 下方进行ABB机器人IRB1200转数计数器操作方法
下方进行ABB机器人IRB1200转数计数器操作方法

在以下情况需要对机械原点位置进行转数计数器更新操作:
1.更换伺服电机转数计数器电池后。
2.当转数计数器发生故障,修复后。
3.转数计数器与测量板之间断开过以后
4.断电后,机器人关节轴发生了位移。
5.当系统报警提示“10036转数计数器未更新”时。
下方进行ABB机器人IRB1200转数计数器操作方法
01
key:使用手动操纵让机器人各关节轴运动到机械原点刻度位置的顺序是:4—5—6—1—2—3。
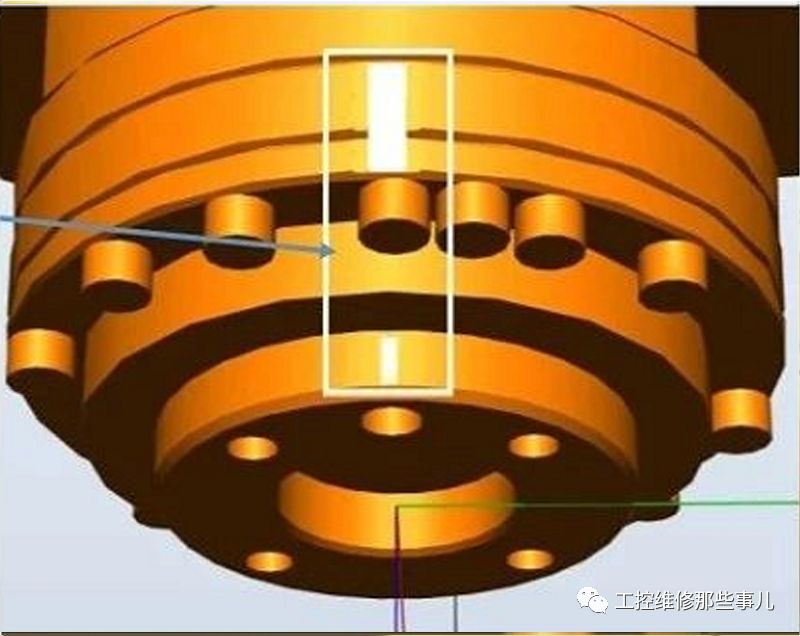
