 LiDAR如何为自动驾驶汽车提供关键距离感应
LiDAR如何为自动驾驶汽车提供关键距离感应

如果您正在设计自动驾驶汽车应用,您就会知道 LiDAR(光检测和测距)的重要性。LiDAR 是一种执行自动驾驶汽车距离感应的关键光学技术,是高级驾驶辅助系统 (ADAS) 的重要组成部分,也是自动驾驶汽车的重要组成部分。其性能取决于光前端,以及信号如何通过信号链传输然后进行处理。该信号链中的一个重要组件是跨阻放大器 (TIA)。在这篇博文中,我将概述LiDAR的工作原理,并讨论在有效的 TIA 中寻找什么。
在激光雷达应用中,激光纳秒脉冲突发从光源发出并从视野中的物体反射。检测到反射光,飞行时间 (ToF) 会创建视图中对象的距离图(图 1)。
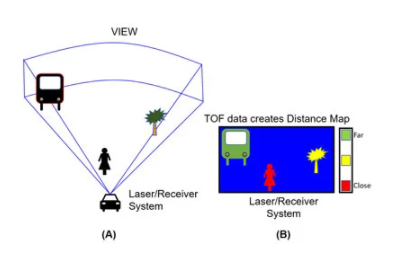
图 1. 汽车激光/接收器系统 (A) 的视图以饼形角度捕获物品。ToF 数据测量 (B) 物体与激光/接收器系统的距离。
在图 1 中,来自汽车激光器 (A) 的纳秒脉冲信号突发将光线发送到视图中的目标区域。一旦激光信号爆发击中物体,光线就会返回汽车。车辆中的电子设备使用 ToF 数据标记捕获返回的信号。ToF 的度量是返回到激光/接收器系统位置的往返时间。为了收集完整的 ToF 数据,激光/接收器系统跨越视图。
ToF 数据创建距离图 (B),提供物体与激光/接收器系统的距离。在图 1.B 中,较小的距离数据值表示较近的项目,较大的距离数据值表示较远的项目。根据激光/接收器 ToF 数据 (B),红色人物(女性)是最近的,其次是黄色物体(树),最后是远处的绿色物体(城市公交车)。视图中的区域不断地来回扫描,以获得完整和持续的覆盖。
了解激光/接收器系统电子设备
激光/接收器系统由多个光电二极管、一个激光二极管和支持电子设备组成,用于传输和接收光信号(图 2)。
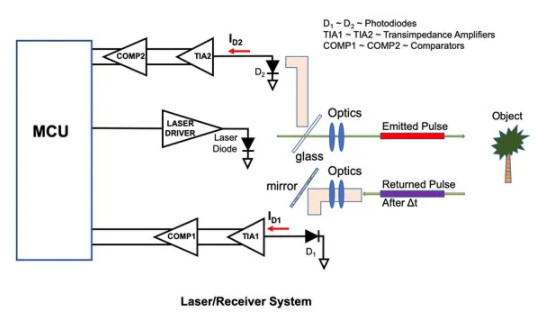
图 2. 激光/接收器系统通过视图传输光,以通过激光反射找到物体。
在图 2 中,激光驱动器向物体发起激光脉冲传输,并通过 D 2、TIA2 和 COMP2 向微控制器 (MCU) 反馈一帧时间参考信号。激光传播到玻璃板,玻璃板将激光信号反射到 MCU 并通过发射器光学元件(指定的透镜)。
发射的脉冲到达物体并反射到激光/接收器系统。一旦通过接收器光学器件和镜面反射,光线就会照射在 InGaAs 光电二极管 (D 1 ) 上。InGaAs光电二极管是一种高灵敏度半导体电子器件,其光灵敏度带宽为1310nm至1550nm。
D 1上的光线可能很亮,也可能很暗,具体取决于行进的距离。此外,大气中可能存在污染物,并且为了混淆系统,可能存在干扰幻象灯。D 1将光转换为电流 (I D1 ),电流流向跨阻放大器#1 (TIA1) 和比较器#1 (COMP1)。
光电二极管所见背后的大脑
TIA1 和 COMP1 是光电二极管所见的大脑。TIA1 的频率带宽保持了返回脉冲上升和下降时间的完整性,并允许采集更多像素。TIA1 还可以安全地承受大的瞬态输入过载电流并迅速恢复。
