 伺服系统在机器人中的作用 伺服系统与传统电机对比
伺服系统在机器人中的作用 伺服系统与传统电机对比

伺服系统在机器人中的作用
机器人技术是现代工业自动化的重要组成部分,它涉及到机械、电子、计算机科学、控制理论等多个学科。在这些技术中,伺服系统扮演着至关重要的角色。伺服系统是一种能够精确控制机械设备位置、速度和加速度的系统,它通过接收控制信号来驱动电机,实现对机器人关节的精确控制。
- 精确控制:伺服系统能够提供精确的速度和位置控制,这对于执行复杂任务的机器人来说至关重要。例如,在装配线上,机器人需要精确地将零件放置在正确的位置,这就需要伺服系统来确保动作的准确性。
- 响应速度:伺服系统能够快速响应控制信号,这对于需要快速反应的机器人任务非常重要。例如,在包装线上,机器人需要快速抓取和放置物品,以保持生产线的流畅。
- 稳定性:伺服系统能够提供稳定的控制,即使在负载变化或外部干扰的情况下也能保持性能。这对于需要长时间连续工作的机器人来说非常重要。
- 节能:现代伺服系统通常具有较高的能效,这意味着它们可以在不牺牲性能的情况下减少能源消耗。
- 可编程性:伺服系统通常可以与高级控制算法配合使用,允许机器人执行复杂的任务序列。
伺服系统与传统电机对比
伺服系统与传统电机在多个方面存在显著差异,以下是一些主要的对比点:
- 控制精度:伺服系统提供更高的控制精度,能够实现精确的位置和速度控制。相比之下,传统电机通常只能提供开环控制,即电机的运行不受反馈信号的影响,控制精度较低。
- 动态响应:伺服电机通常具有更好的动态响应,这意味着它们能够更快地响应控制信号的变化。传统电机的响应速度通常较慢,尤其是在负载变化时。
- 力矩控制:伺服系统能够提供精确的力矩控制,这对于需要精确控制力的应用(如精确的机械手臂)非常重要。传统电机通常不具备这种能力。
- 能耗:伺服系统通常比传统电机更节能,因为它们可以根据实际需要提供精确的动力,而不是像传统电机那样提供恒定的输出。
- 寿命和维护:由于伺服系统的设计更为复杂,它们可能需要更频繁的维护。然而,现代伺服系统的设计已经考虑到了这一点,许多系统都具有自我诊断功能,可以减少维护需求。
- 成本:伺服系统的成本通常高于传统电机,但随着技术的进步,这种差距正在缩小。此外,伺服系统在提高生产效率和减少能源消耗方面的长期效益可能会超过其初期投资成本。
- 应用范围:伺服系统适用于需要高精度和高性能控制的应用,而传统电机则适用于对控制精度要求不高的应用。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31634浏览量
224491 -
电机
+关注
关注
145文章
9743浏览量
155021 -
伺服系统
+关注
关注
14文章
611浏览量
41942 -
机械设备
+关注
关注
0文章
373浏览量
20680
发布评论请先 登录
相关推荐
热点推荐
伺服系统被现场氩弧焊机的干扰问题处理
氩弧焊机的高频引弧(几千伏、几十万赫兹)是极强的干扰源,会导致伺服系统出现位置偏差、无故报警或误动作。这是一个典型的电磁兼容(EMC)问题,需要从 电源、布线与接地、信号隔离 三个维度综合治理
伺服系统调试经验分享及常见问题分析与解决方法
伺服系统调试是工业自动化领域中的一项关键技术,其性能直接影响到设备的精度、速度和稳定性。通过多年的实践与总结,我积累了一些伺服调试的心得体会,现分享如下,希望能对同行有所帮助。
提高步进伺服系统精度的措施
步进伺服系统作为现代工业自动化领域中的重要执行元件,其精度直接影响设备加工质量与生产效率。随着智能制造对运动控制要求的不断提高,如何提升步进伺服系统的精度成为工程师关注的核心问题。本文将从机械结构优化、控制策略改进、误差补偿技术及系统

麦歌恩磁编码器异常对伺服系统运行影响分析
麦歌恩磁编码器作为伺服系统的“感知核心”,承担三大关键角色:一是位置反馈,为位置环提供实时转子位置信号,保障定位精度;二是速度解算,通过相邻位置信号的时间差计算电机转速,支撑速度环闭环调节;三是换向
伺服系统的常见故障和诊断方法
伺服系统作为现代工业自动化中的核心部件,广泛应用于数控机床、机器人、包装机械等领域。其高精度、快速响应的特性对设备性能至关重要,但复杂的结构也使得故障诊断成为维护难点。本文将系统分析伺服系统
SiC碳化硅矩阵变换器在机器人关节伺服系统中的拓扑精简与高动态响应
倾佳杨茜-伺服方案:SiC碳化硅矩阵变换器在机器人关节伺服系统中的拓扑精简与高动态响应技术深度赋能研究报告 引言:下一代机器人关节

一文解析伺服系统CN1接口的DI/DO端子功能
本文详细深入的介绍了伺服系统CN1接口的DI(数字量输入)和DO(数字量输出)端子功能定义、逻辑选择原理、硬件接线规范,明确了各端子的功能分类、参数关联及典型应用场景,重点辨析了易混淆功能的核心差异

ADI Trinamic如何让伺服系统开发化繁为简
“刚搞定FOC算法调试,又卡在编码器协议解码;好不容易凑齐分立器件,却发现系统功耗超标”——这大概是不少伺服系统开发者的日常。随着设备中的电机数量日渐增多,传统开发模式下的硬件堆叠、软

