 rt-thread 驱动篇(二) serialX 理论实现
rt-thread 驱动篇(二) serialX 理论实现

前言
“serialX” 我起的名字,起个名字想破头。
在前一篇文章里,大致提出了我的串口驱动框架理论。里面做了一些对串口驱动特性的幻想。也在 NUC970 芯片下通过了中断模式的实践验证。但是,因为 NUC970 的 uart 自带 fifo 。用它测试效果好,并不能真正说明驱动框架通过验证了。
然后,紧接着笔者在 STM32F429 完成了中断和 DMA 两种模式。今天,我把一些测试结果和移植说明发出来,征求全网公测。
测试配置:DMA 二级缓存 32 个字节,串口收发缓存各 512 字节。
注:本串口驱动工作特性请参阅前一篇文章rt-thread 驱动篇(一) serialX 框架理论
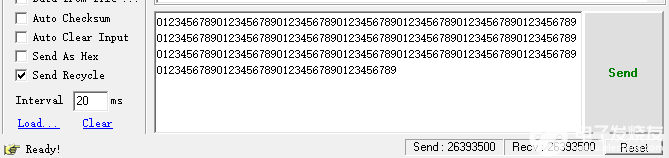
STM32 中断模式测试
以下是三组连续发收测试:
1. 定时间隔20ms,发送250字节数据,持续发送2600w,接收发送数据量相等
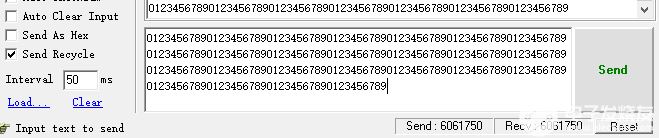
2. 定时间隔50ms,发送250字节数据,持续发送600w,接收发送数据量相等
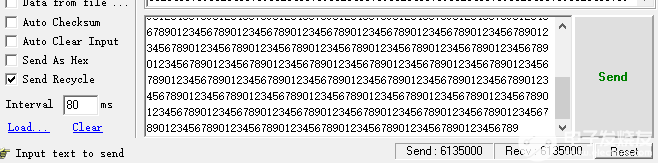
3. 定时间隔80ms,发送1000字节数据,持续发送600w,接收发送数据量相等
注:刚刚跟我们小伙伴求证了一下,串口调试助手的定时间隔是固定周期。如果是这样的,以上测试是有意义的,如果不是,那就没达到串口带宽上限。
STM32 DMA模式测试
1. 读写测试,串口调试助手定时 10ms ,发送40字节数据,持续发送129w

