 移动机器人激光雷达感应模块的模拟前端设计
移动机器人激光雷达感应模块的模拟前端设计

电子发烧友网报道(文/李宁远)仅设计的角度来看,我们可以将移动机器人分为CPU板和感应模块两大设计类别。雷达、激光雷达或超声波接近应用的感应模块等等都在移动机器人上有着广泛的应用。移动机器人感应模块通常需要有如下几个特点,一是需要具有集成或分立数字转换器的高速信号链,二是需要具备快速功率脉冲能力,这主要是针对一些需要主动照明的传感器,三则是感应模块与计算模块之间能够实现高速低延迟通信。
以移动机器人中最主流的激光雷达为例,在其感应模块的设计上,一般分为模拟前端、数字处理、非隔离DC/DC电源、有线接口、自我诊断/监测以及信号输入/输出保护这几个部分。这里我们主要关注模拟前端设计,看看在移动机器人激光雷达感应模块里如何设计一个性能优异的模拟前端。
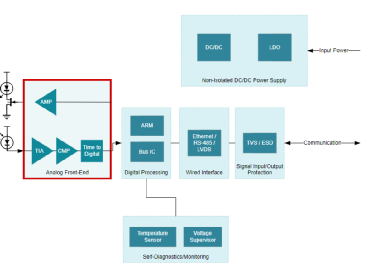
(移动机器人系统设计,TI)
激光雷达感应模块中放大器如何选择?
激光雷达感应模块首选的放大器肯定是高速运算放大器(GBW>=50MHz)这一类。对于高速运算放大器,我们考虑的肯定其带宽、噪声、精度。当然小尺寸以及合适的电压也是必需的。在基于TDC的激光雷达系统中,可以使用双极输入的宽带低噪声运算放大器配置为跨阻放大器(TIA),增益带宽积(GBWP)能够以高达几十千欧的跨阻增益实现高闭环带宽。这种系统需要高速运放有较低的噪声,小于2.5nV/Hz的噪声内是很有必要的。更为常见的应该是基于ADC的ToF激光雷达系统,系统采用高速模数转换器将反射波形转换为可进行处理和分析的数字信号,然后使用DSP或者FPGA处理通过ADC接收的波形信息。这类系统同样需要TIA,跨阻增益的灵活配置能够让系统设计更加灵活,另外为了光电二极管和TIA之间连接更高效,可以选择裸片选项(如果高速运算放大器可以提供裸片)来进一步缩小设计尺寸。
另外,基于ADC的系统使用全差分放大器来驱动高速ADC的时候,全差分放大器的增益带宽、转换率、噪声、偏移漂移也是需要注意的。
激光雷达感应模块中数据转换器如何选择?
模数转换器是很多性能优异器件都离不开的组件,在激光雷达系统中,模数转换器更是重中之重,尤其是高速模数转换器。激光雷达感应模块通常会选取>10MSPS的高速ADC。基于高速ADC的测距应用,能实现更精准的识别、更宽松的采样率以及更简化的信号链。
激光雷达感应模块的高输入频率信号往往具有宽动态范围需求并且要求苛刻。从这个方向上去选取高速ADC是肯定不会错的。双通道是最普遍的(也不是一定)应该不需要过多纠结,分辨率在14位也比较常见的选择。信噪比SNR,无杂散动态范围SFDR这种关键的指标肯定是选择时大家都会非常关注的,这直接影响到移动机器人的感知水准。
支持多种分频的灵活输入时钟缓冲器是对于ADC自身来说是很有用的,这样时钟输入分频器将给予系统时钟架构设计更高的灵活性。另外,如果ADC支持串行低压差分信令LVDS,那更是锦上添花。支持串行低压差分信令意味着可以大大减少接口线路的数量,实现更高的系统集成度。功耗肯定是不能遗漏的一点,在ADC性能差不多的情况下,更低功耗的器件更受青睐,以目前在移动机器人激光雷达模块中较为常见的14位ADC为例,每个通道的功耗(最大采样速率125MSPS时)最低现在可以做到110mW左右,比这稍微高一些的功耗都是很不错的。
激光雷达感应模块中温度传感如何选择?
这里涉及模拟温度传感和数字温度传感。模拟温度传感要尽可能实现与温度成比例的高线性输出电压或电流,与此同时还要尽可能减少自发热。精度上的要求自是不必多说,肯定是越高越好,最好能够不需要补偿电路或校准不然使用起来还是有些麻烦。在室温下,整个传感IC能提供<±3℃的精度是最好的,在整个工作温度范围的精度可以稍稍一些,一般来说移动机器人也不太会有在极端温度下工作的场景。自发热是限制得越低越好,目前领先的模拟温度传感IC能控制在0.2℃。
数字温度传感可以通过编程以几种不同分辨率中的任意一种报告温度从而优化传感器转换时间和灵敏度,这个优势可以利用起来。如果是在通电后很快需要温度数据,可以选择测量时间快的数字温度传感,快到十几毫秒内就能读取温度。而且数字温度传感经过优化可以感知非常小的温度变化,如何选择就看具体需求了。
小结
这里选取了一些常见的用于配置移动机器人激光雷达感应模块的器件,在器件的选择上给出了一些方向和考虑角度。具体的设计过程还是要针对整个系统做全局的考量,不管器件如何选型,高速信号链以及高速低延迟通信一直都是最为重要的。
原文标题:机器人激光雷达模块中器件如何选择?
文章出处:【微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
审核编辑:汤梓红
-
模块
+关注
关注
7文章
2848浏览量
53429 -
机器人
+关注
关注
213文章
31386浏览量
223545 -
激光雷达
+关注
关注
982文章
4531浏览量
197047
原文标题:机器人激光雷达模块中器件如何选择?
文章出处:【微信号:elecfans,微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
固态激光雷达参数以及避障视频
禾赛科技全面领跑机器人激光雷达市场

禾赛科技2025年割草机器人3D激光雷达出货量第一
Infineon移动机器人电机控制方案深度解析
SPAD+VCSEL+LDD+MPD,海思推出高精度激光雷达方案
移动机器人“芯”引擎爆发,禾赛、海思新品逆袭

移动机器人技术的发展历程
恩智浦自主移动机器人设计要点

德州仪器加速激光雷达在机器人中的应用

AGV/AMR机器人单线激光雷达选型指南




评论