 应用于人工智能和机器视觉的微型高速图像传感器RV400
应用于人工智能和机器视觉的微型高速图像传感器RV400

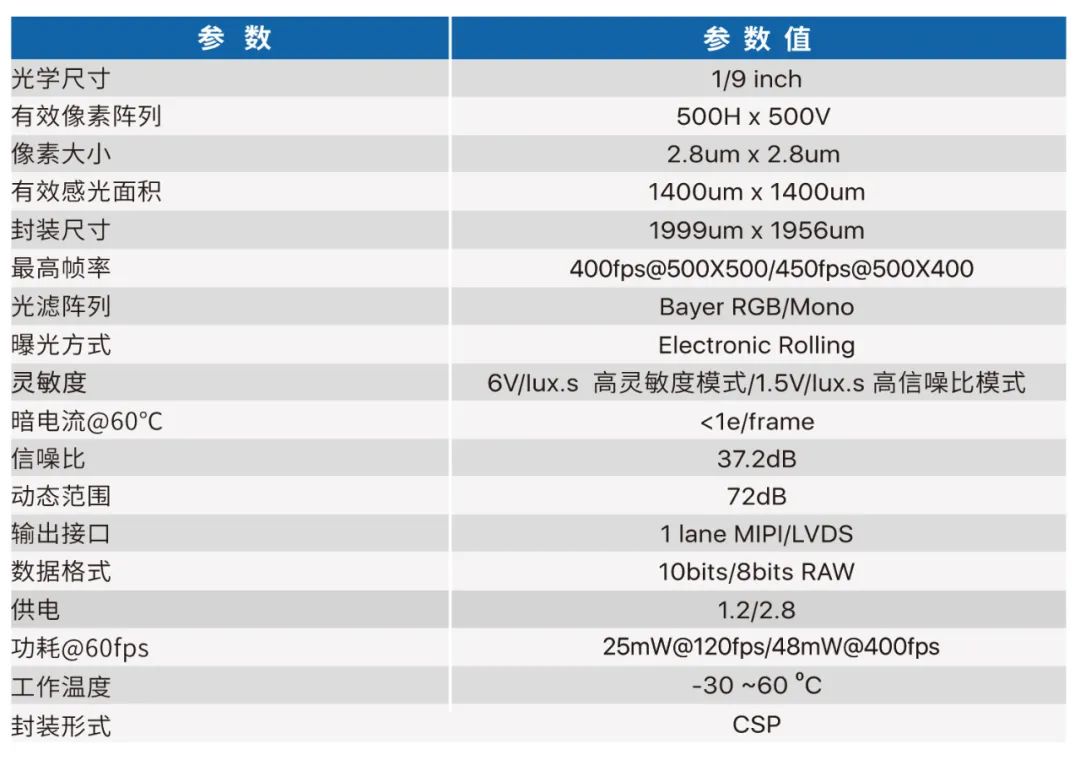
锐芯微电子近日发布应用于人工智能和机器视觉的微型高速图像传感器RV400。RV400高速低功耗图像传感器靶面尺寸为1/9英寸,分辨率为500H*500V,采用2.8um BSI高灵敏度近红外增强像素设计,RV400 120fps帧率运行时仅25mW功耗,400fps帧率运行仅48mW,与此同时其封装尺寸仅2mmx2mm,与同类型传感器相比,RV400感光面面积增大23%,芯片面积缩小67%,400fps工作时芯片功耗降低65%。