机器人六个关节轴的机械原点刻度位置如下图所示。

02
在手动操纵菜单中,动作模式选择“轴4-6”,将关节轴4运动到机械原点的刻度位置(下图箭头所示)。

03
在手动操纵菜单中,动作模式选择“轴4-6”,将关节轴5运动到机械原点的刻度位置(下图箭头所示)。

04
在手动操纵菜单中,动作模式选择“轴4-6”,将关节轴6运动到机械原点的刻度位置(下图箭头所示)。
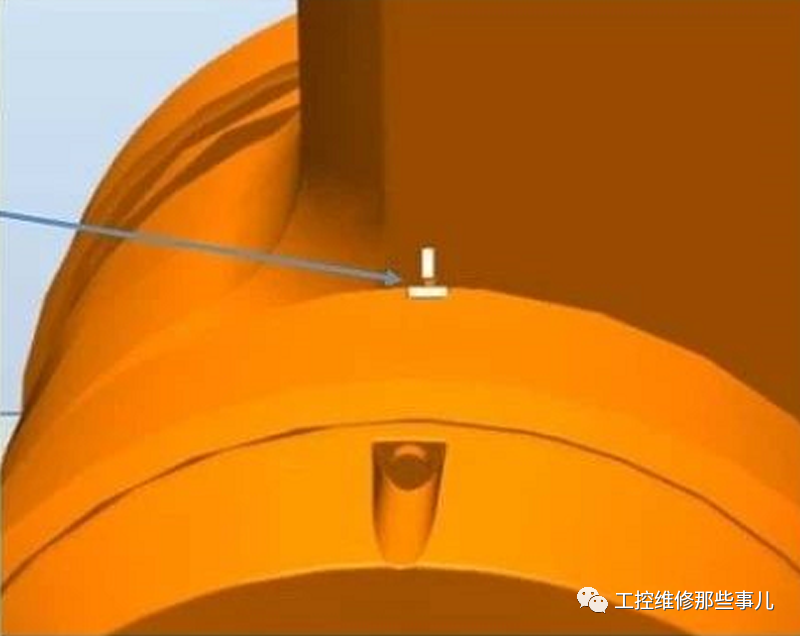
05
在手动操纵菜单中,动作模式选择“轴4-6”,将关节轴1运动到机械原点的刻度位置(下图箭头所示)。

06
