 激光雷达中的激光发射与接收光学原理
激光雷达中的激光发射与接收光学原理

1激光雷达(英文:Laser Radar)
是以发射激光束探测目标的位置、速度等特征量的雷达系统。其工作原理是向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数,从而对飞机、导弹等目标进行探测、跟踪和识别。它由激光发射机、光学接收机、转台和信息处理系统等组成,激光器将电脉冲变成光脉冲发射出去,光接收机再把从目标反射回来的光脉冲还原成电脉冲,送到显示器。
2激光雷达特点
1:激光雷达是由微波雷达发展而来
2:激光雷达可以呈现更多细节
表1是激光雷达、微波雷达与摄像头的对比。
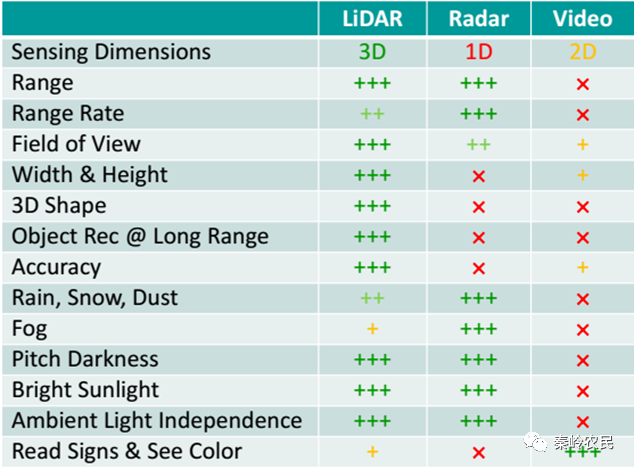
激光雷达的工作原理与雷达非常相近,以激光作为信号源,由激光器发射出的脉冲激光,打到地面的树木、道路、桥梁和建筑物上,引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离,脉冲激光不断地扫描目标物,就可以得到目标物上全部目标点的数据,用此数据进行成像处理后,就可得到精确的三维立体图像。

