 视频拼接的实时性要求
视频拼接的实时性要求

输入输出接口 Input: (1)4个摄像头采集的图像视频分辨率 (整型int) (2)4个摄像头采集的图像视频格式 (RGB,YUV,MP4等) (3)摄像头标定参数(中心位置(x,y)和5个畸变 系数(2径向,2切向,1棱向),浮点型float) (4)摄像头初始化参数(摄像头初始位置和三个坐标方向 的旋转角度,车辆宽度高度车速等等,浮点型float) Output: (1)图像融合和拼接的image/video的坐标位置(浮点型float) (2)图像融合和拼接的图像视频分辨率(整型int) (3)图像融合和拼接的图像视频格式 (RGB,YUV,MP4等) (4)车辆周围障碍物报警 (字符型char)22.1功能定义 1)计算图像融合和拼接的image/video的坐标位置。 2)算出图像融合和拼接的图像视频分辨率。 3)确定图像融合和拼接的图像视频格式。 4)检测车辆周围障碍物并报警。22.2技术路线方案 在360°全景视图泊车辅助系统中,通过安装在车辆前、后、左、右 4 个方位的广角摄像头采集车辆四周的视频影像,利用图像融合和拼接技术合成一幅车身周围的全景视图,最后在中控台的屏幕上显示,以扩大驾驶员视野。借助360°全景视图泊车辅助系统,驾驶员坐在车中即可直观地看到车辆周围是否存在障碍物以及障碍物的相对方位与距离,以便在狭窄拥堵的停车场从容操控车辆泊车入位或通过复杂的路面,可有效防止刮蹭、碰撞、陷落等事故的发生。同时,全景视图也可以为自动驾驶系统中识别、检测、跟踪等算法提供支持。 富士通(Fujitsu)开发的视频成像技术, 可实时实现车辆的完整360°环绕视图。四个相机安装在车辆前后左右周边,车辆周围环境的视频图像通过富士通的3D虚拟投影/视点转换技术进行合成。先进的三维算法可以比较流畅地结合四个独立相机的图像,提供一个无缝和清晰的360°视图。具体来说,四个摄像头的图像被发送到视频处理LSI,包括视频捕捉和3D功能,然后相机图像合成为单个实时3D图像并投影到三维碗形网格,生成虚拟3D环绕视频,可以任意转换车辆周围环境视图视角。
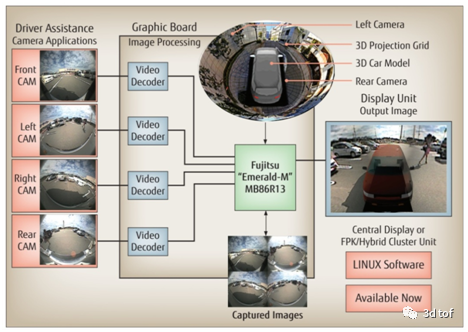 图1. 富士通环视方案流程图
为了满足视频拼接的实时性要求,同时考虑到摄像头安装的位置、角度以及不同摄像头之间相互位置相对固定,在本项目中可以使用基于特定图像拼接与查表法相结合的多视点视频拼接方法。在初始化阶段,首先采集预先放置于车辆前、后、左、右 4个方位的带有棋盘格的标定图像,利用标定图像分别对4个摄像头进行参数标定,求出并保存每个摄像头图像畸变矫正参数,对标定图像进行畸变矫正,消除摄像头成像失真;然后对畸变矫正后的标定图像进行射影变换,求出并保存射影变换参数;接着采集预先放置于车辆前、后、左、右4个方位的带有丰富特征点的特定图像,并通过查找摄像头图像畸变矫正参数进行畸变矫正,通过查找射影变换参数将矫正后的特定图像变换成俯瞰图;最后对4个俯瞰图提取 ORB( Oriented FAST and Rotated BRIEF) 特征并进行粗匹配,利用 RANSAC( Random Sample Consensus,随机抽样一致) 算法剔除误匹配点,并拟合出单应性矩阵的初始值,再使用 Levenberg-Marquardt 非线性迭代最小逼近法进行求精,经图像配准、融合和拼接后,生成360°俯瞰全景视图。在泊车辅助系统启用期间,通过查找已保存的摄像头图像畸变矫正参数、射影变换参数以及单应性矩阵参数,将4个摄像头的视频图像进行拼接,生成虚拟的俯瞰全景视图。
