 CMSIS_V1和CMSIS_V2有什么区别呢?该怎么选择呢?
CMSIS_V1和CMSIS_V2有什么区别呢?该怎么选择呢?

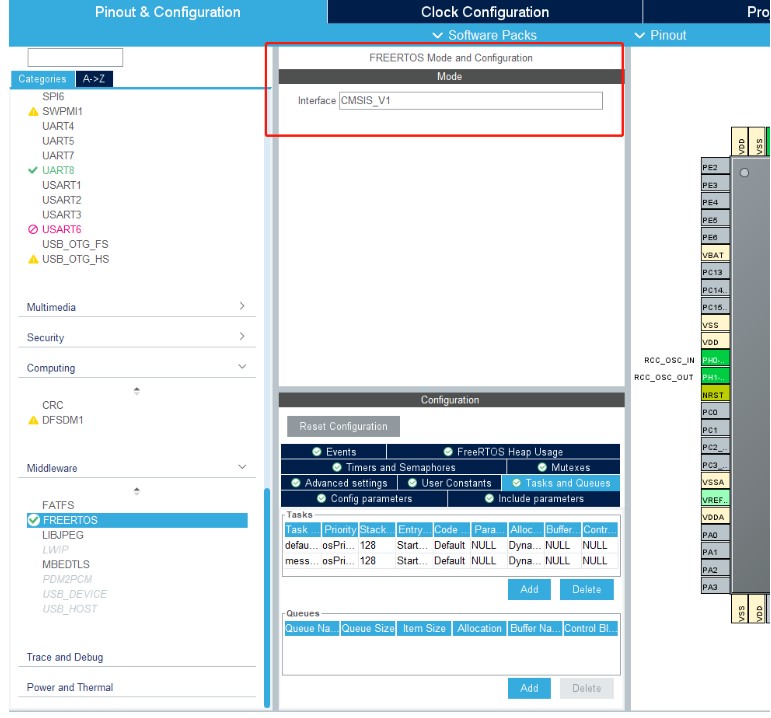
STM32CubeIDE在stm32开发者起着最基础的作用,在STM32CubeIDE中配置FreeRTOS中间层时需要选择interface,其中有三个选项:Disable、CMSIS_V1和CMSIS_V2
CMSIS定义了通用工具接口,并提供一致的设备支持,那么CMSIS_V1和CMSIS_V2有什么区别呢,该怎选择呢?
微控制器软件接口标准CMSIS
CMSIS ARM官方定义如下:
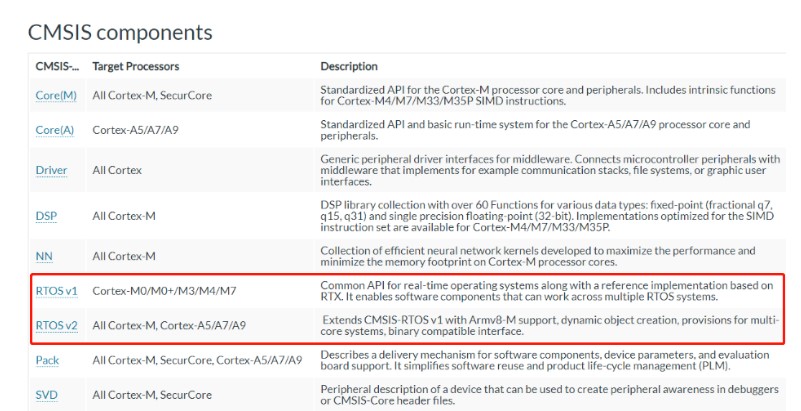
Cortex微控制器软件接口标准(CMSIS)是独立于供应商的硬件抽象层,用于基于Arm Cortex处理器的微控制器,并且CMSIS提供了到处理器和外围设备,实时操作系统以及中间件组件的接口,可以说非常实用。
CMSIS软件接口简化了软件重用,减少了开发周期,而且也不受限操作系统的类型,去耦。
不同之处
RTOS v1使得软件能够在不同的实时操作系统下运行(屏蔽不同RTOS提供的API的差别)
而RTOS v2则是拓展了RTOS v1,兼容更多的CPU架构和实时操作系统。
RTOS v1创建任务函数如下:
/***********************ThreadManagement*****************************/ /** *@briefCreateathreadandaddittoActiveThreadsandsetittostateREADY. *@paramthread_defthreaddefinitionreferencedwith efosThread. *@paramargumentpointerthatispassedtothethreadfunctionasstartargument. *@retvalthreadIDforreferencebyotherfunctionsorNULLincaseoferror. *@noteMUSTREMAINUNCHANGED:osThreadCreateshallbeconsistentineveryCMSIS-RTOS. */ osThreadIdosThreadCreate(constosThreadDef_t*thread_def,void*argument) { TaskHandle_thandle; #if(configSUPPORT_STATIC_ALLOCATION==1)&&(configSUPPORT_DYNAMIC_ALLOCATION==1) if((thread_def->buffer!=NULL)&&(thread_def->controlblock!=NULL)){ handle=xTaskCreateStatic((TaskFunction_t)thread_def->pthread,(constportCHAR*)thread_def->name, thread_def->stacksize,argument,makeFreeRtosPriority(thread_def->tpriority), thread_def->buffer,thread_def->controlblock); } else{ if(xTaskCreate((TaskFunction_t)thread_def->pthread,(constportCHAR*)thread_def->name, thread_def->stacksize,argument,makeFreeRtosPriority(thread_def->tpriority), &handle)!=pdPASS){ returnNULL; } } #elif(configSUPPORT_STATIC_ALLOCATION==1) handle=xTaskCreateStatic((TaskFunction_t)thread_def->pthread,(constportCHAR*)thread_def->name, thread_def->stacksize,argument,makeFreeRtosPriority(thread_def->tpriority), thread_def->buffer,thread_def->controlblock); #else if(xTaskCreate((TaskFunction_t)thread_def->pthread,(constportCHAR*)thread_def->name, thread_def->stacksize,argument,makeFreeRtosPriority(thread_def->tpriority), &handle)!=pdPASS){ returnNULL; } #endif returnhandle; }
