 KUKAC4机器人电机风扇故障
KUKAC4机器人电机风扇故障

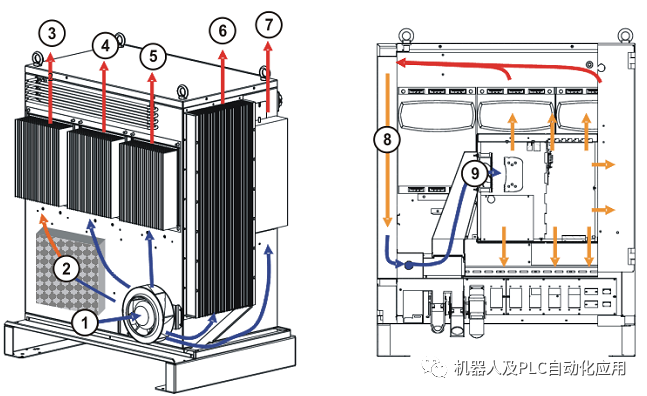
箱柜冷却系统说明:
箱柜冷却装置包含两条冷却循环回路。装有控制、功率电子元器件的箱内范围通过一个换热器进行散热。在箱柜的外部区域,KPP 和 KPS 的低压电源件、镇流电阻和散热体则直接通过外部空气适当冷却。
外部风扇更换步骤
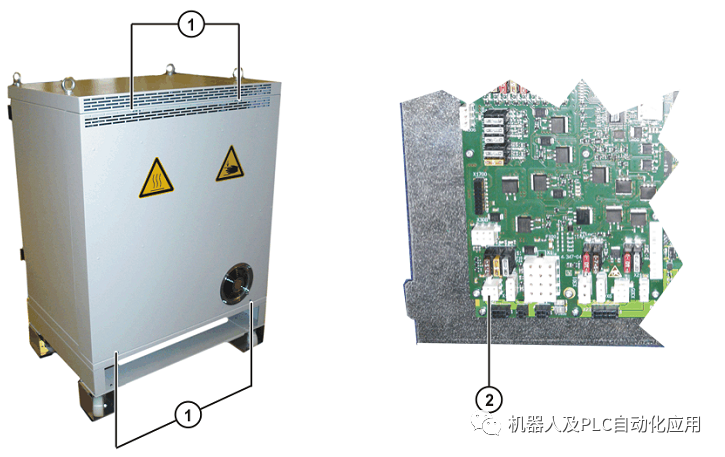
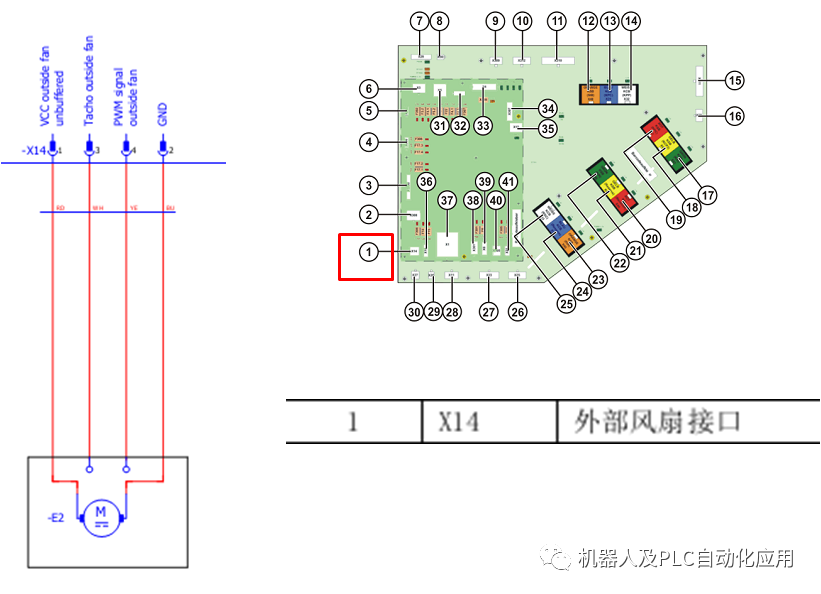
1. 从控制柜拔出风扇插头(2) X14。
2. 拧松四条螺丝(1) 并将背板拆出。
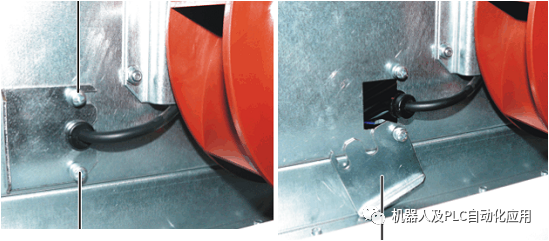
3. 将进线套筒的固定螺丝(1)拆出。
4. 将进线套筒(2)折回,然后拉出连接线。
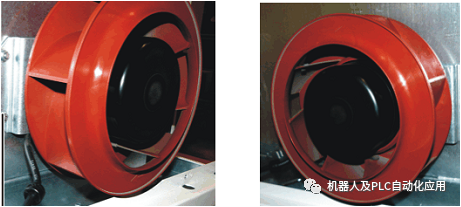
5. 将风扇支架(1) 连同风扇一起取下。
6. 将新风扇连同支架一起装上并固定。
7. 将连接线引入箱柜内。
8. 装上进线套筒。
9. 装上背板,并将其固定
10. 将风扇插头X14 插到控制柜上。

