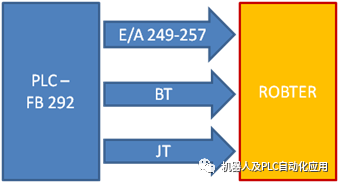
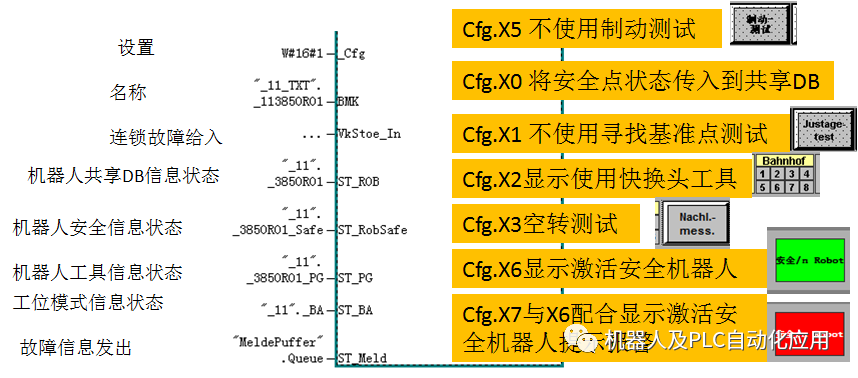
 VASS 05安全机器人PLC控制FB292
VASS 05安全机器人PLC控制FB292


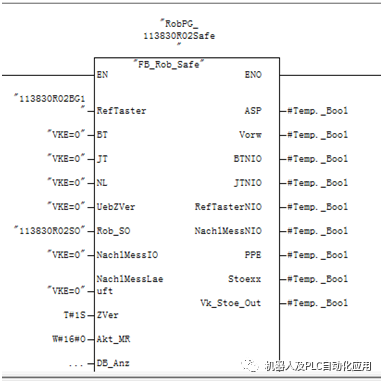

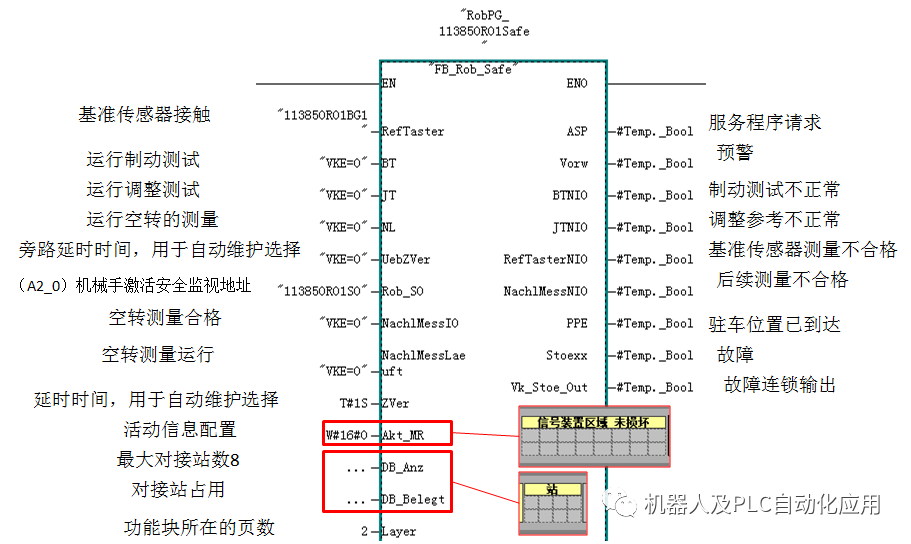
RefTaster : BOOL 基准传感器 SafeRangeMonitoring
BT : BOOL 运行制动测试
JT : BOOL 运行调整测试
UebZVer : BOOL 旁路延时时间,用于自动维护选择
ZVer : TIME 延时时间,用于自动维护选择
画面参数转移
GlobAnwProz := DB_ARG.GlobAnwProz;
(*检查页面是否正确(在机器人1-8页之间)
IF Layer < 1 OR Layer > 8 THEN
xLayerNIO := True;
ELSE
xLayerNIO := False;
iLayerIntern := Layer + 1;
END_IF;
xLayerAktiv := ((GlobAnwProz[0].B1 =INT_TO_BYTE(Layer)) AND NOT xLayerNIO) OR (GlobAnwProz[0].B1 = Byte#255); 页面激活
(* HMI-WINCC按钮控制)

xS_NachlMess := (bVisuTasten = BYTE#5); 空转测试
xS_AwBT := (bVisuTasten = BYTE#6);抱闸测试
xS_AwJT := (bVisuTasten = BYTE#7);基准点测试
xS_Wartung := (bVisuTasten = BYTE#8);去维修位置
xBT := BYTE_TO_BOOL(ST_ROB.A249_256_EnergyMM);A249刹车测试
xJT := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=1));A250调整测试反馈
xASP :=BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=2)); A251请求服务程序
xVVB := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=3));A252警告刹车磨损
xFBT := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=4)); A253刹车测试n.i.O.
xFJT := BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=5));A254调整参考n.i.O.
xPPE:= BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=6));A255到达停车位置
xSM:= BYTE_TO_BOOL(SHR(IN:=ST_ROB.A249_256_EnergyMM,N:=7));A256总故障
运行制动测试或调整测试
在每个工作顺序和维护顺序的开始时,机器人会查询制动测试选择、调整测试选择和服务程序请求等信号。如果有某个选择信号或请求信号,则执行相应的函数。函数运行结束时,选择或请求信号将立即被复位,接着执行该顺序。
选择制动测试或调整测试
如果机器人处于顺序 125 中的零位且没有其它后续任务,则选择制动测试或调整测试时将在设置的延时时间 'ZVer' 过后自动地为机器人选择维护。一旦完成制动测试或调整测试,立即重新对维护位置进行自动确认。如果机器人需要无任何延时地执行所选函数,则必须采用“维护” 按钮选择维护,或者,让'UebZVer' 块为TRUE。一旦完成制动测试或调整测试,立即对维护位置进行自动确认。
--------------------------------END-----------------------
审核编辑 :李倩
-
机器人
+关注
关注
213文章
31402浏览量
223560 -
plc
+关注
关注
5052文章
14783浏览量
488393
原文标题:VASS 05 安全机器人PLC控制FB292
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
从PLC到机器人:实时操作系统如何决定能力上限
机器人用霍尔电流传感器,能提升操作安全性么?

