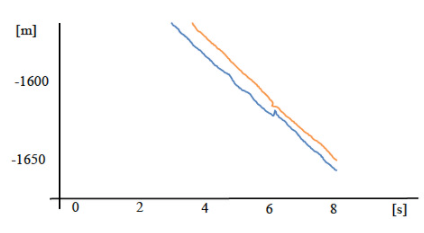
图8.LbL 测量在大约 6 秒时的影响。
绿色车厢表示在没有 LbL 校正的情况下定位自身定位的位置。红色汽车显示了 LbL 本地化发生的地方。灰色汽车表示汽车在应用基于 LbL 的位置校正后定位自己的位置。
结论
基于地理参考地标的外部感知定位系统可以减少这些地标可用的绝对误差。通过这一贡献,作者展示了如何使用通过ADASISv3提供的数据实现此类系统的概念证明。此外,它还描述了此时系统如何直接使用高清地图数据库。交通标志的参考数据很可能很快就会可用,手动获取的交通标志位置可能会被替换。
该贡献概述了LbL系统的处理链。然后将该系统与真实世界的数据一起使用,并显示测量数据的影响。
使用地标进行定位可以在GPS不可用且内感受传感器将产生漂移的情况下改进位置软件组件。
这一概念验证的开发将在EB罗比诺斯定位产品中继续进行。目前,EB 提供功能齐全的定位软件组件,用于基于车轮滴答声、加速度计和其他内感受传感器的汽车级定位,以及用于全球定位的 GPS。该产品的下一代还将包括基于地标的定位以及基于SLAM的点云(例如来自LIDAR或相机)。
审核编辑:郭婷
-
传感器
+关注
关注
2577文章
55498浏览量
793888 -
gps
+关注
关注
22文章
3044浏览量
173952
发布评论请先 登录
北斗卫星导航定位技术从核心误差修正方法、不同定位模式到工业场景融合应用详解(二)

高精度绝对式编码器:工业自动化的“智慧之眼”

开源鸿蒙技术大会2025丨定位与感知分论坛:构建开源鸿蒙全场景定位感知用户体验

如何验证电网关键节点的电能质量监测装置的现场接地系统是否符合单点接地标准?
欧菲光与广和通联合首发ToF+双目感知定位模块

如何减少外部环境对电压暂降的影响?

中软国际助力启德体育园打造智慧场馆新范式
测量误差溯源:系统误差与随机误差的数学建模与分离方法
绝对值空心轴编码器:工业自动化领域的“定位智脑”
多摩川17位绝对式编码器实现伺服系统纳米级定位精度

绝对值编码器故障溯源:精准定位背后的隐秘挑战

绝对位置感知的机器人多关节模组高精度运动学解算与动态误差补偿



评论