RV400兼容LVDS/MIPI 10bit/8bit图像输出模式,灵活的图像数据接口可满足更多方案需求。
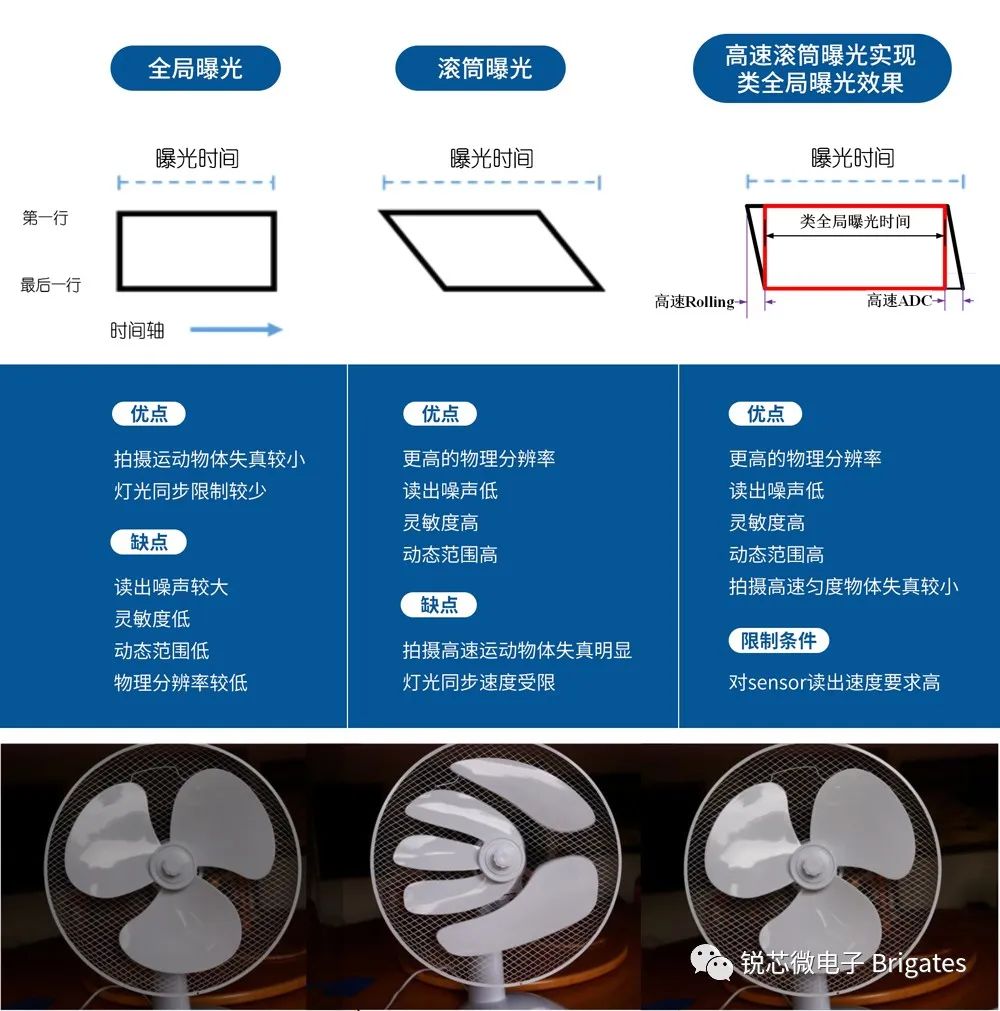
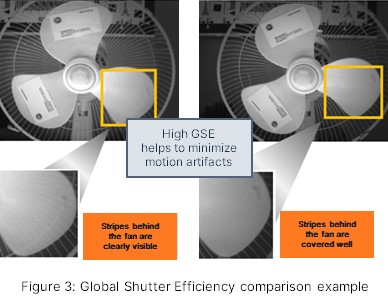
RV400采用创新架构设计支持低功耗、图像采集,最高可支持全分辨率400fps高速成像,超高帧率可实现类全局曝光效果。这一特性使得RV400可取代部分全局曝光传感器,应用于机器视觉,无人机,物联网等领域。而高灵敏度和近红外增强的特性可进一步降低系统对于光源的要求,适用更多场景。
微型2mm裸芯尺寸使其可用于空间有限的便携设备,如监控佩带者眼球移动的AR/VR眼镜。眼球移动数据可用于调整观看的图画,使得AR/VR设备佩戴体验更好。同步定位和映射(SLAM)是另一个重要应用,RV400的小尺度和低功耗可发挥至关重要的作用。
目前RV400已进入小量产阶段,可接受客户送样。
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2577文章
55495浏览量
793881 -
机器视觉
+关注
关注
166文章
4829浏览量
126492 -
人工智能
+关注
关注
1820文章
50318浏览量
266897
原文标题:机器视觉微型CIS传感器RV400
文章出处:【微信号:全栈芯片工程师,微信公众号:全栈芯片工程师】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
人工智能多模态与视觉大模型开发实战 - 2026必会
视觉大模型特训:从原理到部署一站式学会
在科技飞速发展的当下,视觉大模型已成为人工智能领域的一颗璀璨明星,广泛应用于安防监控、自动驾驶、医疗影像分析等众多领域,深刻改变着我们的生活与
发表于 04-15 16:06
赋能工业、消费及机器视觉: 贸泽开售 ams OSRAM Mira050 NIR增强全局快门图像传感器
) 增强全局快门图像传感器。Mira050是一款紧凑型0.5MP图像传感器,专为2D和3D消费类及工业机器

