 思岚科技推多楼层运动机器人平台雅典娜Athena2.0
思岚科技推多楼层运动机器人平台雅典娜Athena2.0

继Hermes之后,拥有全新智能梯控系统的多楼层运动机器人平台雅典娜Athena2.0来啦!
Athena2.0以“性能更强、体积更小、部署更轻、协作更灵”为方向,聚焦便利店、巡检站、餐厅等对机器人体积有要求、自身面积有限制的场景,提升机器人在这类场景中应用的适配性。
Athena 2.0基于全新工业设计,机身小巧紧凑,过窄道能力强。搭载全新的SLAM Cube 2自主定位导航系统及激光视觉多重导航方案,自主上下电梯,实现多楼层之间的自主移动。标准的开发软硬件接口支持用户快速二次开发,为您呈现最佳多楼层机器人开发平台和解决方案。
Athena2.0 亮点抢先看
智能梯控4.0系统
搭载全新的SLAM Cube2导航魔方
轻部署,支持大多数电梯品牌
激光+视觉双重SLAM 导航方案
机身紧凑,55cm窄道通过能力
多机协作,支持多点配送
19H续航、10°爬坡能力
支持多种传感器选配
三大技术提升,移动性能更强
Athena2.0内置新一代SLAM Cube2自主定位导航系统,不仅拥有更优秀的行走性能,还为客户预留多种传感器接口,自主开发,实现不同的功能。
Athena2.0采用最新升级的智能梯控4.0系统,突破了梯控设备在面临雨雪等恶劣天气和高层楼气压通信不定的难题,精准监测电梯状态,实现灵活且稳定的机器人多楼层移动作业。
配备激光+视觉双重导航系统,搭载Athena2.0开发平台的机器人对复杂环境的适应性更强。
越障爬坡,移动更具效率
Athena 2.0作为思岚新一代性能强劲的机器人开发平台,集19H空载续航和10°爬坡越障能力于一身,全面保障机器人运行需求,让移动更具效率。
传感器选配,满足差异化性能
客户还可根据实际使用需求,对Athena2.0加装多种传感器组合,实现不同的功能效果,扩大在酒店、园区、外卖柜、餐柜等商用场景的应用。
-
传感器
+关注
关注
2577文章
55460浏览量
793777 -
机器人
+关注
关注
213文章
31402浏览量
223560 -
思岚科技
+关注
关注
2文章
106浏览量
6077
发布评论请先 登录
21.0975 公里,是人形机器人的里程碑,也是 RISC-V 的新起点

电压放大器在四足压电移动机器人运动输出特性实验中的应用

AutoCore 联合贝启科技和瑞芯微,发布AutoRobo国产化机器人平台,打通“原型到量产”最后一公里

移动机器人“芯”引擎爆发,禾赛、海思新品逆袭

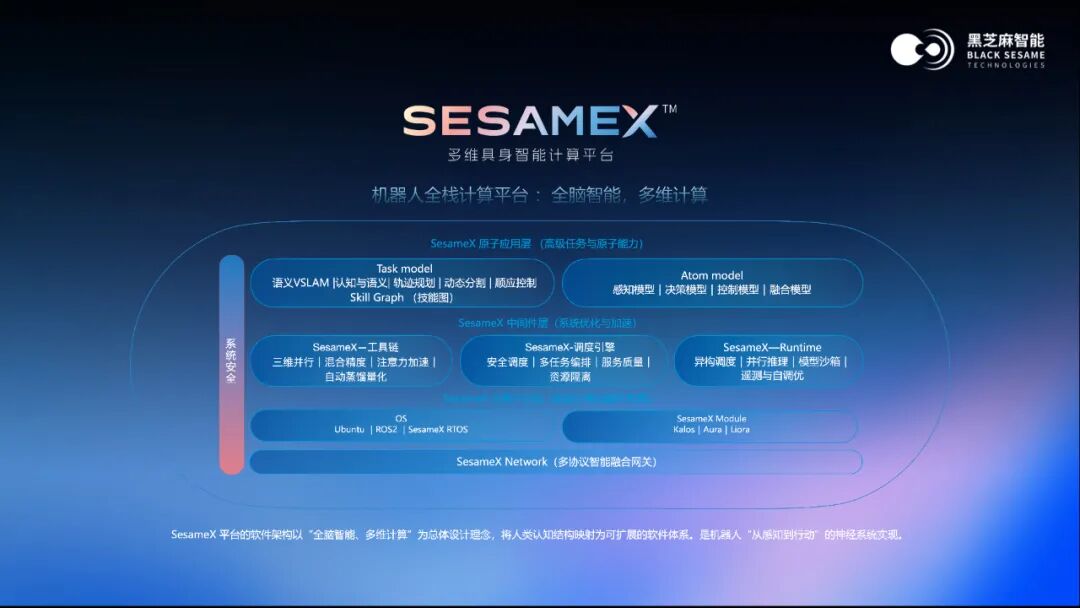
黑芝麻智能推出面向机器人产业的SesameX多维智能计算平台
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
黑芝麻智能AI全栈机器人计算平台荣膺国际大奖
机器人看点:越疆机器人正式发布六足仿生机器狗 智元公布机器人运动控制模型专利
专为机械臂打造!思岚48V具身智能版底盘强势登场,助力具身智能场景落地!




评论