 KUKA机器人变量$ FCT_CALL在TCP/IP的应用
KUKA机器人变量$ FCT_CALL在TCP/IP的应用

命令通道 $ FCT_CALL 的管理编号(句柄)
CWRITE() 函数可用于通过 $FCT_CALL 命令通道调用函数。变量本身是写保护的。
例如:
EKI_STATUS = EKI_Init(CHAR[])初始化TCP/IP通讯通道
EKI_STATUS = EKI_Open(CHAR[])打开TCP/IP通讯
EKI_STATUS = EKI_Close(CHAR[])关闭TCP/IP通讯
EKI_STATUS = EKI_Clear(CHAR[])清除TCP/IP通讯通道里的内容
这些通讯功能函数最终都会通过下列运算来实现控制:
初始化TCP/IP通讯通道
CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Init",strChannelName[])
关闭TCP/IP通讯
CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Close",strChannelName[])
打开TCP/IP通讯
CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Open",strChannelName[])
清除TCP/IP通讯通道里的内容
CWRITE($FCT_CALL,Stat,Mode,"EFC_eki_Clear",strChannelName[])
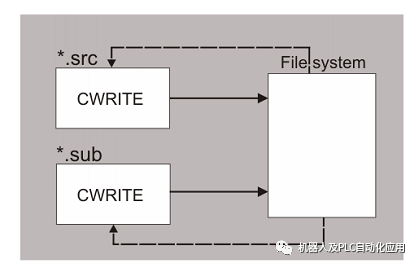
通过命令通道$ FCT_CALL进行通讯
机器人控制器通过加载的外部模块从另一个控制器(例如从摄像机系统)接收位置数据。机器人控制器使用CREAD从外部模块读取这些位置数据。CWRITE可用于通过命令通道在文件系统上执行操作。示例:通过命令通道打开文件,然后在文件中写入一个字符或字符串。可以从机器人解释程序或提交解释程序调用文件系统功能。不允许从一个解释器打开文件然后从另一个解释器访问文件,例如 写入或再次关闭文件。
调用文件系统功能时,会将特定数量的参数传输到该功能。这些函数中的每一个都通过CWRITE提供返回值。返回值指示该函数是成功执行还是因错误而中止。如果发生错误,可以使用返回的错误号来定位原因。
通过命令通道$ FCT_CALL进行通信
审核编辑 :李倩
-
命令
+关注
关注
5文章
765浏览量
24118 -
变量
+关注
关注
0文章
616浏览量
29622 -
KUKA机器人
+关注
关注
4文章
144浏览量
10123
发布评论请先 登录