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
揭秘工业 4.0 机器人:感知、安全和控制技术

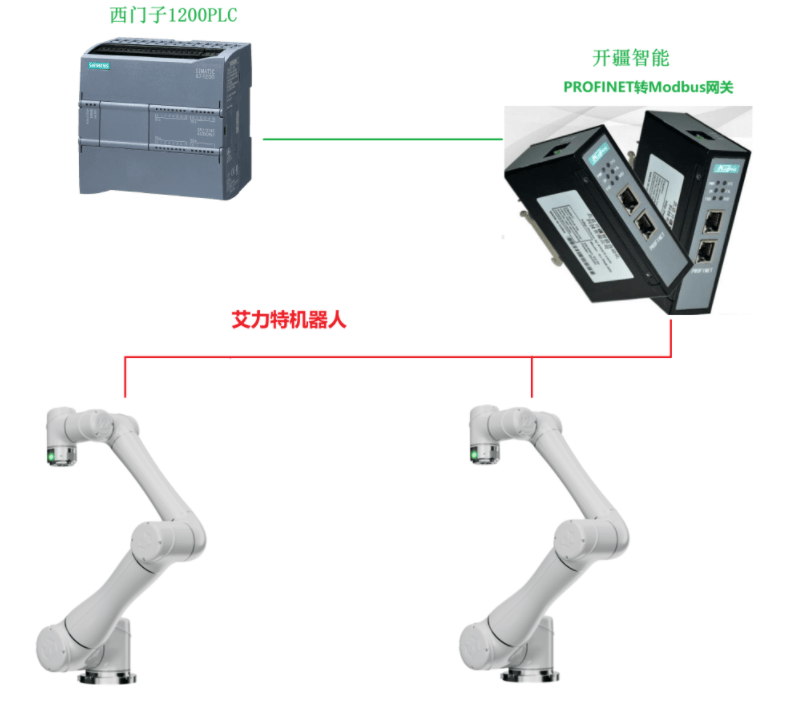
开疆智能Profinet转ModbusTCP网关连接艾力特机器人配置案例
ADI安全产品如何简化不同机器人控制系统中安全机制的实现

ADI解读机器人控制系统中的安全风险和有效安全措施 为机器人技术的未来发展筑牢安全防线


工业机器人的特点
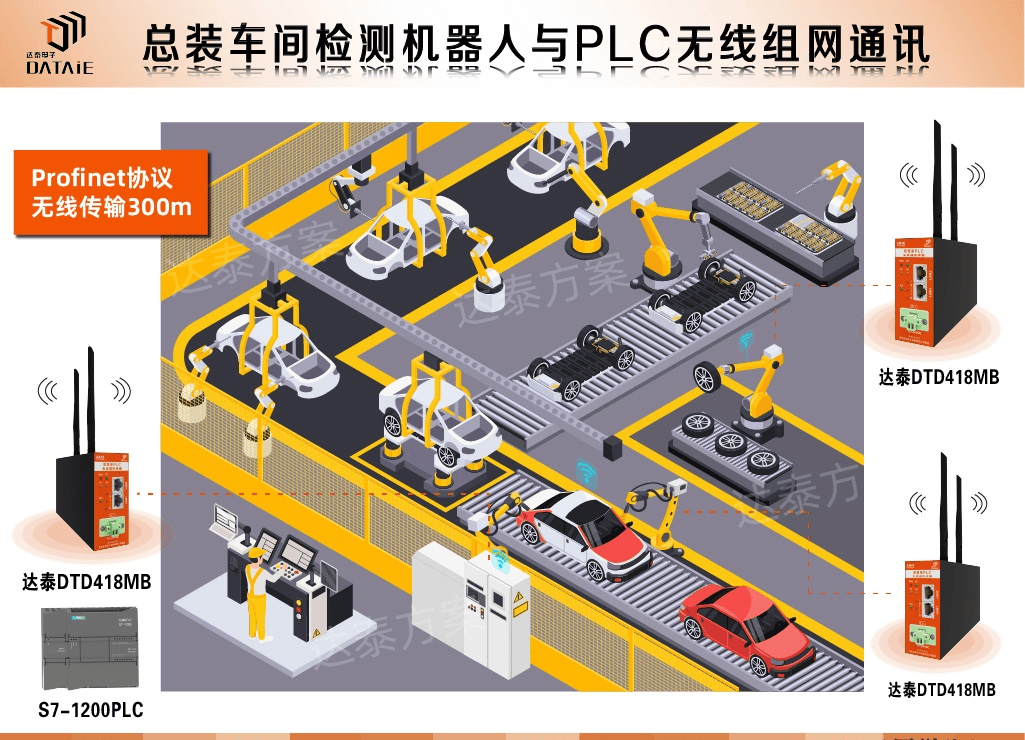
汽车制造车间检测机器人与PLC无线以太网实时控制方案



评论