 “几片玻璃”就能随意控制光的方向?新技术加速固态激光雷达落地
“几片玻璃”就能随意控制光的方向?新技术加速固态激光雷达落地

电子发烧友网报道(文/梁浩斌)去年开始,激光雷达开始大规模登上智能汽车,但也可以发现,市面上的激光雷达基本是都是混合固态方案,而普遍被认为是激光雷达主流发展方向的全固态直到现在依然没有能够大规模量产的产品。
不过最近固态激光雷达厂商们也有一些新进展,就在上周,激光雷达供应商Quanergy宣布,其OPA(光学相控阵)技术的激光雷达已经成功实现250米的探测距离。去年8月,Quanergy曾成功展示了业界首款基于OPA的固态激光雷达,覆盖范围为100米;今年1月,Quanergy将这个范围提升至200米。
OPA的原理,是通过多个同相和振幅完全可控的单元组成的阵列,通过改变不同单元的电压,改变每个单元的发光特性以及振幅,可以实现改变光束相位轮廓来改变光束的角度。这意味着OPA不需要任何可移动部件,就能实现较大视场角的范围扫描,以及更高的分辨率。
这里需要提一下,目前全固态激光雷达主要有三种技术路线,OPA、FMCW、Flash,其中OPA以及Flash赛道上玩家相对较多,所以理论上更有可能成为未来主流。而刚刚提到OPA的优势,比如视场角、分辨率等,正是另一种技术路线Flash激光雷达的劣势。
Flash激光雷达的成像原理是,发射大面积激光一次性照亮整个场景,再利用多个传感器去接收探测反射光。但最大的问题是,这样的工作模式需要非常高的激光功率,而在体积限制之下,Flash激光雷达的功率密度并不能做到很高。所以Flash激光雷达目前的问题在于,受到功率密度限制,导致视场角、探测距离、分辨率三个参数无法兼顾,即如果要探测距离远,就要牺牲视场角或分辨率;如果需要高分辨率,就要牺牲视场角或探测距离。
不过最近固态激光雷达厂商们也有一些新进展,就在上周,激光雷达供应商Quanergy宣布,其OPA(光学相控阵)技术的激光雷达已经成功实现250米的探测距离。去年8月,Quanergy曾成功展示了业界首款基于OPA的固态激光雷达,覆盖范围为100米;今年1月,Quanergy将这个范围提升至200米。
OPA的原理,是通过多个同相和振幅完全可控的单元组成的阵列,通过改变不同单元的电压,改变每个单元的发光特性以及振幅,可以实现改变光束相位轮廓来改变光束的角度。这意味着OPA不需要任何可移动部件,就能实现较大视场角的范围扫描,以及更高的分辨率。
这里需要提一下,目前全固态激光雷达主要有三种技术路线,OPA、FMCW、Flash,其中OPA以及Flash赛道上玩家相对较多,所以理论上更有可能成为未来主流。而刚刚提到OPA的优势,比如视场角、分辨率等,正是另一种技术路线Flash激光雷达的劣势。
Flash激光雷达的成像原理是,发射大面积激光一次性照亮整个场景,再利用多个传感器去接收探测反射光。但最大的问题是,这样的工作模式需要非常高的激光功率,而在体积限制之下,Flash激光雷达的功率密度并不能做到很高。所以Flash激光雷达目前的问题在于,受到功率密度限制,导致视场角、探测距离、分辨率三个参数无法兼顾,即如果要探测距离远,就要牺牲视场角或分辨率;如果需要高分辨率,就要牺牲视场角或探测距离。