图1 激光雷达点阵图
2激光雷达的优势
1)更高的分辨率
假设接收天线入瞳大小为10mm,905nm激光对应角分辨率为0.22mrad,30GHz微波对应角分辨率为2.44rad。
2)更小的光束发散角
3)更大的多普勒频移
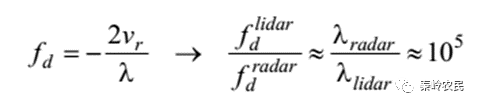
相干探测的速度分辨率高。
3三维实现方式:单点扫描
4三维实现方式:面阵探测+覆盖照明
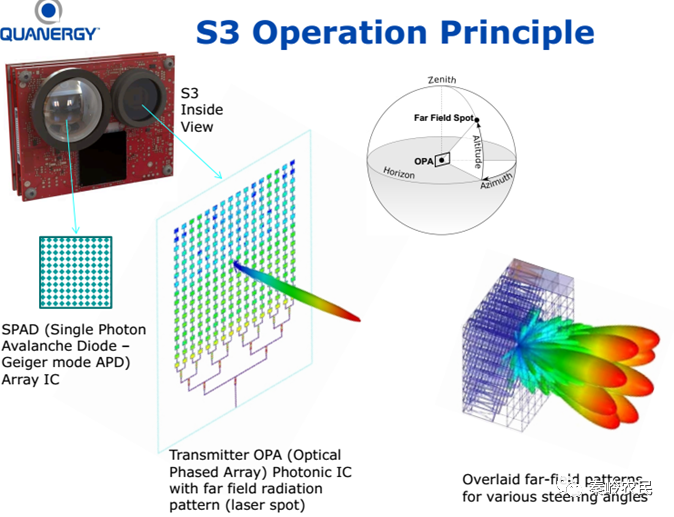
代表:Jigsaw计划
1) 2000~2003年美国国防部高级研究计划署(DARPA)实施了高精度激光3D成像雷达研究计划(即Jigsaw计划)
2) 对地面伪装物下的目标进行探测:要求在100米高空以上的数据采集和传输;对地面的探测范围可以达到20平方米;飞机的速度是每秒25-35米,并全天工作。
3) MIT林肯实验室开发出一种32´32Si-GM/APD焦平面探测器,且集成高速数字式CMOS计时电路,室温下单光子探测效率大于20%。
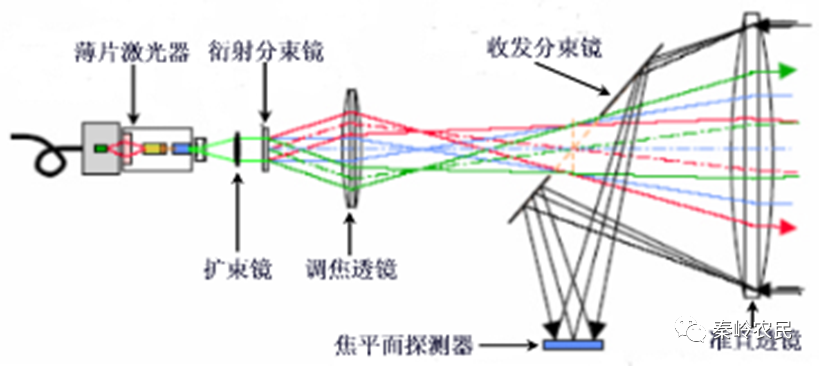
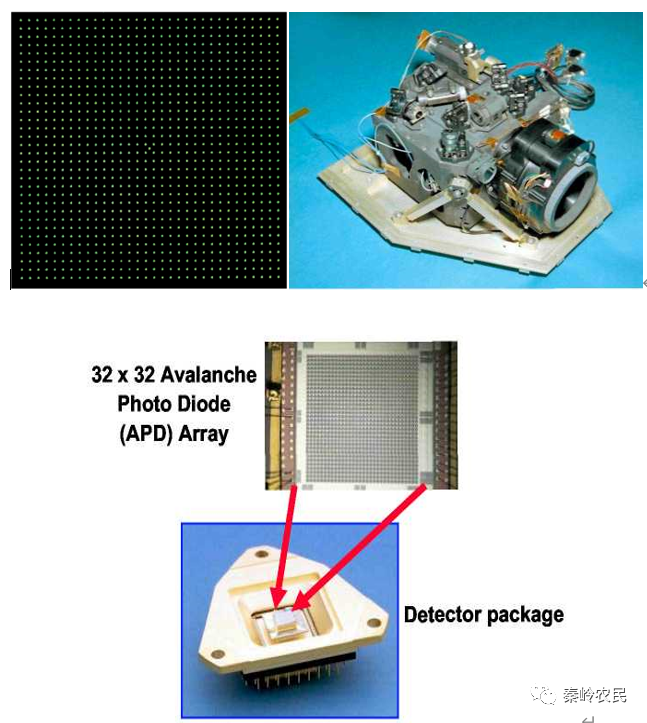
图2 MIT林肯实验室研制的Jigsaw 非扫描焦平面激光成像光学头
6激光雷达工作过程
激光雷达工作过程:
1)激光到目标的传输(激光发射系统);
2)目标对激光的反射、散射;
3) 接收机对散射光的收集(接收系统)。
7激光发射系统
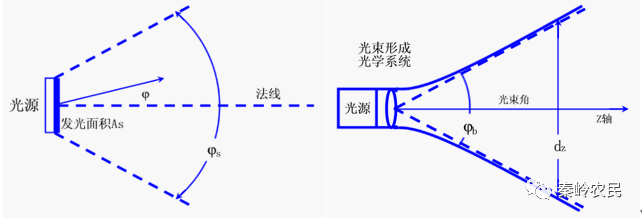
图3 激光雷达光学发射系统
在激光雷达设计和分析中,经常遇到三种典型的光束形状:
高斯光束、爱里光束、均匀光束(平面波)
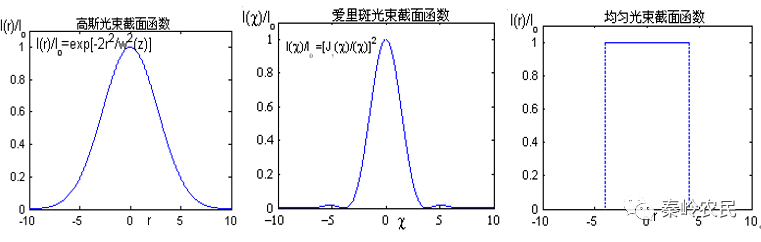
图4 激光光束波形
7.1高斯光束:固体激光器、光纤激光器等
在远场,高斯光束的发散角(1/e2)可以近似