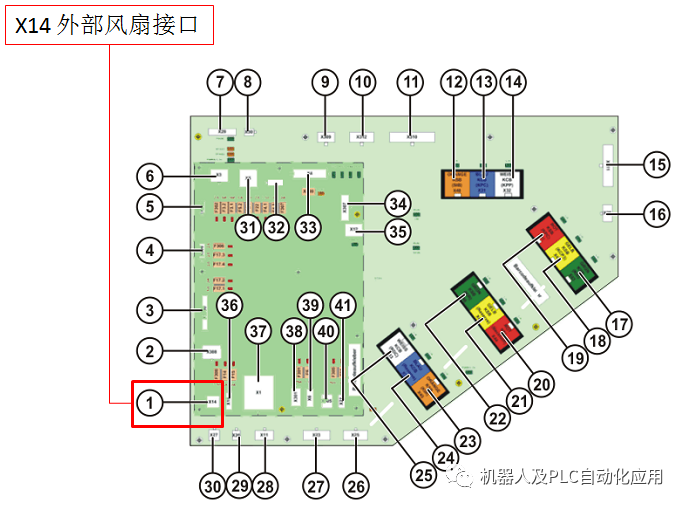
20.F14 外部风扇7.5 A
KUKA 机器人报:"外部风扇转速低故障"
对电箱外部风扇进行清理,进行关机冷启动.故障消除

--------------------END----------------------
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31675浏览量
224596 -
换热器
+关注
关注
4文章
268浏览量
18619 -
冷却装置
+关注
关注
0文章
5浏览量
6597
原文标题:KUKAC4机器人电机风扇故障,使得机器人没有好使能.
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
人形机器人关节扭矩传感器的详细应用场景及解决方案
机器人、精密装配手部关节(需<0.001Nm分辨率)。
优点 :无机械迟滞,极高分辨率。
缺点 :成本高,对污染敏感,结构复杂。
方案4:电流环+关节双编码器间接估计(无额外扭矩传感器
发表于 05-20 17:40
基于米尔RK3576核心板的国产割草机器人解决方案
GPIO中断引脚连接升降传感器和倾倒传感器,一旦检测到机器人被抬起或倾斜,芯片立即下达刀片急停指令,符合国内CCC安全认证要求。
4. 人机交互:国产通信与OTA升级
通过核心板集成的Wi-Fi 6
发表于 04-24 17:31
Neway电机方案在机器人技术方面的优势
,确保电机控制系统在长时间运行中不易出现故障。五、高效能与低损耗,提升系统能效背景:工业机器人关节需高精度、高响应速度的电机控制,电源模块需提供稳定直流电压并减少能量损耗。Neway方
发表于 03-30 09:39
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
2026年马年春晚四家机器人公司:宇树、魔法原子、银河通用、松延动力的高动态、高精度、高可靠表现,背后离不开低温烧结银在电机驱动、传感器
发表于 02-17 14:07
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
自制巡线解迷宫机器人(上)
一玩,当然如果你在使用的过程中遇到了一些问题,欢迎在GitHub上给我提交Issues或者在文章评论区里留言,有空的话我肯定会及时回复的。
巡线解迷宫机器人图1原理
硬件
电机电源层
电机电源层
发表于 10-20 10:39
集成多摩川磁性编码器的伺服电机与机器人关节设计创新
在科技日新月异的今天,机器人正以前所未有的态势融入我们的生产生活。从工业流水线上不知疲倦的机械臂,到家庭中灵活可爱的扫地机器人,它们的身影无处不在。而在机器人的核心部件中,伺服电机和
人形机器人关节电机:永磁电机类型解析
随着人形机器人加速商业化,电机作为驱动关节运动的关键部件,在人形机器人上使用的电机种类根据其设计目标和功能需求而有所不同,主要包括伺服电机、

MEMS风扇:让机器人告别“龟速”与“追跑”,散热革命引爆赛场新速度!
机器人大赛中所暴露的“人追机器人”现象,本质上是高功率机器人系统对散热技术革新的迫切呐喊。而MEMS风扇的出现,让我们看到了一条更高效、更稳

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
故障率从 15% 降至 3% 以下。随着磁隧道结 (MTJ) 等新型技术成熟,下一代磁传感器有望实现纳米级精度、皮秒级响应速度,或使机器人 “高速竞速” 最高速度提升 40%;柔性磁传感器研发也将让
发表于 08-26 10:02
蓝思科技:今年承接智元机器人全系列多款人形机器人业务
电子发烧友网综合报道 8月4日,蓝思科技在接受调研时披露公司在人形机器人领域的最新进展。蓝思科技表示,2024年起已为合作伙伴交付数百台整机,今年则承接了智元机器人全系列多款人形机器人
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
轮式移动机器人电机驱动系统的研究与开发
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间模型进行了分析和计算,研究和设计了自主移动机器人
发表于 06-11 14:30



评论