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
Neway电机方案在机器人技术方面的优势
探索RISC-V在机器人领域的潜力
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由!
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
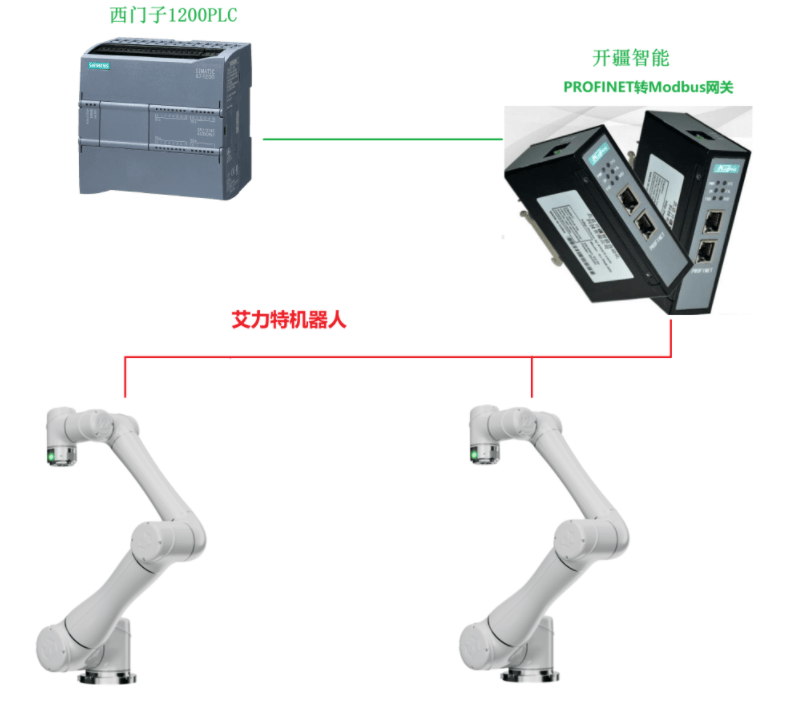
开疆智能Profinet转ModbusTCP网关连接艾力特机器人配置案例
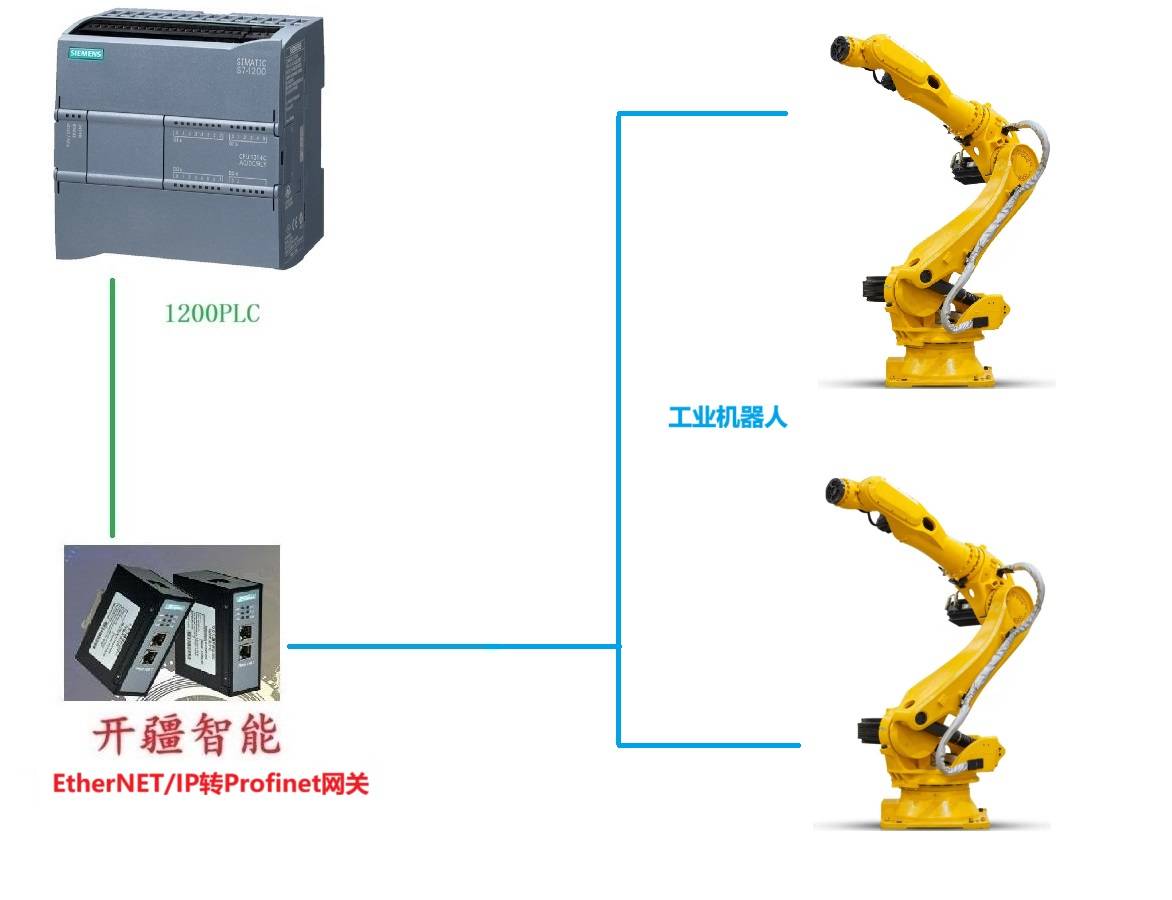
开疆智能Profinet转EtherNET/IP网关连接机器人配置案例
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
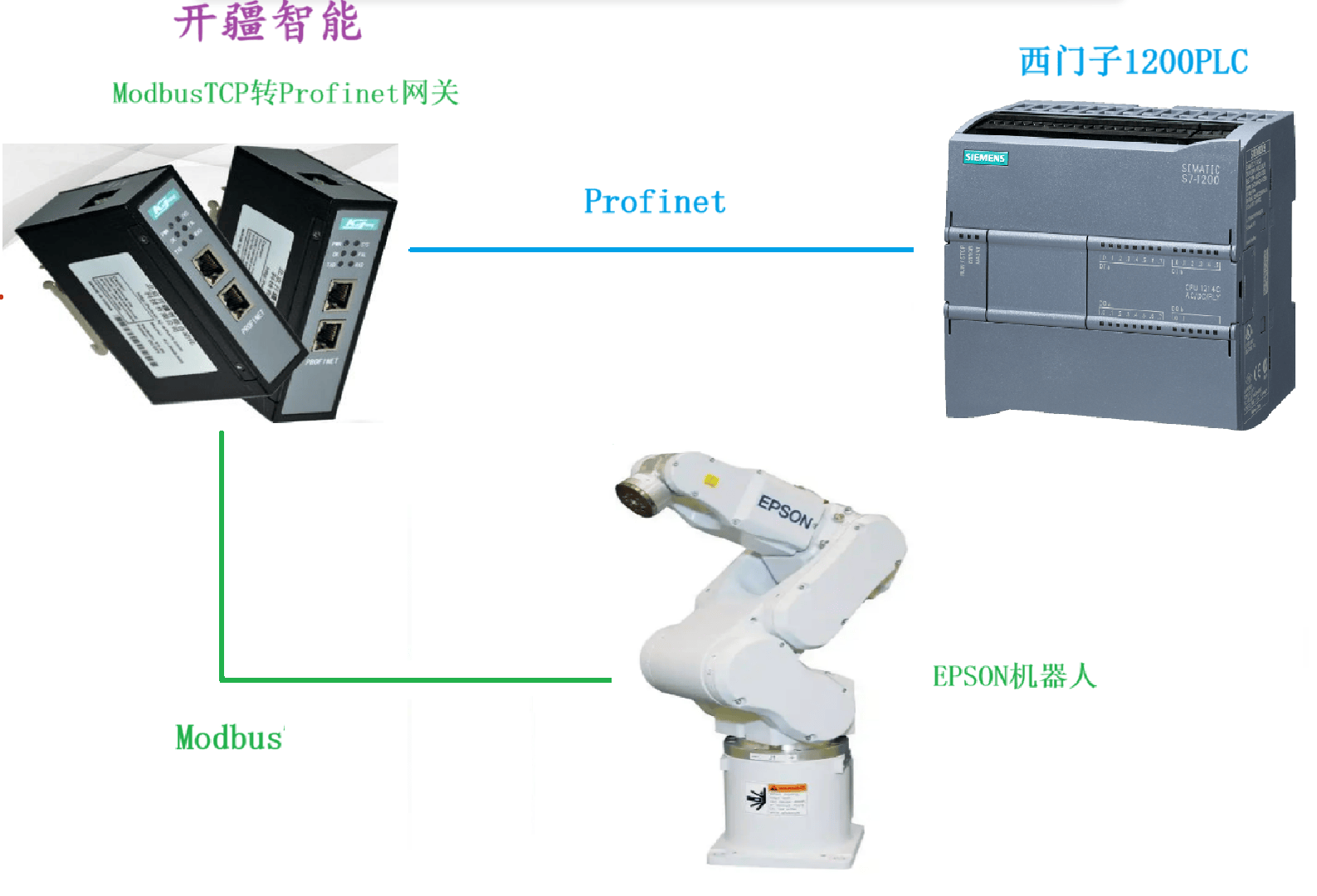
开疆智能ModbusTCP转Profinet网关连接EPSON机器人配置案例
开疆智能ModbusTCP转Profinet网关连接安川YRC1000机器人配置案例
工业机器人的特点
跨协议探秘:profinet转ethernet ip网关搞定川崎机器人与PLC通信

工业机器人与协作机器人概念不同




评论