由于摄像头内外参数校正准确性对图像投影效果影响大;需要结合摄像头安装具体情况进行算法的调整;为满足嵌入式系统实时性需求,需要不断优化算法;尽量进行流程简化或者流程自动化。
图1. 富士通环视方案流程图
为了满足视频拼接的实时性要求,同时考虑到摄像头安装的位置、角度以及不同摄像头之间相互位置相对固定,在本项目中可以使用基于特定图像拼接与查表法相结合的多视点视频拼接方法。在初始化阶段,首先采集预先放置于车辆前、后、左、右 4个方位的带有棋盘格的标定图像,利用标定图像分别对4个摄像头进行参数标定,求出并保存每个摄像头图像畸变矫正参数,对标定图像进行畸变矫正,消除摄像头成像失真;然后对畸变矫正后的标定图像进行射影变换,求出并保存射影变换参数;接着采集预先放置于车辆前、后、左、右4个方位的带有丰富特征点的特定图像,并通过查找摄像头图像畸变矫正参数进行畸变矫正,通过查找射影变换参数将矫正后的特定图像变换成俯瞰图;最后对4个俯瞰图提取 ORB( Oriented FAST and Rotated BRIEF) 特征并进行粗匹配,利用 RANSAC( Random Sample Consensus,随机抽样一致) 算法剔除误匹配点,并拟合出单应性矩阵的初始值,再使用 Levenberg-Marquardt 非线性迭代最小逼近法进行求精,经图像配准、融合和拼接后,生成360°俯瞰全景视图。在泊车辅助系统启用期间,通过查找已保存的摄像头图像畸变矫正参数、射影变换参数以及单应性矩阵参数,将4个摄像头的视频图像进行拼接,生成虚拟的俯瞰全景视图。
由于摄像头内外参数校正准确性对图像投影效果影响大;需要结合摄像头安装具体情况进行算法的调整;为满足嵌入式系统实时性需求,需要不断优化算法;尽量进行流程简化或者流程自动化。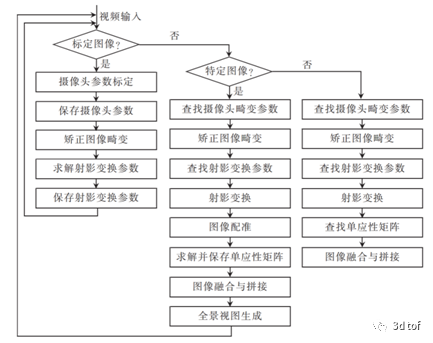 图2. 算法流程
图2. 算法流程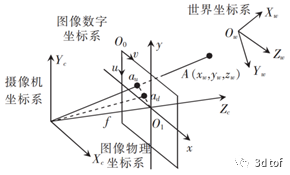 图3. 摄像头成像及其坐标系
主要数学原理,世界坐标系中某点
图3. 摄像头成像及其坐标系
主要数学原理,世界坐标系中某点 投影到图像平面上的像素点( u,v).该过程要经过齐次坐标转换:
投影到图像平面上的像素点( u,v).该过程要经过齐次坐标转换: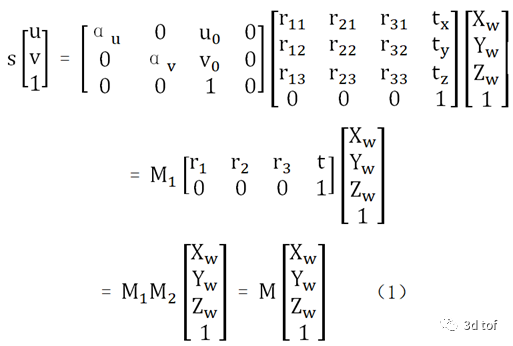 其中,s为任意的非零比例因子;αu=f/dx,f是摄像头的焦距,dx代表x轴方向一个像素的宽度
其中,s为任意的非零比例因子;αu=f/dx,f是摄像头的焦距,dx代表x轴方向一个像素的宽度 是图像在 u 轴上的尺度因子,或称为u轴上的归一化焦距;
是图像在 u 轴上的尺度因子,或称为u轴上的归一化焦距; ,其中dy代表y轴方向一个像素的高度,αv是图像在v轴上的尺度因子,或称为v轴上的归一化焦距;
,其中dy代表y轴方向一个像素的高度,αv是图像在v轴上的尺度因子,或称为v轴上的归一化焦距; ,它们是摄像头坐标系相对于世界坐标系的旋转向量;
,它们是摄像头坐标系相对于世界坐标系的旋转向量;  是摄像头坐标系相对于世界坐标系的平移向量;M1 由