在手动操纵菜单中,动作模式选择“轴4-6”,将关节轴2运动到机械原点的刻度位置(下图箭头所示)。
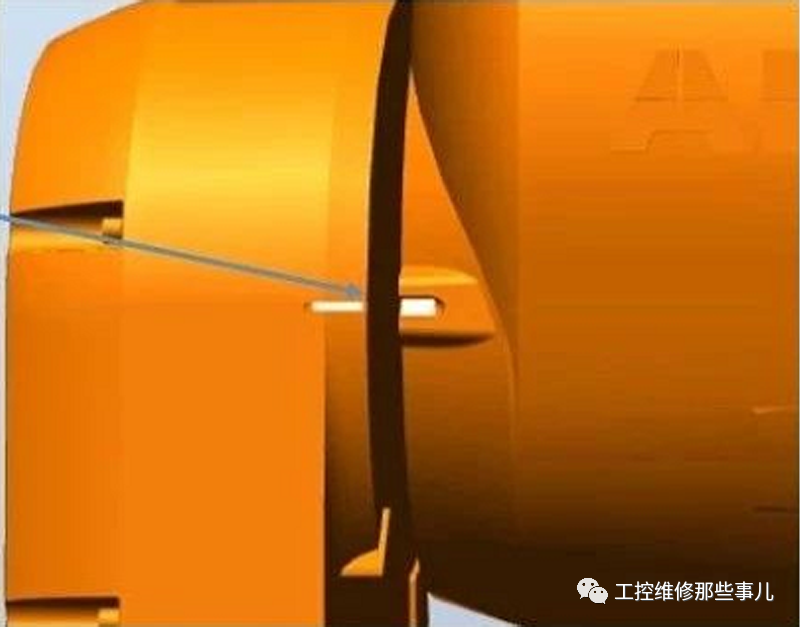
07
在手动操纵菜单中,动作模式选择“轴4-6”,将关节轴3运动到机械原点的刻度位置(下图箭头所示)。
08
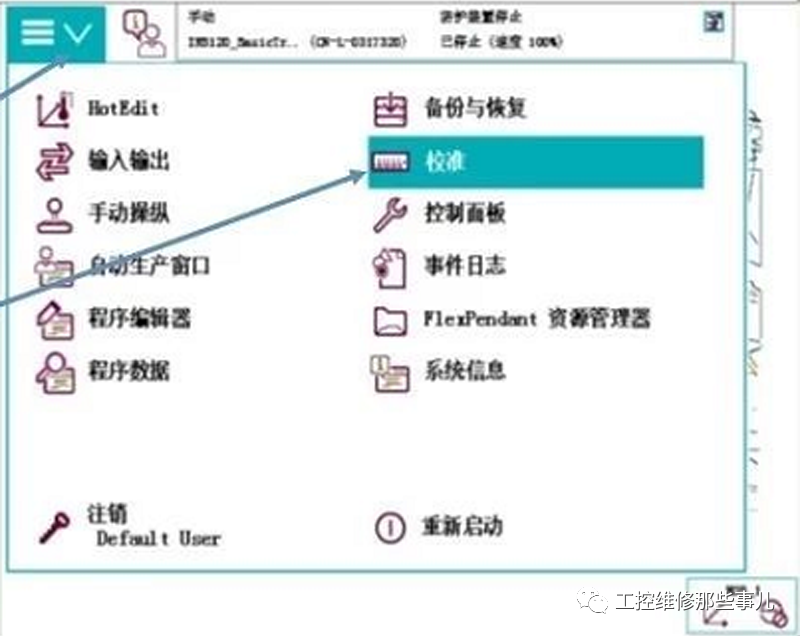
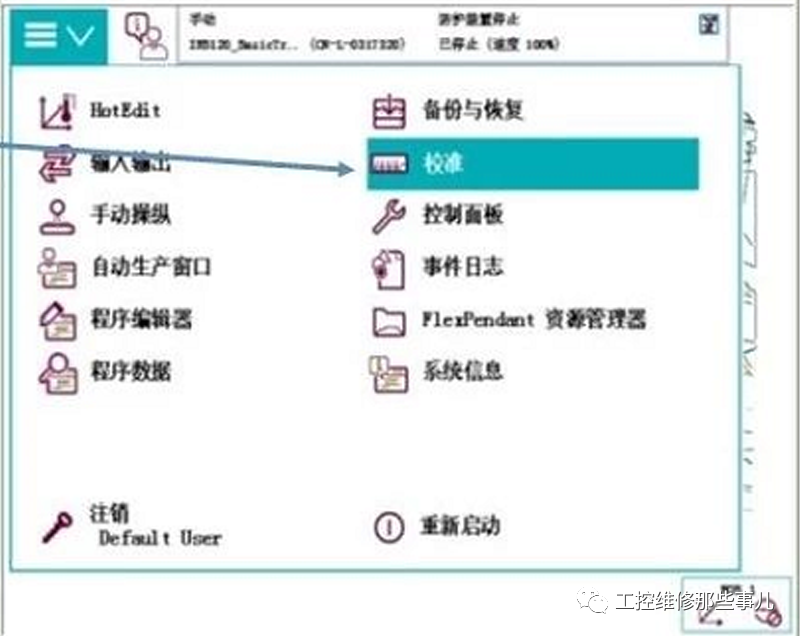
先点击左上角的主菜单
然后选择“校准”。
09
点击“POB_01”

10
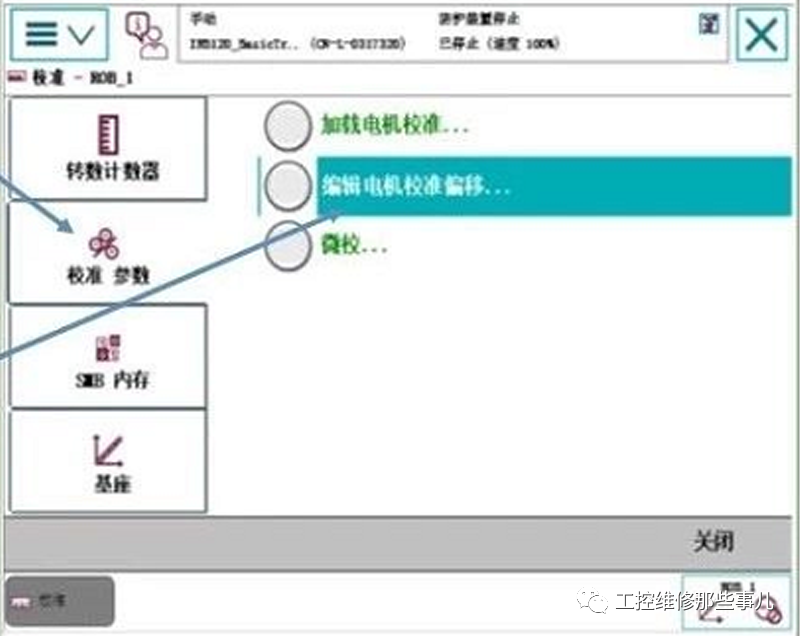