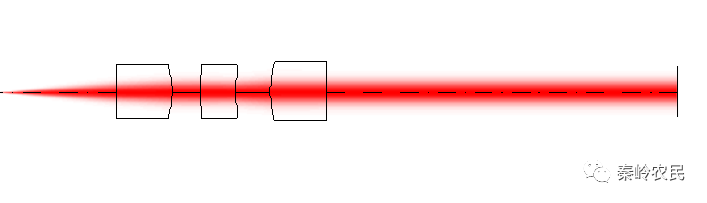
图4 激光扩束准直系统
如上图4 束腰10微米,发散角127mrad激光进行扩束准直为束腰2mm
发散角0.32mrad。
8半导体激光器光源
激光器的快轴发散角需达到65°,慢轴发散角需达到20°,且在激光器发散角±5°范围内的能量大于总能量的50%;一般发射系统发散角:越小越好,<1mrad;目前大部分三维激光雷达的发射光束为准直光束扫描。
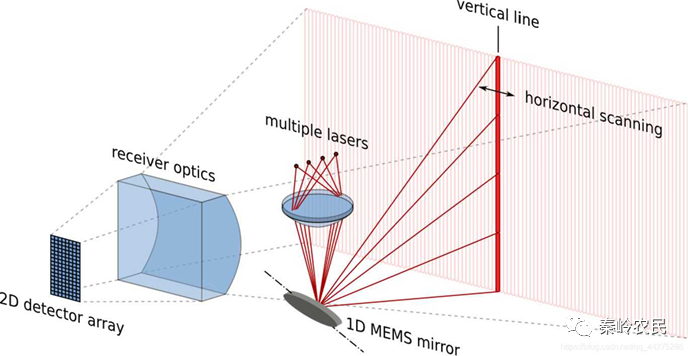
图5 一种MEMS扫描雷达
9目标散射
目标的散射特性与材料、粗糙度等有关;通常用BRDF函数描述散射特性;一般计算中常把物体作为朗伯体处理。
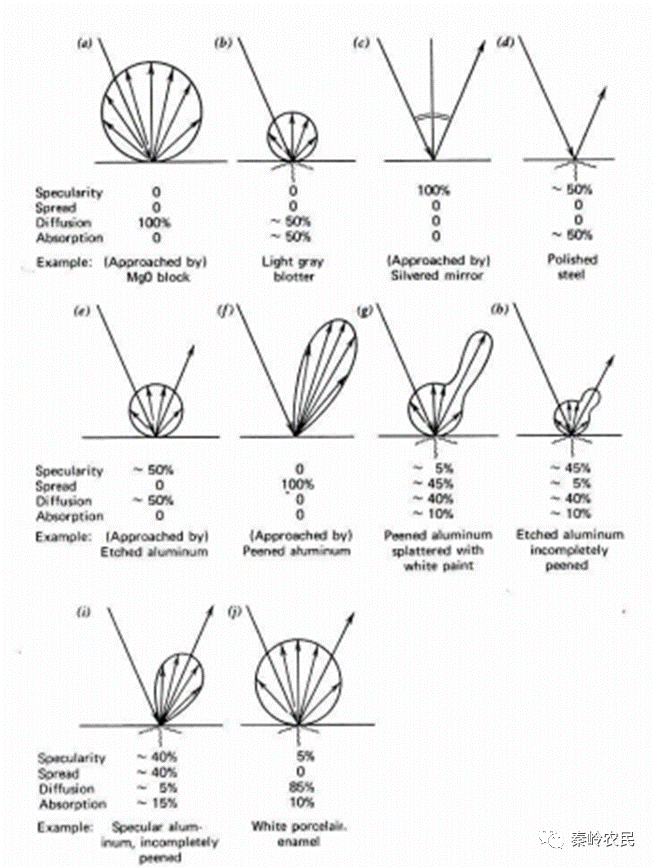
图6 散射模型
9.1目标散射模型
BRDF:双向反射分布函数;光滑面的散射模型:Abg模型、Heavy模型、粗糙面的散射模型:Phong模型、多项式模型。常用仿真软件:Tracepro、Lighttools、ASAP、FRED
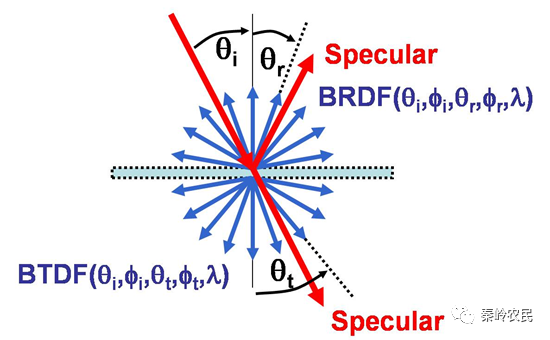
图7 BRDF散射模型
10接收系统
激光雷达接收天线即光学镜头
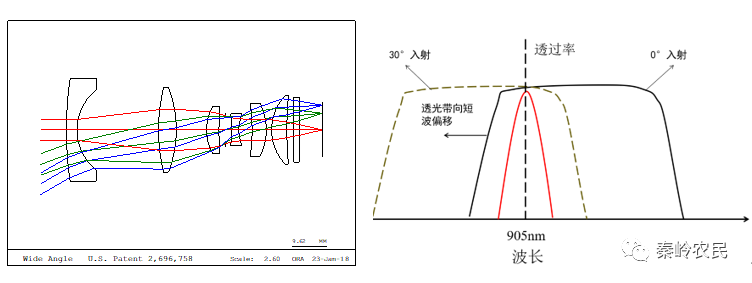
图8 阵列接收镜头与滤光片的光学漂移
11接收镜头评价标准
11.1点目标评价标准
点目标的探测常常是非成像系统,因为它不提供形态信息。对它的光学系统设计主要看能量包络图及点列图,能量包络图表示它的能量集中度,点列图看能量分布细节,包括形状(圆度)及像斑质心。不需要MTF,它的评价是S/N,至少应大于3,在应用上对它的评价是探测率及虚警率,它只是告知有与无,不能确定是什么。
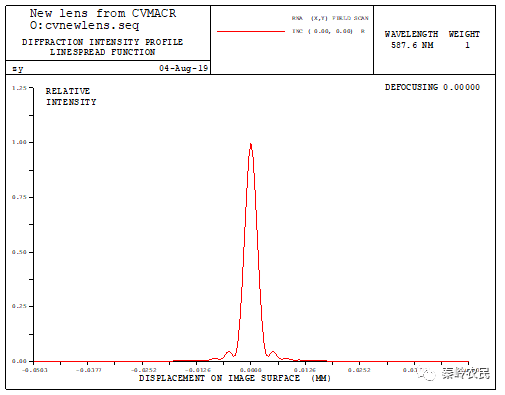
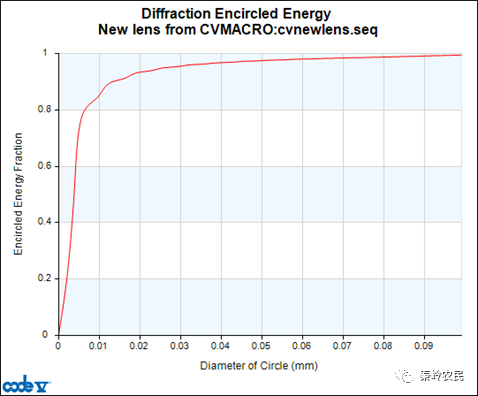
图7 点目标评价:点扩散函数和包围圆能量
11.2面目标评价
面目标即扩展目标(extended object),面目标的像充满视场(探测器感光面),普通照相机都属于这一类,它是成像系统。对它的图像质量有要求,通常用MTF及S/N评估。面目标在探测器上像的强度(照度)与距离无关。
MTF调制传递函数
空间频率对应的对比度
空间频率:lp/mm
奈圭斯特频率:采样频率须大于信号频率的两倍,即每个周期(一对黑白条纹)对应两个像素。
12功率预算
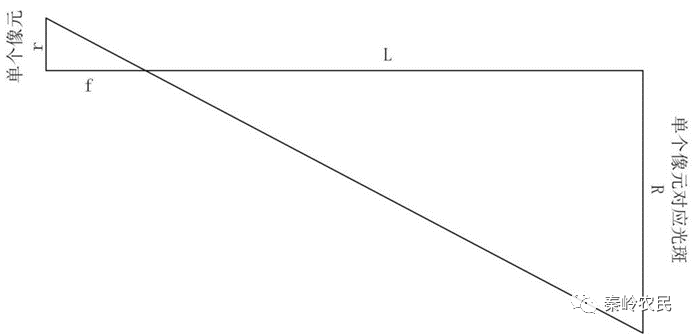
立体角:
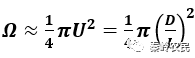
像元接收功率:

E0为物体照度;Ro为物体反射率;ta为空气透过率;tr为接收系统透过率;tt为发射系统透过率。
审核编辑 :李倩
-
光学
+关注
关注
4文章
895浏览量
38304 -
雷达系统
+关注
关注
7文章
266浏览量
29655 -
激光雷达
+关注
关注
983文章
4595浏览量
197399
原文标题:激光雷达中的激光发射与接收光学原理
文章出处:【微信号:gh_38186cae1d9a,微信公众号:秦岭农民】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为啥自动驾驶不使用1550纳米激光雷达?

固态激光雷达参数以及避障视频
自动驾驶激光雷达会伤害人体吗?

如何解决激光雷达点云中“鬼影”和“膨胀”问题?

激光雷达点云中“鬼影”和“膨胀”是什么原因导致的?
ToF 技术再进化:面阵固态激光雷达在各环境中的可靠性

激光雷达为什么会出现串扰的问题?

自动驾驶里的激光雷达有何作用?

800线!禾赛发布ETX激光雷达
自动驾驶激光雷达可以安装在哪些位置?

全固态激光雷达为什么迟迟未来?其技术难点是什么?
SPAD席卷车载激光雷达市场
第三方激光雷达ASIC方案,能改变行业格局吗?
超酷的树莓派激光雷达扫描仪!




评论