 机器人里的高效伺服系统
机器人里的高效伺服系统

电子发烧友网报道(文/李宁远)在机器人行业里,伺服驱动是一个老生常谈的话题了。随着工业4.0的加速更迭,机器人的伺服驱动也随之升级。现在的机器人系统既要求驱动系统能控制更多的轴数,还要能实现更多智能化的功能。
在多轴工业机器人运行中的每个节点上,它必须在三个维度上使用不同大小的力才能完成设定的搬运等任务。机器人中的电机能够在精确的点提供可变速度和扭矩,控制器使用它们沿着不同的轴协调运动,从而实现精确的定位。在机器人完成搬运任务后,电机会减小扭矩,同时将机械臂返回到其初始位置。
这种高效伺服系统由高性能控制信号处理、精确感应反馈、电源以及智能电机驱动一起组成,提供复杂的接近瞬时响应的精确速度和扭矩控制。
高速实时伺服环路控制—控制信号处理与感应反馈
伺服环路实现高速数字化实时控制的基础离不开微电子制造工艺的升级。以最常见的三相电运行的机器人电机为例,PWM三相逆变器生成高频脉冲电压波形,以独立相将这些波形输出到电机的三相绕组中。在这三个功率信号中,电机负载的变化会影响感应、数字化并发送到数字处理器的电流反馈。再由数字处理器进行高速信号处理算法决定输出。
这里不仅要求数字处理器的高性能,对电源也有严格的设计要求。我们先看处理器部分,内核运算速度必须要跟上自动化升级的脚步,这个现在已经不再是问题。一些运控芯片将电机控制所必需的A/D转换器、位置/速度检测倍频计数器、PWM发生器等等与处理器内核集成于一体,使得伺服控制回路采样时间大大缩短,由单一芯片实现了自动加减速控制,齿轮同步控制,位置、速度、电流三环的数字化补偿控制。
控制算法如速度前馈、加速度前馈、低通滤波、凹陷滤波也在单芯片上实现。处理器的选取这里不再赘述,在此前的文章中已经对各类机器人应用做过分析,不管是低成本应用,还是对编程和算法有较高要求的应用目前市面上已经有很多选择,优势各异。
不只是电流反馈,其他的感应数据也会送到控制器中来跟踪系统电压和温度的变化。高分辨率的电流和电压检测反馈一直是电机控制里的难题。同时检测所有分流器/霍尔传感器/磁传感器的反馈无疑是最好的,不过这样对设计有很高的要求,而且计算能力要跟得上。
同时为了避免信号的丢失和干扰,在靠近传感器的边缘对信号进行数字化,随着采样率上升,信号漂移带来的数据错误也不少,设计需要通过感应和算法调整对这些变化进行补偿。这样伺服系统才能在各种条件下保持稳定。
可靠精准伺服驱动—电源与智能电机驱动
具有稳定高分辨率控制的超高速开关功能的电源为可靠精准的伺服控制供电,目前有很多厂商都有采用高频材料的集成式电源模块,设计起来容易了很多。
开关模式电源在基于控制器的闭环电源拓扑中运行,两种常用的电源开关是功率MOSFET和IGBT。栅极驱动器在采用开关模式电源的系统中很常见,开关模式电源通过对ON/OFF状态的控制在这些开关的栅极上进行调节电压和电流。
在开关模式电源和三相逆变器的设计上,各类高性能的智能栅极驱动器、内置FET的驱动器、集成控制功能的驱动器层出不穷。内置FET和电流采样功能的集成设计,可以大幅减少外部元器件的使用,PWM和使能、上下管、霍尔信号输入逻辑配置大大增加了设计的灵活性,既简化了开发流程,又提升了电源效率。
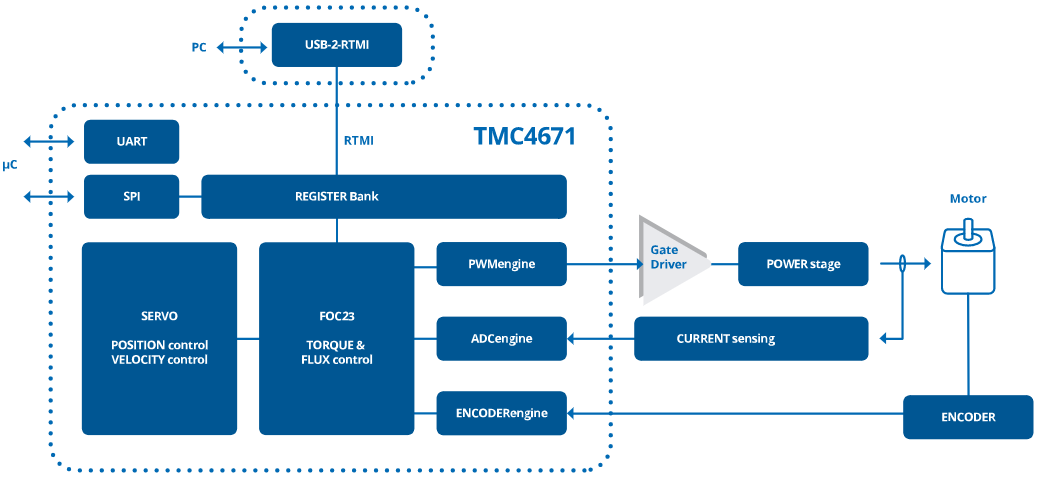
伺服驱动IC也将集成度发挥到最大,完全集成的伺服驱动IC可以大大缩短伺服系统出色动态性能的开发时间。预驱、传感、保护电路和电源桥集成到一个封装中可以最大限度地降低整体功耗和系统成本。这里列的是Trinamic(ADI)的完全集成式的伺服驱动IC框图,所有控制功能都在硬件中实现,集成ADC、位置传感器接口、位置内插器,功能齐全适用于各种伺服应用。
小结
高效伺服系统里高性能控制信号处理、精确感应反馈、电源以及智能电机驱动缺一不可,高性能器件的相互配合才能给机器人实时提供在运动中瞬间响应的精确速度与扭矩控制。在更高的性能之余,各个模块的高集成度也提供了更低的成本和更高的工作效率。
在多轴工业机器人运行中的每个节点上,它必须在三个维度上使用不同大小的力才能完成设定的搬运等任务。机器人中的电机能够在精确的点提供可变速度和扭矩,控制器使用它们沿着不同的轴协调运动,从而实现精确的定位。在机器人完成搬运任务后,电机会减小扭矩,同时将机械臂返回到其初始位置。