是摄像头坐标系相对于世界坐标系的平移向量;M1 由 决定,只与摄像头内部参数有关,称为摄像头内部参数矩阵;M2 由摄像头相对于世界坐标系的方位决定,称为摄像头外部参数矩阵;M 是一个3×4矩阵,称作投影矩阵,用于计算从世界坐标系到图像坐标系的转换。可见,若已知摄像头的内、外参数,就能够知道投影矩阵 M,对空间内任何一点,如果已知它的空间坐标
决定,只与摄像头内部参数有关,称为摄像头内部参数矩阵;M2 由摄像头相对于世界坐标系的方位决定,称为摄像头外部参数矩阵;M 是一个3×4矩阵,称作投影矩阵,用于计算从世界坐标系到图像坐标系的转换。可见,若已知摄像头的内、外参数,就能够知道投影矩阵 M,对空间内任何一点,如果已知它的空间坐标 ,就可以求出对应的像素点坐标(u,v) 。
,就可以求出对应的像素点坐标(u,v) 。
 张正友标定法,采用棋盘格平面靶标作为标定物,可以把世界坐标系构造在 Zw = 0的平面上。
张正友标定法,采用棋盘格平面靶标作为标定物,可以把世界坐标系构造在 Zw = 0的平面上。
 其中,
其中, 和
和 是径向畸变系数。将式(3)化成矩阵形式为
是径向畸变系数。将式(3)化成矩阵形式为
 以上是畸变矫正公式。
以上是畸变矫正公式。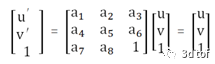 以上是射影变换。
以上是射影变换。
 以上是畸变矫正及射影变换所对应的坐标像素计算公式。
以上是畸变矫正及射影变换所对应的坐标像素计算公式。
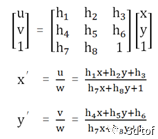 以上是图像拼接单应性矩阵求解公式。
以上是图像拼接单应性矩阵求解公式。
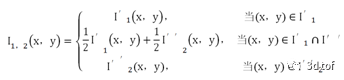 以上是平均值法对拼接重叠区域进行融合。
以上是平均值法对拼接重叠区域进行融合。
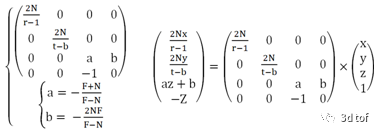 以上是3-D ship模型视角转换矩阵。
以上是3-D ship模型视角转换矩阵。
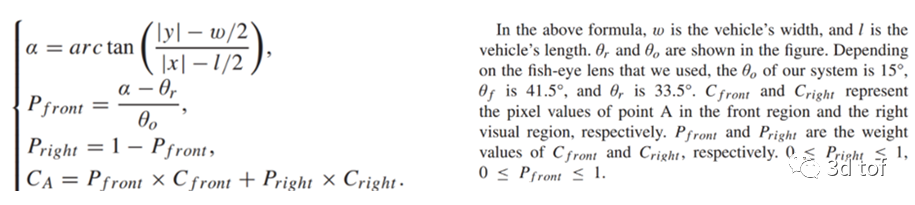
图4. alpha fusion22.3关键技术参数和性能指标 一种基于自适应特征点配准的环视系统拼接效果评估和自动微调方法,其特征在于:包括以下步骤: 步骤A、获得拼接前图像,并截取根据拼接参数算出的拍摄的相同位置的图像; 步骤B、采用自适应特征点配准算法来获得拼接前相同位置的图像的旋转平移矩阵; 步骤C、将旋转平移矩阵或者对其进行计算得到的角度信息和位移信息作为环视系统拼接效果的评估指标,并用此矩阵对拼接效果进行微调。
审核编辑:彭静
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
接口
+关注
关注
33文章
9636浏览量
157815 -
摄像头
+关注
关注
61文章
5133浏览量
103644 -
视频拼接
+关注
关注
0文章
8浏览量
6352
原文标题:ADAS摄像头图像环视拼接算法
文章出处:【微信号:vision263com,微信公众号:新机器视觉】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
轨道交通导热胶长期可靠性要求解析
铬锐特实业|东莞导热胶厂家|解析轨道交通电子设备用导热胶的长期可靠性要求,涵盖严苛环境挑战、关键性能指标及实际验证方法,为轨道交通信号、电源等设备提供稳定散热保障,确保20-30年长寿命运行。