先选择“校准参数”。
再选择“编辑点击校准偏移”。
11
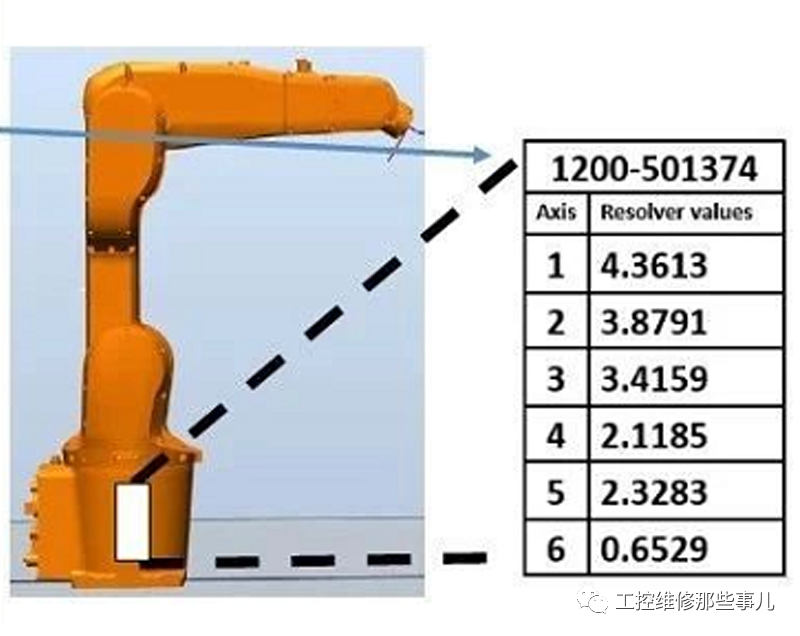
将机器人本体上电机校准偏移记录下来,后面会用到。
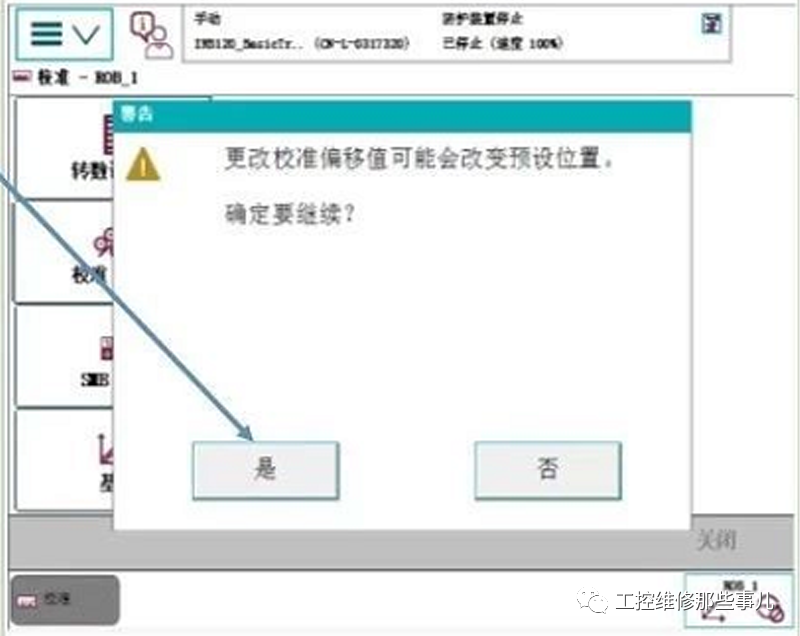
12
点击“是”
13
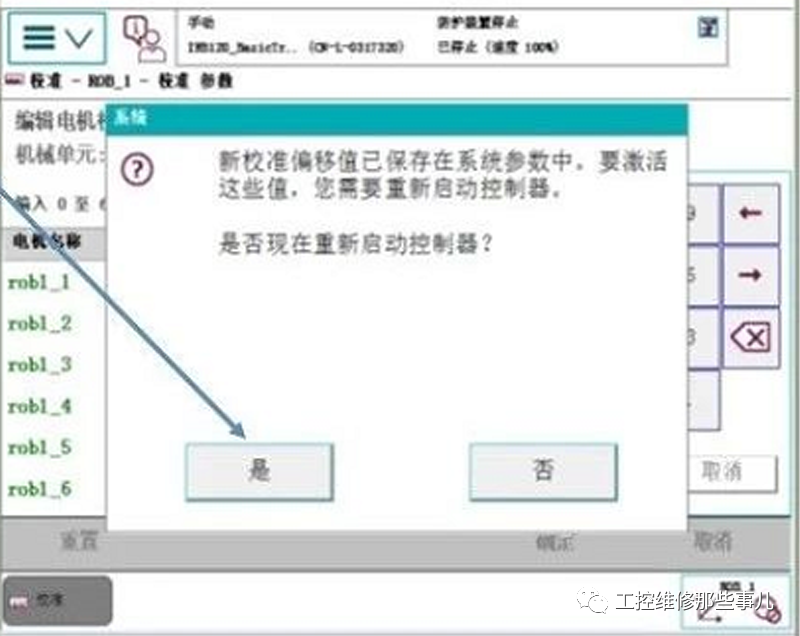
输入刚才从机器人本体记录的电机校准偏移数据,然后点击“确定”。
如果示教器中显示的数值与本体上的标签数值相同,则不需修改,直接点击“取消”退出,跳到第17步。

14
点击“是”
15
重新启动控制器后,点击“校准”。
16