低本底噪声捕捉对象的细节,为后面的比较器产生准确的输出。动态范围的进一步增强包括可编程增益功能。此外,由于 LiDAR 系统的光学前端消耗大量功率,因此将 TIA1 和 TIA2 置于低功率模式可能是有利的。图 3中的 TIA 设计专门应对这些挑战。
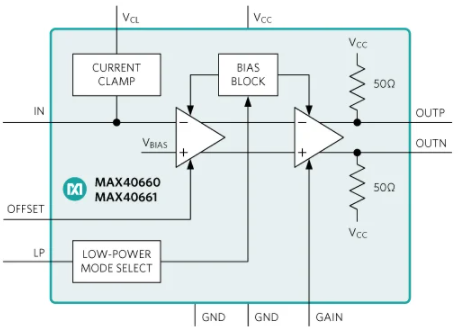
图 3. 用于汽车 LiDAR 系统的 MAX40660/MAX40661 跨阻放大器。
MAX40661和MAX40660 _跨阻放大器分别提供 160MHz 和 490MHz 的高带宽。这些器件通过放大高速纳秒输入电流脉冲来提供高分辨率。2.1pA√Hz 的噪声密度可提供更高的系统精度和更长距离的操作。动态范围调整使用 25kΩ 和 50kΩ 两个引脚可选跨阻值,无需额外的放大级来匹配具有不同寄生电容的不同光电二极管。这些器件可在 10ns 内稳健地承受高达 2A 的输入电流,并具有 2ns 的快速过载电流恢复时间。不使用时,低功耗模式仅消耗 26mW 的功率。这些 IC 符合 AEC-Q100 标准,它们的 FMEDA 结果可用于辅助系统级别的 ASIL 合规性计算。它们有 3mm x 3mm、
这些电路中的比较器 COMP1 和 COMP2 将 TIA 的模拟输出更改为干净的数字信号(图 4)。
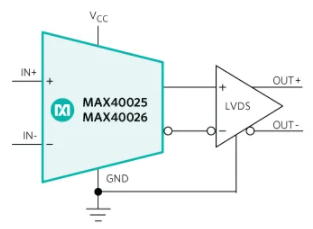
图 4. 用于汽车 LiDAR 系统的 MAX40025/MAX40026 跨阻放大器。
MAX40025封装采用1.218mm x 0.818mm、6 凸点晶圆级封装 (WLP),而MAX40026采用 2mm x 2mm 8 引脚 TDFN 侧面可湿性封装,符合 AEC-Q100 汽车认证要求。
概括
自动驾驶汽车的商业化代表着一段激动人心的旅程,ADAS 中的 LiDAR 技术有望成为自动驾驶汽车未来的重要参与者。通过关注光学前端的操作,本博客研究了接收器信号链的电子元件如何在系统性能中发挥重要作用。此处重点介绍的 LiDAR 就绪 TIA 和比较器提供了 LiDAR 应用所需的前所未有的系统精度水平。
审核编辑:郭婷
-
放大器
+关注
关注
146文章
14376浏览量
222810 -
接收器
+关注
关注
15文章
2657浏览量
77715 -
adas
+关注
关注
311文章
2362浏览量
212265
发布评论请先 登录
自动驾驶汽车如何完成超车?

自动驾驶汽车如何实现自动驾驶

2026年自动驾驶汽车发展趋势前瞻

如何为自动驾驶汽车选择一款合适的激光雷达?

汽车自动驾驶的太阳光模拟应用研究

LiDAR线圈如何驱动无人驾驶技术
自动驾驶汽车如何确定自己的位置和所在车道?

超声波传感器线圈:自动驾驶实现精确实时近距离感知的关键
如何确保自动驾驶汽车感知的准确性?

塑造自动驾驶汽车格局的核心技术
太阳光模拟器 | 在汽车自动驾驶开发中的应用
自动驾驶汽车在隧道、山区如何精准定位?

自动驾驶汽车如何正确进行道路识别?

自动驾驶汽车是如何准确定位的?




评论