RTOS v2创建任务函数如下:
osThreadId_tosThreadNew(osThreadFunc_tfunc,void*argument,constosThreadAttr_t*attr){ constchar*name; uint32_tstack; TaskHandle_thTask; UBaseType_tprio; int32_tmem; hTask=NULL; if(!IS_IRQ()&&(func!=NULL)){ stack=configMINIMAL_STACK_SIZE; prio=(UBaseType_t)osPriorityNormal; name=NULL; mem=-1; if(attr!=NULL){ if(attr->name!=NULL){ name=attr->name; } if(attr->priority!=osPriorityNone){ prio=(UBaseType_t)attr->priority; } if((prio< osPriorityIdle) || (prio >osPriorityISR)||((attr->attr_bits&osThreadJoinable)==osThreadJoinable)){ return(NULL); } if(attr->stack_size>0U){ /*InFreeRTOSstackisnotinbytes,butinsizeof(StackType_t)whichis4onARMports.*/ /*Stacksizeshouldbetherefore4bytealignedinordertoavoiddivisioncausedsideeffects*/ stack=attr->stack_size/sizeof(StackType_t); } if((attr->cb_mem!=NULL)&&(attr->cb_size>=sizeof(StaticTask_t))&& (attr->stack_mem!=NULL)&&(attr->stack_size>0U)){ mem=1; } else{ if((attr->cb_mem==NULL)&&(attr->cb_size==0U)&&(attr->stack_mem==NULL)){ mem=0; } } } else{ mem=0; } if(mem==1){ #if(configSUPPORT_STATIC_ALLOCATION==1) hTask=xTaskCreateStatic((TaskFunction_t)func,name,stack,argument,prio,(StackType_t*)attr->stack_mem, (StaticTask_t*)attr->cb_mem); #endif } else{ if(mem==0){ #if(configSUPPORT_DYNAMIC_ALLOCATION==1) if(xTaskCreate((TaskFunction_t)func,name,(uint16_t)stack,argument,prio,&hTask)!=pdPASS){ hTask=NULL; } #endif } } } return((osThreadId_t)hTask); }
正常V1够用了,普通功能选V1,高级功能选择V2:
我分别选择CMSIS_V1和CMSIS_V2编译了两次进行对比,CMSIS_V2都要大一些。
审核编辑:刘清
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
微控制器
+关注
关注
49文章
8829浏览量
165577 -
处理器
+关注
关注
68文章
20325浏览量
254684 -
CMSIS
+关注
关注
0文章
41浏览量
13021 -
stm32cubemx
+关注
关注
5文章
290浏览量
17469
发布评论请先 登录
相关推荐
热点推荐
基于 X-Cube-FreeRTOS_Heap4 和 CubeMX 生成 UCPD 项目介绍
生成 STM32H563 的 USB-PD Sink 的应用不是那么顺畅,文章中介绍的是 CMSIS_V1,但现在最新的是 CMSIS_V2,客户希望我们予以支持指导。2. 环境准备硬件:仅 NUCLEO-H563ZI (MB
发表于 04-15 15:59
•0次下载
Boost、Buck-Boost、Sepic拓扑有什么区别
工程师们在做电源设计时经常会有升压的需求,而常用的Boost、Buck-Boost、Sepic拓扑均可实现升压。这些拓扑有什么区别,该选哪个呢?