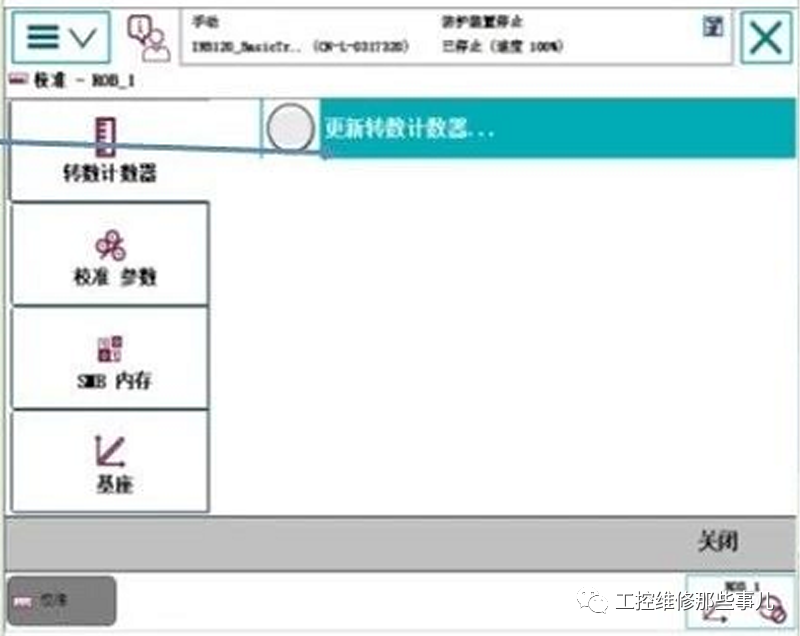
点击“ROB_1”

17
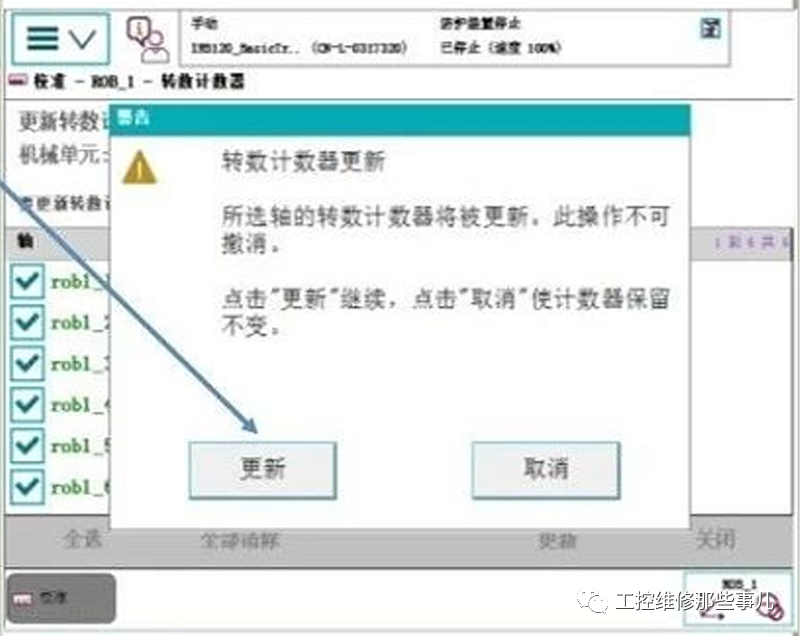
点击“更新转数计数器”。
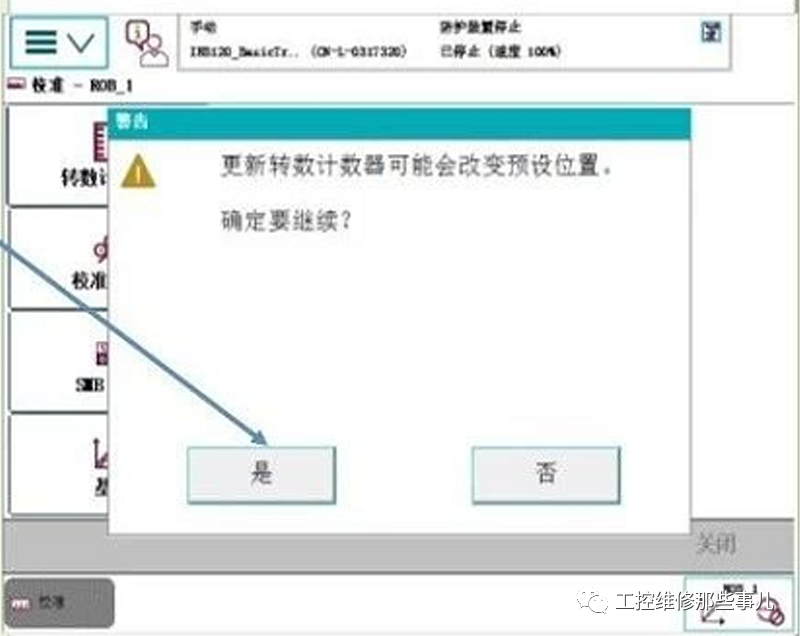
18
点击“是”
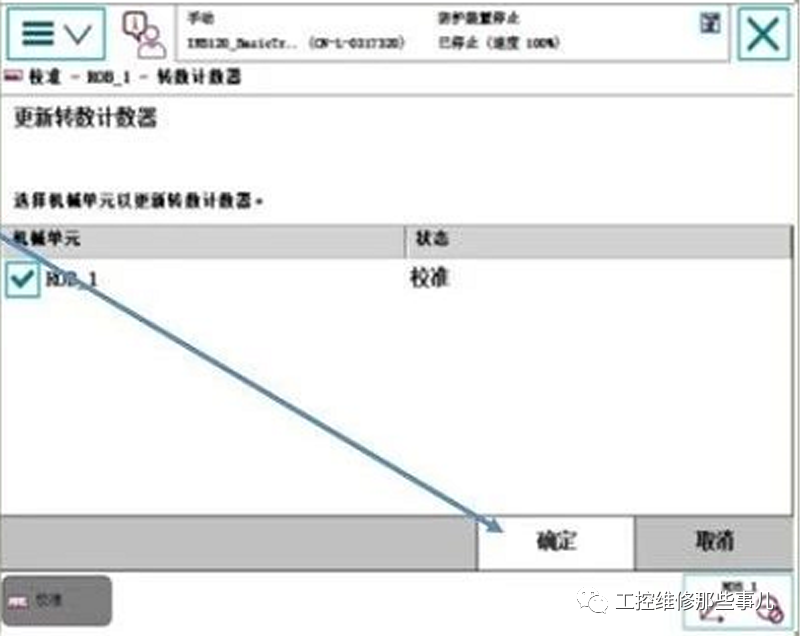
19
点击“确认”。
20
key:如果机器人由于安装位置的关系,无法六个轴同时到达机械原点刻度位置,则可以逐个对关节轴进行转数计数器更新。
点击“全选”,然后点击“更新”。

21
点击“跟新”。
审核编辑 :李倩
-
机器人
+关注
关注
214文章
31602浏览量
224277 -
机械
+关注
关注
8文章
1773浏览量
44053 -
计数器
+关注
关注
32文章
2324浏览量
98689
原文标题:下方进行ABB机器人IRB1200转数计数器操作方法
文章出处:【微信号:pcb_repaired,微信公众号:工控维修那些事儿】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
白车身焊接线西门子 S7-1200 与 ABB 机器人工业自动化解决方案

为什么说关节扭矩传感器是高端机器人的“触觉神经”?