伺服电机增益详解
伺服电机增益调节是运动控制中的核心环节,直接影响系统的响应速度、稳定性和精度。本文将深入解析增益参数的作用机理、调节方法及典型应用场景,帮助工程师实现
MT6816磁编码器的伺服系统小型化与高性价比设计
在工业自动化和机器人技术领域,伺服系统的性能直接影响设备的精度和响应速度。作为伺服系统的核心部件,磁编码器的性能优劣直接决定了整个系统的表现

无速度传感器永磁同步直线电机伺服系统的自适应鲁棒控制
摘要:为了提高永磁同步直线电机伺服系统的动态性能,提出了一种新型的自适应鲁棒控制器。该控制器不含电机参教,只与系统的状态变量有关,从而降低了对系统
发表于 07-09 14:24
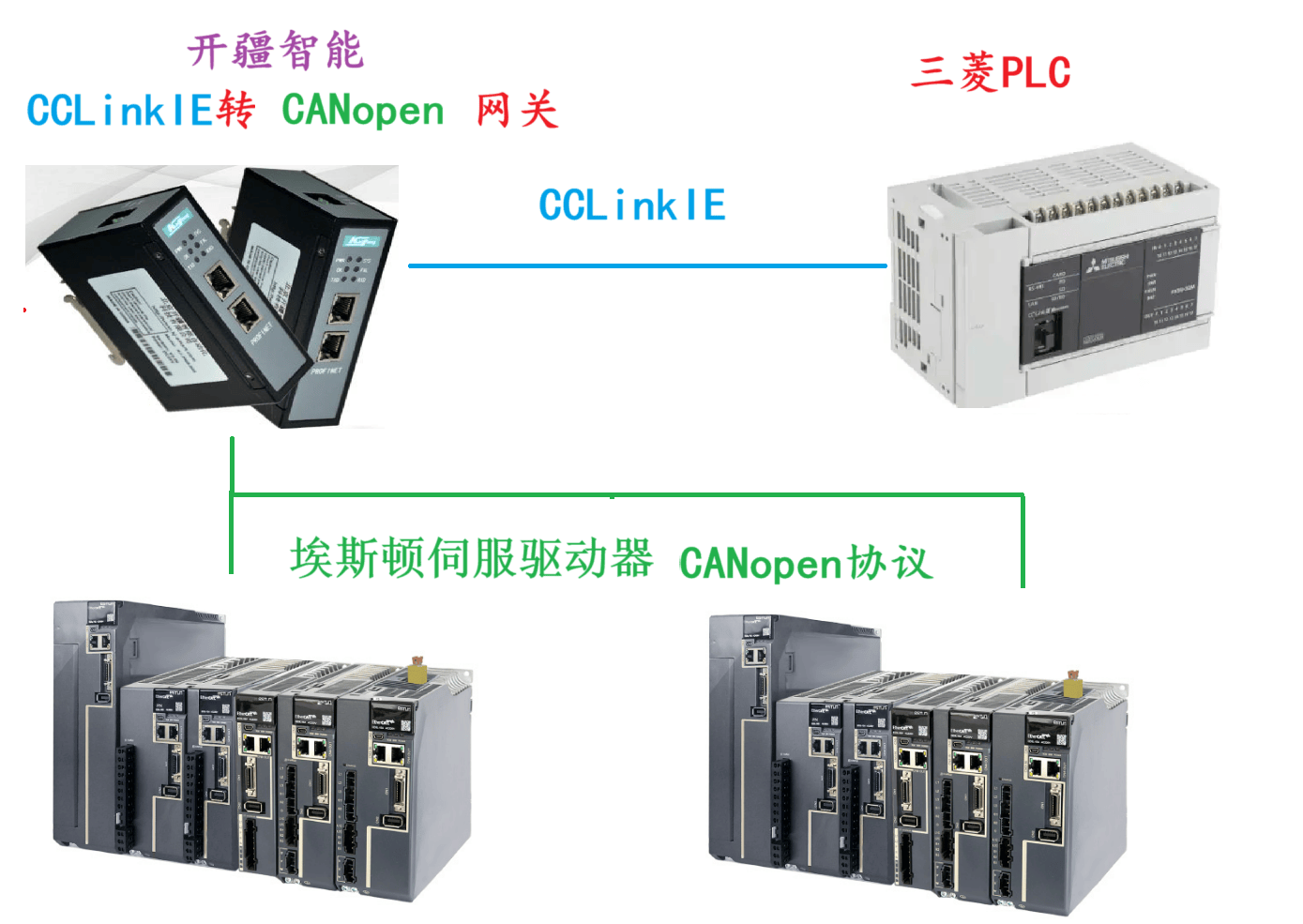
开疆智能CANopen转CCLinkIE网关连接埃斯顿伺服系统配置案例
本案例是三菱PLC通过CCLinkIE转CANopen网关控制埃斯顿伺服系统的配置案例。
网络化多电机伺服系统监控终端设计
在多电机伺服系统的调试及使用过程中,需要实时获取系统运行时各个电机和负载的运行状态数据,并通过对相应数据的分析进行控制器参数的整定和故障判断
发表于 06-23 07:15
伺服系统和PLC各自在什么场合使用
、铣削、钻孔等高精度加工。 案例 :伺服系统控制刀具的精确移动,实现±0.001mm的加工精度。 机器人关节控制 场景 :工业机器人、协作机器人(如焊接、装配、搬运)。 案例 :



评论