图源:LeddarTech官网
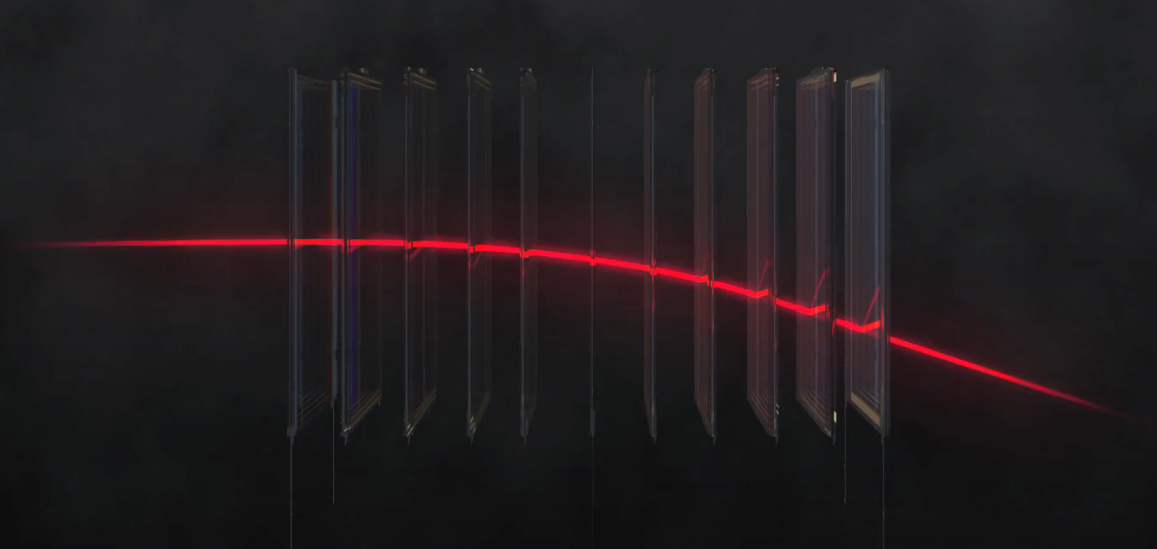
那么在功率密度限制下,如何提升激光雷达性能?最近自动驾驶传感技术供应商LeddarTech就推出了一个被称为LeddarSteer的固态数字光束转向解决方案。这个解决方案目的是控制激光雷达中激光脉冲的方向,也就说不需要一个可活动的模块,比如MEMS等,就能完成对光线方向的改变,以扩大视场角。
图源:LeddarTech官网
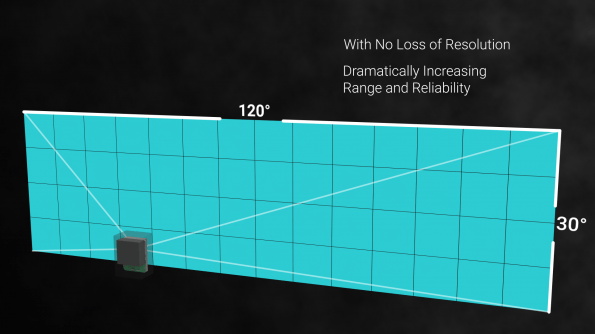
LeddarSteer是一种基于液晶和偏振光栅的数字光束控制技术,能够快速、准确、可靠地将光线控制在所需的角度。而光束控制铜鼓将视场划分称多个小的部分,并将激光雷达的发射器或接收器重新定向到这些小的部分中,以此增强激光雷达的性能,包括实现高达120°x60°的宽视场。
图源:LeddarTech官网
在采用了这种方案后,可以明显降低激光雷达本身的设计难度,包括降低光学设计难度、降低了激光雷达组件的尺寸和成本。同时兼容多种激光雷达结构,使得这种方案有着更高的适用性。
而这种方案会不会加速全固态激光雷达实现量产的进度?毕竟在上周,走Flash路线的Ouster才宣布成功交付第一台全固态数字激光雷达的A样,至于量产,计划要到2025年才能实现。
在文章开始时提到的Quanergy,早在2017年就已经表示下线OPA激光雷达,但目前仅有部分用于工业等领域,汽车端的应用依然未见落地。曾计划在2020年量产的Fisker,本应搭载QuanergyS3,但由于Fisker本身跳票,如今的量产计划已经延后到2024年。
如今看来,全固态激光雷达就类似于一些电动新势力车企,雷声大雨点小,产品迟迟未能量产。不过,看回激光雷达在汽车上的使用历史,最早从2018由奥迪引进到旗下A8车型上,而大规模应用,也仅仅是去年9月才开始。
按照技术路线的迭代,全固态激光雷达从进度上看,基本上都还处于车企导入的状态,首先验证需要一段很长的时间、另外量产一致性和成本等还需要优化。所以目前主流的包括转镜、MEMS等激光雷达至少还会有三到四年的市场发展空间。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
光学
+关注
关注
4文章
833浏览量
37890 -
激光雷达
+关注
关注
978文章
4378浏览量
195382 -
固态激光雷达
+关注
关注
0文章
47浏览量
6586
发布评论请先 登录
相关推荐
热点推荐
中科亿海微SoM模组——激光雷达控制板
激光雷达作为一种高精度、高性能的传感技术,广泛应用于自动驾驶、机器人导航、工业自动化、无人机等应用领域。激光雷达控制板可以很好的满足这些领域中对于精准