2. 串口调试助手定时 50ms ,发送500字节数据,持续发送527w

3. 串口调试助手定时 40ms ,发送500字节数据,持续发送261w

4. 串口调试助手定时 40ms ,发送1000字节数据,持续发送262w

串口调试助手上发送和接收数量不相等,接着我在代码中添加了个断点,单独发送了一个字节 ‘Z’ 。

代码中接收和发送数量相等,都等于串口调试助手的接收量。这个缺少的部分是串口调试助手发送失败数量,还是串口驱动接收丢失了?
接下来,修改成中断接收发送模式,其它不做修改进行相同的测试,也是有数量差。进一步检查串口驱动里,接收缓存有溢出现象。应用层没来得及把数据取走,就删掉了最旧的数据。
接口详解及移植说明
rtdef.h 添加几个宏定义
添加阻塞打开相关标志
#define RT_DEVICE_OFLAG_BLOCKING 0x000 /**< blocking io mode */
#define RT_DEVICE_OFLAG_NONBLOCKING 0x004 /**< non-blocking io mode */
...
#define RT_DEVICE_CTRL_BLOCKING 0x05 /**< blocking io */
serialX.h
添加串口驱动缓存和 DMA 二级缓存大小定义(放弃使用 `RT_SERIAL_RB_BUFSZ`):
#ifndef RT_SERIAL_FIFO_BUFSZ
#define RT_SERIAL_FIFO_BUFSZ 512
#endif
#ifndef RT_SERIAL_DMA_BUFSZ
#define RT_SERIAL_DMA_BUFSZ 32
#endif
串口接收和发送使用的缓存大小是一样的,如果想改变串口缓存大小,请修改 `RT_SERIAL_FIFO_BUFSZ` 的值。
如果想改变 DMA 二级缓存大小,请修改 `RT_SERIAL_DMA_BUFSZ` 的值。
定义一个收发通用 fifo:
struct rt_serial_fifo
{
rt_uint32_t buf_sz;
/* software fifo */
rt_uint8_t *buffer;
rt_uint16_t put_index, get_index;
rt_bool_t is_full;
};
重新定义 `rt_serial_device` 定义:
struct rt_serial_device
{
struct rt_device parent;
const struct rt_uart_ops *ops;
struct serial_configure config;
void *serial_rx; // 串口接收缓存
void *serial_tx; // 串口发送缓存
#ifdef RT_SERIAL_USING_DMA // 串口收发缓存和 DMA 使用的二级缓存分开
rt_size_t dma_idx_rx;
rt_uint8_t serial_dma_rx[RT_SERIAL_DMA_BUFSZ]; // DMA 接收缓存
rt_uint8_t serial_dma_tx[RT_SERIAL_DMA_BUFSZ]; // DMA 发送缓存
#endif
cb_serial_tx _cb_tx; // 写过程回调函数指针
cb_serial_rx _cb_rx; // 读过程回调函数指针
struct rt_completion completion_tx; // 发送完成
struct rt_completion completion_rx; // 接收到新数据
};
typedef struct rt_serial_device rt_serial_t;
串口驱动通用框架和硬件底层接口定义
struct rt_uart_ops
{
// 用于配置外设寄存器,引脚功能复用,启用外设等等
rt_err_t (*configure)(struct rt_serial_device *serial, struct serial_configure *cfg);
// 用于使能禁用中断,初始配置 DMA
rt_err_t (*control)(struct rt_serial_device *serial, int cmd, void *arg);
// 串口外设写数据寄存器*为空*,把数据放入写数据寄存器。*不为空*,死等
int (*putc)(struct rt_serial_device *serial, char c);
// 串口外设读数据寄存器*不为空*,读出读数据寄存器的值。*为空*,返回 -1
int (*getc)(struct rt_serial_device *serial);
// 启动发送,多数是开启串口外设发送寄存器空中断
void (*start_tx)(struct rt_serial_device *serial);
// 结束发送,多数是关闭串口外设发送寄存器空中断
void (*stop_tx)(struct rt_serial_device *serial);
#ifdef RT_SERIAL_USING_DMA
// 判断 DMA 是否在发送过程中,就像上一篇里笔者多次提示的,必须有效检测 DMA 是否在发送数据中
rt_bool_t (*is_dma_txing)(struct rt_serial_device *serial);
// 启动 DMA 发送
void (*start_dma_tx)(struct rt_serial_device *serial, rt_uint8_t *buf, rt_size_t size);
// 停止 DMA 发送
void (*stop_dma_tx)(struct rt_serial_device *serial);
#endif
// 使能串口外设中断
void (*enable_interrupt)(struct rt_serial_device *serial);