这种高效伺服系统由高性能控制信号处理、精确感应反馈、电源以及智能电机驱动一起组成,提供复杂的接近瞬时响应的精确速度和扭矩控制。
高速实时伺服环路控制—控制信号处理与感应反馈
伺服环路实现高速数字化实时控制的基础离不开微电子制造工艺的升级。以最常见的三相电运行的机器人电机为例,PWM三相逆变器生成高频脉冲电压波形,以独立相将这些波形输出到电机的三相绕组中。在这三个功率信号中,电机负载的变化会影响感应、数字化并发送到数字处理器的电流反馈。再由数字处理器进行高速信号处理算法决定输出。
这里不仅要求数字处理器的高性能,对电源也有严格的设计要求。我们先看处理器部分,内核运算速度必须要跟上自动化升级的脚步,这个现在已经不再是问题。一些运控芯片将电机控制所必需的A/D转换器、位置/速度检测倍频计数器、PWM发生器等等与处理器内核集成于一体,使得伺服控制回路采样时间大大缩短,由单一芯片实现了自动加减速控制,齿轮同步控制,位置、速度、电流三环的数字化补偿控制。
控制算法如速度前馈、加速度前馈、低通滤波、凹陷滤波也在单芯片上实现。处理器的选取这里不再赘述,在此前的文章中已经对各类机器人应用做过分析,不管是低成本应用,还是对编程和算法有较高要求的应用目前市面上已经有很多选择,优势各异。
不只是电流反馈,其他的感应数据也会送到控制器中来跟踪系统电压和温度的变化。高分辨率的电流和电压检测反馈一直是电机控制里的难题。同时检测所有分流器/霍尔传感器/磁传感器的反馈无疑是最好的,不过这样对设计有很高的要求,而且计算能力要跟得上。
同时为了避免信号的丢失和干扰,在靠近传感器的边缘对信号进行数字化,随着采样率上升,信号漂移带来的数据错误也不少,设计需要通过感应和算法调整对这些变化进行补偿。这样伺服系统才能在各种条件下保持稳定。
可靠精准伺服驱动—电源与智能电机驱动
具有稳定高分辨率控制的超高速开关功能的电源为可靠精准的伺服控制供电,目前有很多厂商都有采用高频材料的集成式电源模块,设计起来容易了很多。
开关模式电源在基于控制器的闭环电源拓扑中运行,两种常用的电源开关是功率MOSFET和IGBT。栅极驱动器在采用开关模式电源的系统中很常见,开关模式电源通过对ON/OFF状态的控制在这些开关的栅极上进行调节电压和电流。
在开关模式电源和三相逆变器的设计上,各类高性能的智能栅极驱动器、内置FET的驱动器、集成控制功能的驱动器层出不穷。内置FET和电流采样功能的集成设计,可以大幅减少外部元器件的使用,PWM和使能、上下管、霍尔信号输入逻辑配置大大增加了设计的灵活性,既简化了开发流程,又提升了电源效率。
伺服驱动IC也将集成度发挥到最大,完全集成的伺服驱动IC可以大大缩短伺服系统出色动态性能的开发时间。预驱、传感、保护电路和电源桥集成到一个封装中可以最大限度地降低整体功耗和系统成本。这里列的是Trinamic(ADI)的完全集成式的伺服驱动IC框图,所有控制功能都在硬件中实现,集成ADC、位置传感器接口、位置内插器,功能齐全适用于各种伺服应用。
小结
高效伺服系统里高性能控制信号处理、精确感应反馈、电源以及智能电机驱动缺一不可,高性能器件的相互配合才能给机器人实时提供在运动中瞬间响应的精确速度与扭矩控制。在更高的性能之余,各个模块的高集成度也提供了更低的成本和更高的工作效率。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31639浏览量
224533 -
伺服系统
+关注
关注
14文章
611浏览量
41946
发布评论请先 登录
相关推荐
热点推荐
在 VisionFive 2 上实现机器人伺服控制
据StarFive介绍,开发者已经在VisionFive/VisionFive 2上成功实现了机器人伺服控制,具体说明如下:
1. Preparation
Development board
发表于 03-05 07:09
提高步进伺服系统精度的措施
步进伺服系统作为现代工业自动化领域中的重要执行元件,其精度直接影响设备加工质量与生产效率。随着智能制造对运动控制要求的不断提高,如何提升步进伺服系统的精度成为工程师关注的核心问题。本文将从机械结构优化、控制策略改进、误差补偿技术及系统