极速组态!Profinet转Ethernet网关让ABB机器人主站秒连工业网络(上集)
ProfiNet转EtherCAT工业数据采集网关实现禾川PLC与ABB机器人通讯的配置案例
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
突发!ABB机器人业务易主,软银53.75亿美元接盘
开疆智能Profinet转ModbusTCP网关连接艾力特机器人配置案例
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
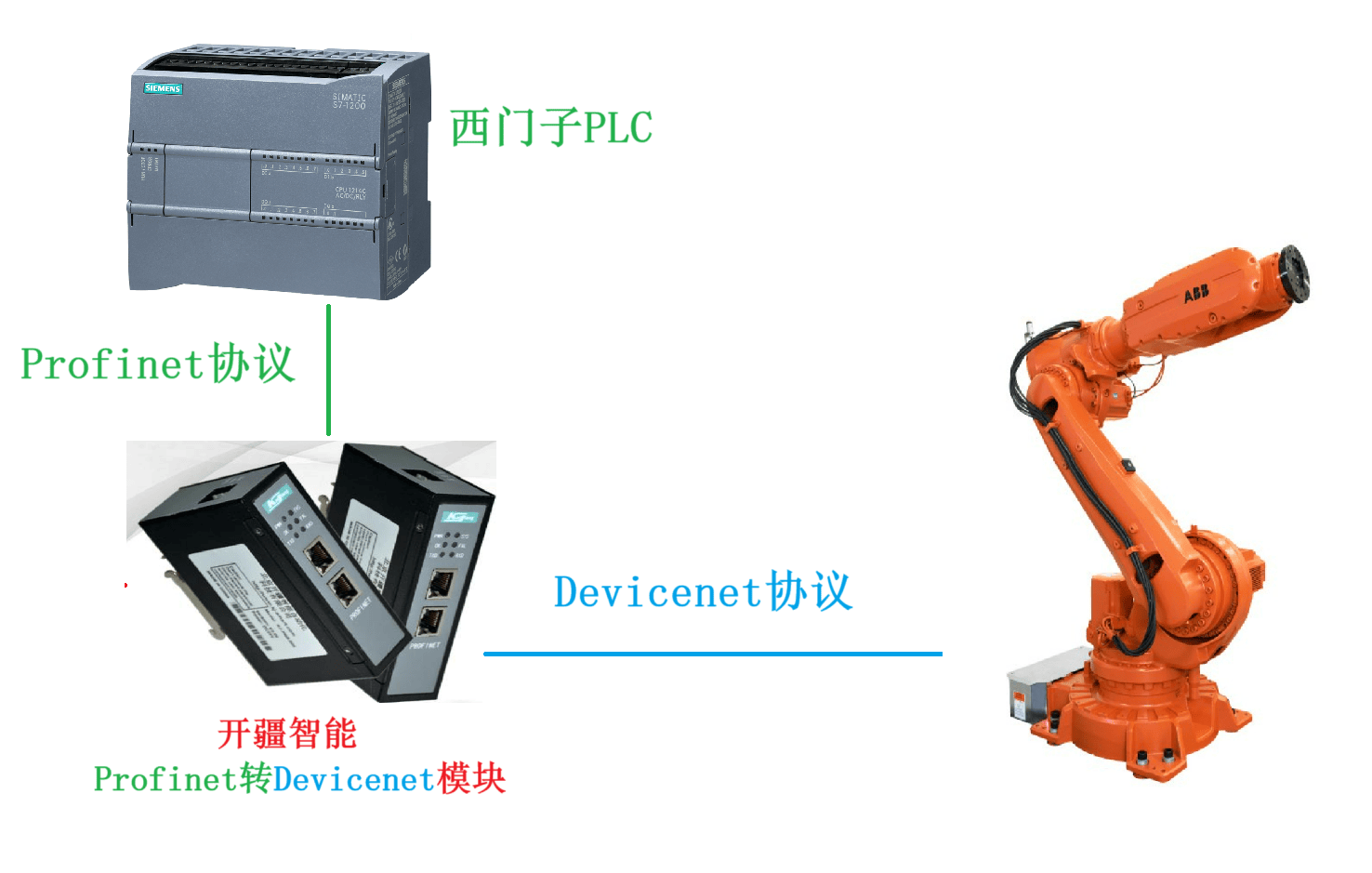
开疆智能Profinet转Devicenet网关连接ABB机器人配置案例
开疆智能ModbusTCP转Devicenet网关连接FANUC机器人配置案例

开疆智能ModbusTCP转Devicenet网关连接三菱PLC与ABB机器人配置案例

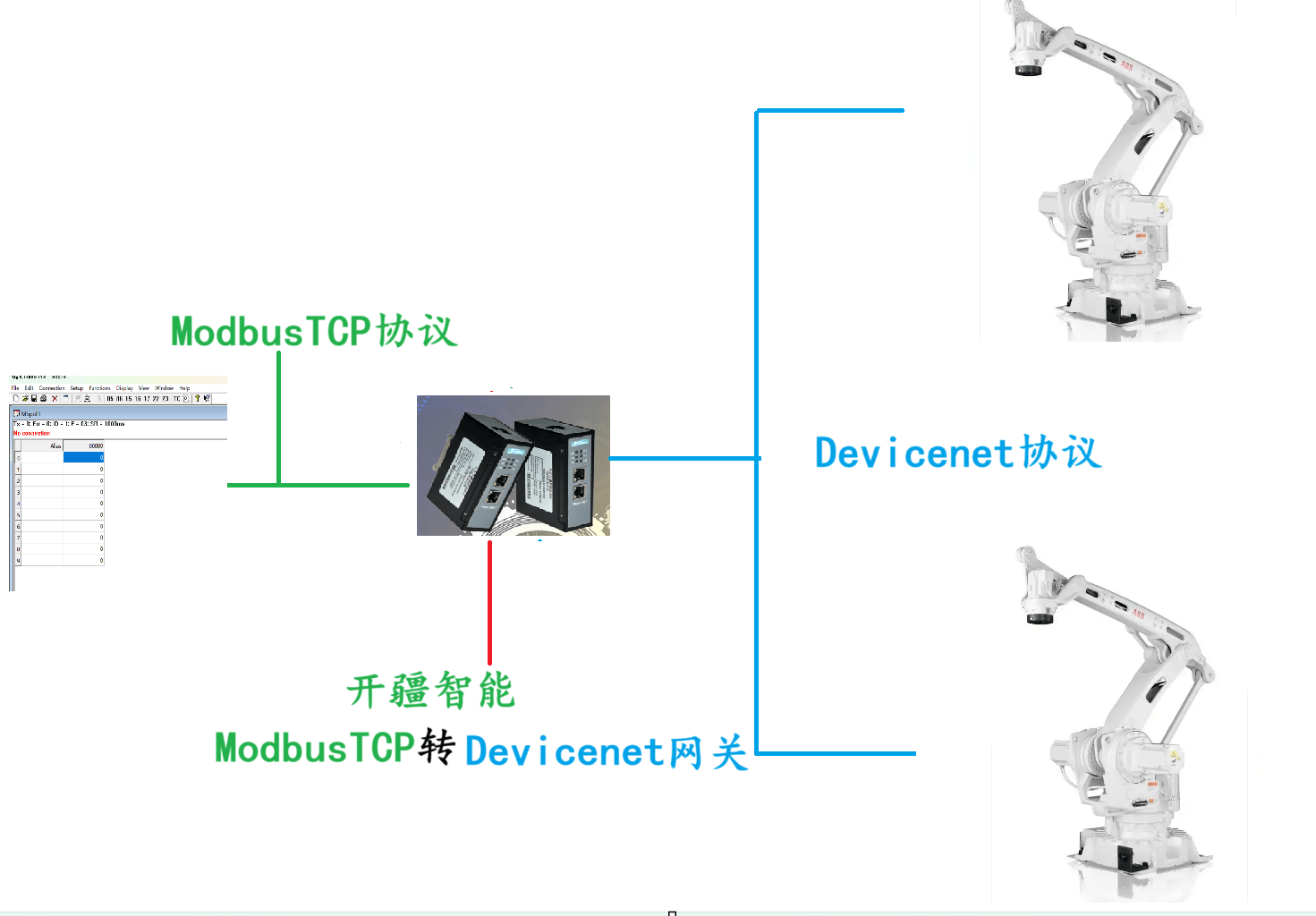
开疆智能ModbusTCP转Devicenet网关连接ABB机器人配置案例
开疆智能Profient转ModbusTCP网关连接ABB机器人MODBUS TCP通讯案例




评论