工业4.0的“数据桥梁”:图像采集卡如何撑起智能制造的视觉核心
工业4.0的本质是数据驱动的智能制造。在这个由物联网、大数据和人工智能构成的智慧工厂里,机器视觉系统扮演着“火眼金睛”的角色,而图像采集卡,

图像采集卡:机器视觉时代的图像数据核心枢纽
的采集、转换、传输与初步处理,搭建起图像传感器(相机/摄像头)与计算机之间的高速数据链路。其核心价值在于解决“原始图像信号如何高效、精准、稳定地转化为计算机可处理数据
安森美图像传感器在机器视觉的应用
下面的框图展示了采用安森美 (onsemi) 推荐产品的机器视觉方案,该方案集成了多种图像感知和深度感知技术,运用了安森美的全局和卷帘快门传感器系列产品。电源管理、通信等大多数功能块器

人形机器人传感器产业链最新分析:力、触觉、IMU、视觉传感器为主流!(全面)
在人工智能与机器人技术飞速发展的浪潮中,人形机器人正从科幻概念逐步走向现实应用,成为全球科技竞争的新焦点。而传感器作为人形机器人的“感官”,

iTOF技术,多样化的3D视觉应用
视觉传感器对于机器信息获取至关重要,正在从二维(2D)发展到三维(3D),在某些方面模仿并超越人类的视觉能力,从而推动创新应用。3D 视觉解
发表于 09-05 07:24
利用超微型 Neuton ML 模型解锁 SoC 边缘人工智能
我们所有的 SoC 都能用于边缘人工智能。例子包括:
预测性维护和楼宇自动化系统
在每个节点上进行本地数据分析的智能传感器网络
遥控器和可穿
发表于 08-31 20:54
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
。
同时,磁传感器还是多传感器融合中的 “稳定锚点”。在机器人运动系统的融合定位中,它常作为核心基准。以 “足球机器人” 项目为例,当视觉
发表于 08-26 10:02
挖到宝了!人工智能综合实验箱,高校新工科的宝藏神器
和生态体系带到使用者身边 ,让我们在技术学习和使用上不再受制于人。
三、多模态实验,解锁AI全流程
它嵌入了2D视觉、深度视觉、机械手臂、语音识别、嵌入式传感器等多种类AI模块,涵盖人工智能
发表于 08-07 14:30
挖到宝了!比邻星人工智能综合实验箱,高校新工科的宝藏神器!
和生态体系带到使用者身边 ,让我们在技术学习和使用上不再受制于人。
三、多模态实验,解锁AI全流程
它嵌入了2D视觉、深度视觉、机械手臂、语音识别、嵌入式传感器等多种类AI模块,涵盖人工智能
发表于 08-07 14:23
超小型Neuton机器学习模型, 在任何系统级芯片(SoC)上解锁边缘人工智能应用.
可以在广泛的传感器网络的每个节点上进行人工智能处理,而在这种网络中,传感器的尺寸和成本是关键,空间也非常宝贵。
发表于 07-31 11:38
最新人工智能硬件培训AI 基础入门学习课程参考2025版(大模型篇)
在人工智能大模型重塑教育与社会发展的当下,无论是探索未来职业方向,还是更新技术储备,掌握大模型知识都已成为新时代的必修课。从职场上辅助工作的智能助手,到课堂用于学术研究的智能工具,大模
发表于 07-04 11:10
全局快门图像传感器技术的改进提升了机器视觉效率
先进视觉系统应运而生,而高速、全画幅全局快门传感器是这些系统的核心。全局快门能够即时捕捉拍摄对象的完整视图,这非常重要。 基于全局快门的系统可以消除许多常见于视觉系统的
发表于 05-20 16:18
•2008次阅读
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
的本质是解决“鸡与蛋”问题:机器人需要地图来定位,又需要准确定位来构建地图。书中从前端(传感器数据处理)和后端(位姿优化)两个层面解析了SLAM的算法逻辑。
激光雷达和视觉SLAM各有优劣,例如激光
发表于 05-03 19:41



评论