伺服系统的常见故障和诊断方法
伺服系统作为现代工业自动化中的核心部件,广泛应用于数控机床、机器人、包装机械等领域。其高精度、快速响应的特性对设备性能至关重要,但复杂的结构也使得故障诊断成为维护难点。本文将系统分析伺服系统
SiC碳化硅矩阵变换器在机器人关节伺服系统中的拓扑精简与高动态响应
倾佳杨茜-伺服方案:SiC碳化硅矩阵变换器在机器人关节伺服系统中的拓扑精简与高动态响应技术深度赋能研究报告 引言:下一代机器人关节伺服驱动的

再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
科技:《武 BOT》:H2人形机器人31个高精度关节、单臂7自由度,完成醉拳、双截棍、舞剑,同步误差**< 0.1秒;核心是高功率密度伺服电机+高速控制+**强散热。
**魔法原子:《智造
发表于 02-17 14:07
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 利用开发板上的MIPI CSI1和CSI2接口,完整接入8路摄像头,实现了所有通道的视频预览与采集,为机器人构建了全方位的视觉感知系统。卓越性能表现:· CPU占用率:34%· DDR占用率:50
发表于 10-29 16:41
AI驱动工业自动化升级:芯森电子CR1V闭环霍尔电流传感器如何实现机器人伺服系统的精准控制
当前已经进入工业4.0时代,人工智能技术正推动制造业向智能化、柔性化转型。机器人伺服系统作为智能制造的核心组成部分,其控制精度直接影响生产效率和产品质量,电流传感器作为伺服系统的“感知神经”,是AI

工业机器人关键部件迭代升级,永铭高性能电容器应用领航!
精度和智能化发展,要求电容器等元器件具备卓越的稳定性、抗干扰性和长寿命,确保系统高效可靠运行。YMIN01工业机器人伺服电机驱动器工业机器人

人形机器人伺服电机驱动器新动力:高性能电容器的协同作用
PART1人形机器人心脏:伺服电机驱动器随着人工智能和机器人技术的飞速发展,人形机器人正逐步成为智能制造和未来生活的新伙伴。在这一领域,
集成多摩川磁性编码器的伺服电机与机器人关节设计创新
起着决定性作用。今天,我们就来聊聊集成多摩川磁性编码器的伺服电机与机器人关节的设计创新,这可是机器人领域里的一项大突破!
MT6816磁编码器的伺服系统小型化与高性价比设计
在工业自动化和机器人技术领域,伺服系统的性能直接影响设备的精度和响应速度。作为伺服系统的核心部件,磁编码器的性能优劣直接决定了整个系统的表现。MT6816磁编码器凭借其高精度、小型化和

MT6701绝对式磁编码器优化机器人关节伺服控制
在当今科技飞速发展的时代,机器人已经广泛应用于工业制造、物流配送、医疗服务等众多领域。而机器人关节伺服控制作为机器人运动的关键技术,其性能的优劣直接影响着
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
网络化多电机伺服系统监控终端设计
稳定可靠的多功能监控终端很有必要。
本文设计了一种基于CAN总线和PC/104嵌人式计算机的多电机伺服系统监控终端。可设置各电机的工作模式和控制器参数,通过图形方式实时显示负载位置、各电机的速度和电流等
发表于 06-23 07:15
伺服系统和PLC各自在什么场合使用
、铣削、钻孔等高精度加工。 案例 :伺服系统控制刀具的精确移动,实现±0.001mm的加工精度。 机器人关节控制 场景 :工业机器人、协作机器人(如焊接、装配、搬运)。 案例 :



评论