如何使用 powerquad 加速器中的一些功能以及 CMSIS 原始实现中的一些功能?
fsl_powerquad_cmsis.c 使用 PowerQuad 实现了许多 CMSIS 功能。许多是有用的,许多是无用的,因为 powerquad 的数据大小受到限制(例如
发表于 04-03 06:37
请教TJA1028DT和TJA1028T/5V0/20有什么区别?
这两款芯片有什么区别,或者更确切地说,TJA1028DT比TJA1028T/5V0/20有什么优势?
发表于 03-18 07:27
JLink、STLink、DAPLink、CMSIS DAP使用的区别
多少人使用(x宝也很少展示量),论字母排名顺序也远没到它,那它为毛整齐地霸着Keil选项中的头三把座椅呢???我的大爱CMSIS-DAP和神器J-Link都得老实排在它屁股后面?这家伙到底几斤几两
发表于 01-22 07:51

基于 X-Cube-FreeRTOS_Heap4 和 CubeMX 生成 UCPD 项目介绍
STM32H563 的 USB-PD Sink 的应用不是那么顺畅,文章中介绍的是 CMSIS_V1,但现在最新的是 CMSIS_V2,客户希望我们予以支持指导。
发表于 01-04 11:18
•0次下载
系统调用和API有什么区别呢?
首先,什么是API呢?以汽车发动机为例:
档把就是发动机给你提供的api,当你想让汽车前进时只需要将其挂到“D”档位,然后轻踩油门就可以前进了,当你挂挡时你根本就不需要关心汽油是怎么进到发动机
发表于 12-03 06:52
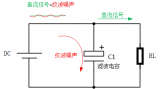
详解电容滤波与电感滤波的区别
在电子电路中,常常会用到滤波电路,尤其是电源芯片,有的是电容滤波,有的是电感滤波,电容和电感滤波的作用看起来差不多,那么它们之间有什么区别呢?在实际应用中又如何选择
如何使用CMSIS DAP仿真器调试,通过NucleiStudio调试蜂鸟SOC
,以及openocd软件生态,符合蜂鸟SOC的调试需求
具体步骤
1. 只需要修改调试脚本就可以了
红框框出来的这里
2. 我们分享我们更改的脚本
3. 然后就可以调试啦
发表于 10-21 12:05
CBB82电容和CBB81电容有什么区别
CBB81电容大家都不陌生,它属于高压谐振电容器,在很多高压、高频、大电流电路中,都能见到它的身影,还有一种电容器叫CBB82电容,两者只有一字之差,有什么区别呢?
请问是否可以将 Nu-Link2-Me V1.0 的固件升级到 V2.0?
0416:2004 华邦电子股份有限公司 Nu-Link2 CMSIS-DAP
Nu-Link2-Me V1.0:总线 001 设备 020:ID 0416:5200 华邦电子股份有
发表于 08-18 08:09
请问CYW2019B2的SPI1与SPI2有什么区别?
请问:
CYW2019B2的SPI1与SPI2有什么区别?SPI接口工作于Slave方式,接收外设的数据。如果设为SPI
发表于 07-08 07:51
使用MiniProg4通过ModusToolBox软件调试CYW920820M2EVB-01,遇到报错怎么解决?
上的 telnet 连接
信息:使用 CMSIS-DAPv2 接口,VID:PID=0x04b4:0xf151, 序列号=0E1816E8021D2400
信息:CMSIS-DAP:支持 SWD
发表于 07-01 08:24



评论