还在手动拼接 AI 代码?你的 IDE 早就该升级了
,还需花费大量时间调试和统一风格,进一步增加了无效工作量。
2、风险隐患:拼接代码影响系统稳定性
工业控制领域对代码的稳定性和安全性要求极高,而手动拼接 AI 代码恰恰埋下了多重风险。
▌ 兼容性风险
发表于 03-11 10:25
迅为电子iTOP-Hi3403嵌入式开发板赋能多目拼接相机解决方案
在智能安防、全景监控、机器视觉等领域,多目图像的无缝拼接与实时处理已成为行业升级的关键挑战。如何在高分辨率、多路视频流中实现流畅、清晰、智能的视觉分析?北京迅为电子精心打造的 iTOP-Hi3403嵌入式开发板,为您带来革命性的

医疗器械三防漆:生物相容性与高可靠性要求 |铬锐特实业
铬锐特实业|探讨医疗器械专用三防漆如何通过ISO 10993生物相容性认证,满足防潮、防腐蚀、耐灭菌等严苛可靠性要求,为可穿戴设备、植入式装置等提供安全可靠防护。

基于米尔RK3576的环视实时性方案解析
如上表数据所示,当所有处理任务均由CPU承担时,总耗时高达170ms,远超40ms的预算。其中,计算密集型的图像拼接成为绝对的性能瓶颈,几乎占满了所有A72大核的资源。这不仅导致系统无法实时处理视频流
发表于 11-28 16:57
技术分享 | RK3588增加Xenomai3实时补丁
Xenomai是一套为嵌入式系统设计的实时开发框架,通过“双内核”架构,让Linux既能处理复杂的通用任务,又能可靠地完成那些对响应时间有极端要求的任务,广泛用于工业自动化、机器人、航空航天等对实时

C语言宏拼接运算符典型使用
在C语言中,##运算符(称为[size=16.002px]标记拼接运算符)用于宏定义中将两个标记(token)拼接成一个新的标记。它在预处理阶段处理,常用于动态生成变量名、函数名或类型名,以提高代码
发表于 11-20 08:27
【玩转多核异构】T153核心板RISC-V核的实时性应用解析
飞凌嵌入式FET153-S核心板的异构多核架构展现出了卓越的通信性能,能够为诸多应用提供高效可靠的核心支撑,特别适用于对实时性和稳定性要求极高的智能应用场景。
硬件融合拼接器与软件融合拼接的区别?
硬件融合拼接器和软件融合拼接是两种不同的图像拼接技术,它们在实现方式、效果和应用场景等方面存在一些区别。 1、实现方式 硬件融合拼接器通常是通过硬件设备来实现图像的
云拼接处理器的性能如何?
云拼接处理器作为大屏拼接及音视频解决方案中的关键设备,其性能直接影响着展览展示、可视化展厅、中小控制室和园区监控等行业的视觉呈现效果与系统运行稳定性。深圳融大视觉科技有限公司推出的云拼接
RK3576助力智慧安防:8路高清采集与AI识别
在智慧城市和数字化园区的建设过程中,安防监控系统正从“被动记录”走向“主动识别与分析”。随着AI算法的成熟和高清视频处理能力的提升,市场对多路视频采集、实时拼接、智能识别的需求日益增强
发表于 08-22 17:41
OBOO鸥柏丨拼接大屏LCD拼接LED液晶单元墙招标投标核心标底参数要求
整机参数要求:46寸/49寸/55寸/65寸/75寸/85-86寸超窄边液晶拼接屏/LCD高清拼接墙单元招标投标核心标底参数要求1、整机屏幕采用≥采用超高清原厂原包原装工业LCD液晶屏

一文读懂:嵌入式Linux实时性进阶
在工业控制、机器人、汽车电子等关键领域,嵌入式系统对实时性要求极高。
Linux作为强大的通用操作系统,其原生实时性能难以满足最严苛的硬实时需求。为突破这一限制,PREEMPT_R
发表于 07-10 15:26
AKOOL发布全球首款实时摄像头
近日,硅谷新锐公司AKOOL发布全球首款实时摄像头Akool Live Camera,集虚拟数字人、AI视频翻译、实时换脸、实时AI视频生成
全自动拼接影像测量仪适合测大视野产品同时保障精度
5mm(选配)。
全自动拼接影像测量仪在使用过程中可能会遇到以下问题:
投影屏幕故障:
旋转过程中产生异响:清理端面上的杂质(如锈斑),更换定位轴承。
旋转时摩擦力过大:松开锁紧螺钉或调整摩擦旋转方式
发表于 05-26 10:29



评论