扫描、测距新方案亮相,固态激光雷达再进一步
电子发烧友网报道(文/梁浩斌)在上周的CIOE光博会上,最火爆的毫无疑问是光通信和AR眼镜,激光雷达领域也有不少亮眼的新品和新技术展出。 阜时科技:全固态
发表于 09-19 18:17
•4834次阅读
全固态激光雷达为什么迟迟未来?其技术难点是什么?
[首发于智驾最前沿微信公众号]激光雷达(LiDAR)作为自动驾驶车辆环境感知的“第三只眼”,能够发射激光脉冲并接收反射光,实时构建周围物体的三维点云,从而为车辆决策提供精准的距离和形状信息。与摄像头
FMCW激光雷达,加速落地工业场景
电子发烧友网综合报道 FMCW激光雷达虽然在车载领域还未实现量产应用,但实际上在工业等领域,比如单点测距场景中已经实现落地。近期激光雷达厂商摩尔芯光正式发布全球首款FMCW球形
机械、半固态、全固态激光雷达有何区别?谁更适合自动驾驶?
[首发于智驾最前沿微信公众号]激光雷达(LiDAR)作为自动驾驶车辆感知环境的核心传感器之一,通过激光脉冲实时获取周围物体的三维位置信息,从而为车辆决策和控制提供精准的环境建模。根据扫描方式和结构

自动驾驶激光雷达:原理、类型与应用梳理
来探测物体。白天或黑夜下的物体与车之间的距离。甚至由于反射度的不同,车道线和路面也可以区分。光束无法探测到被遮挡的物体。 2.激光雷达的关键参数 点频:每帧水平方向平均点数x垂直方向平均点数x帧率=(水平视场角/水平角分辨率)×

激光雷达技术在自动驾驶汽车中的应用
在不断发展的汽车技术领域,LiDAR(光探测和测距)传感器——也就是“激光雷达”——已成为关键组件,随着汽车行业向自主化迈进,激光雷达传感器在提供安全导航所需的实时3D地图方面发挥着关

激光雷达技术:自动驾驶的应用与发展趋势
随着近些年科技不断地创新,自动驾驶技术正逐渐从概念走向现实,成为汽车行业的重要发展方向。在众多传感器技术中,激光雷达(LiDAR)因其独特的优势,被认为是实现高级自动驾驶功能的关键。

DeepSeek:2025年激光雷达技术与行业应用趋势
智能化,加速突破瓶颈1.固态化与芯片化主导技术迭代固态激光雷达(Solid-StateLiDAR):2025年,机械旋转式


禾赛拒绝“激光雷达无用论”
1440线激光雷达AT1440和车规级纯固态激光雷达FTX以及面向机器人的JT系列。 李一帆指出,目前行业对机器人的定义尚无共识,但激光雷达在该领域的渗透率增长迅速。2024年12月单

激光雷达进化史:从机械式到全固态
激光雷达是集激光、全球定位系统(GPS)、和IMU(惯性测量装置)三种技术于一身的系统,相比普通雷达,激光雷达具有分辨率高,隐蔽性好、抗干扰
一则消息引爆激光雷达行业!特斯拉竟然在自研激光雷达?
电子发烧友网报道(文/梁浩斌)一则消息引爆激光雷达行业?上周业界流传的一份会议纪要称,有自动驾驶专家透露,特斯拉已经设计了自己的激光雷达,并正在与大陆集团合作,将自己开发的激光雷达技术
激光雷达,明年要降价至200美元
电子发烧友网报道(文/梁浩斌)激光雷达降本的速度,在进入大规模量产之后开始不断加速。从2021年激光雷达刚刚大规模上车,单个激光雷达1000美元;到2023年,






 工商网监
工商网监
评论