// 禁用串口外设中断
void (*disable_interrupt)(struct rt_serial_device *serial);
};
移植 serialX 到新芯片上,必须按照 `rt_uart_ops` 的定义实现上述几个接口。函数功能不能随意更改。
`rt_hw_serial_isr`
这个中断只接收 `RT_SERIAL_EVENT_RX_IND` `RT_SERIAL_EVENT_RX_IND` `RT_SERIAL_EVENT_RX_DMADONE` `RT_SERIAL_EVENT_TX_DMADONE` 四种中断状态。
- `RT_SERIAL_EVENT_RX_IND` 接收寄存器不空中断
- `RT_SERIAL_EVENT_TX_DONE` 发送寄存器空中断,为了兼容自带 fifo 的芯片,event 参数的高三字节代表 fifo 容量
- `RT_SERIAL_EVENT_RX_DMADONE` 串口接收 DMA 中断。 这个可以兼容接收半传输和全传输等多种中断。event 参数的高三字节代表 DMA fifo 接收数据数量(1-RT_SERIAL_DMA_BUFSZ)。
- `RT_SERIAL_EVENT_TX_DMADONE` 串口发送 DMA 中断。这个应该保证 DMA 发送完本次 DMA 缓存中的所有数据,也就是对于 stm32 芯片是 DMA 计数达到 0。
使用注意
- `RT_SERIAL_FIFO_BUFSZ` `RT_SERIAL_DMA_BUFSZ` 两个的定义和实际是否合适,小数据量通信可以定义小点儿,数据量大的情况适当调整这两个值。
- `rt_uart_ops` 接口定义,功能实现必须匹配。
- 阻塞模式,收发是一致的。默认是阻塞模式。想使用非阻塞模式请 open 的时候添加 `RT_DEVICE_OFLAG_NONBLOCKING` flag。
- 使用 `RT_DEVICE_FLAG_INT` `RT_DEVICE_FLAG_DMA_RX` `RT_DEVICE_FLAG_INT_TX` `RT_DEVICE_FLAG_DMA_TX` 四个 open flag 指定收发模式,是用中断还是 DMA。
- **特别提醒**,非阻塞模式下,read 可能返回 0。write 返回值可能不是目标写入 size。read/write 还可能返回 `RT_EXXX` 错误值。
- **特别提醒**,阻塞模式下,read 返回值可能不是期望数据量 size。笔者也曾经提供过可靠处理流数据的方案,详见 rt-thread 使用宝典(2022-0516更新)
使用完成量进入阻塞漏洞分析
> PS: 谢谢 @HelloBye 的及时纠正,`rt_completion` 不存在本小节描述的漏洞。各位看官可以直接跳过本小节了。
串口驱动里有几个阻塞点,进入阻塞都使用的 `rt_completion` ,如下代码:
serial->ops->enable_interrupt(serial);
ret = rt_completion_wait(&(serial->completion_rx), RT_WAITING_FOREVER);// 或者 serial->completion_tx
首先开中断,调用 `rt_completion_wait` 等待完成量进入阻塞。这样是有个漏洞的,当开中断后有个串口中断,中断处理函数里调用 `rt_completion_done` 是没有任何反应的,`rt_completion_done` 直接返回退出。
进而回到原线程才执行 `rt_completion_wait`。之后,如果有第二次接收(或发送)中断发生时才会结束上一次的阻塞。但是,第二次什么时候出现也就是个未知数了。即便前一次可能已经收全了全部想要的数据,但是会不定期阻塞下去。
解决方法有两个:一、不用永久阻塞,换成 10ms 或者几 ms 等待;二、用二值信号量替代。
但是!!!我没有用上述方法中的任何一个进行改进,原因是:
第一种方法无疑要引入一个循环,`rt_completion_wait` 超时返回的时候循环继续阻塞。还有就是等待时间没有理论支持。最重要的是用循环方式补漏洞的方式不美观。
没使用二值信号量的原因是,rt-thread 的信号量实现没有真正的“二值”,如果中断已经多次 release 了,然后应用层才来一次 take,之后还可能成功 take 多次(虽然应该是要阻塞的,但是实际不阻塞,反而会循环 take 多次)。
结束语
现笔者将打码开放出来 gitee 仓库 [serialX]( https://gitee.com/thewon/serialX ),求全论坛公测。期待各位大佬提出各种测试方案对它蹂躏。
有问题可以在仓库里提 [issue]( https://gitee.com/thewon/serialX/issues ) ,或者到 rt-thread 官方论坛上进行讨论。
审核编辑:汤梓红
-
STM32
+关注
关注
2313文章
11195浏览量
374667 -
中断
+关注
关注
5文章
920浏览量
43875 -
串口驱动
+关注
关注
2文章
86浏览量
19472 -
RT-Thread
+关注
关注
32文章
1640浏览量
45210
发布评论请先 登录
RT-Thread记录(一、版本开发环境及配合CubeMX)

RT-Thread记录(二、RT-Thread内核启动流程)
rt-thread 驱动篇(六)serialX弊端及解决方法
RT-Thread NUC97x 移植 LVGL
RT-Thread编程指南
RT-Thread Studio驱动SD卡

RT-Thread全球技术大会:RT-Thread对POSIX的实现情况介绍
rt-thread 驱动篇(四)serialX 多架构适配
RT-Thread学习笔记 RT-Thread的架构概述

《RT-Thread设备驱动开发指南》基础篇--以先楫bsp的hwtimer设备为例




评论