 FPGA与MCU的程序思路
FPGA与MCU的程序思路

FPGA以9600的波特率向单片机发送32位数据,然后单片机对数据进行解析,显示在显示屏上面
波特率的产生 :9600bps是指每秒钟发送9600个bit,即1bit的时间为1/9600,fpga板子自带50M晶振,那么一bit的时间时1/9600/1/50M
在没有检验位的情况下,每一帧数据是10位 第一位起始位 0 2-9位 数据(低位在前,高位在后),第十位 终止位 1
FPGA程序思路 :首先由fpga计数,每隔一段时间产生一个bps_clk,也就是波特率的驱动时钟,发送状态机共分为7个状态
IDLE :发送起始标志为 TX_1 :发送32数据的高八位,其中低位在前,高位在后 ...... STOP :终止标志位 STOP_1 : 是专门用来延时的,刚开始没有延时状态
的情况下,FPGA向单片机发送数据过快,非常占用单片机的中断资源,所以加了一个延时模块 stop ,作用是:每发完一次数据等待100ms然后再发第二次数据,这样的
单片机就有时间干别的事情了。
MCU程序思路 :首先在中断函数里面将FPGA发送过来的数据存到一个数组里面来处理,detect-uart()函数是用来分析数组的,首先检测数组里面的起始标志 ‘t’,如果没有检测到
终止标志位‘x’的话,对中间数据进行移位处理,还原以前的32位宽的数据,由于在数据传送时有误码的情况,所以在display中加了三级缓存,来减少出错的可能性。
module uart_tx(
//global clock
input clk,
input rst_n,
//uart interface
output reg uart_tx,
//user interface
input [31:0] pinlv,
input pinlv_value
);
parameter BPS_9600 = 5208;
//parameter BPS_9600 = 10;
//count for bps_clk
reg [14:0] cnt_bps_clk;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
cnt_bps_clk <= 1'b0;
else if(pinlv_value == 0)
cnt_bps_clk <= 1'b0;
else if(cnt_bps_clk == BPS_9600 - 1)
cnt_bps_clk <= 1'b0;
else
cnt_bps_clk <= cnt_bps_clk + 1;
end
reg [31:0] cnt_bps_stop;
wire stop_done;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
cnt_bps_stop <= 0;
else if(state == STOP)
cnt_bps_stop <= 0;
else if(cnt_bps_stop > 50_000_00)
cnt_bps_stop <= 0;
else
cnt_bps_stop <= cnt_bps_stop + 1;
end
assign stop_done = (cnt_bps_stop == 49_000_00)? 1 : 0;
//clk for bps
reg bps_clk;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
bps_clk <= 1'b0;
else if(cnt_bps_clk == 1)
bps_clk <= 1'b1;
else
bps_clk <= 1'b0;
end
//cnt for bps
reg [14:0] bps_cnt;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
bps_cnt <= 1'b0;
else if(bps_cnt == 10)
bps_cnt <= 0;
else if(bps_clk)
bps_cnt <= bps_cnt + 1'b1;
else
bps_cnt <= bps_cnt;
end
//tx state
localparam IDLE = 4'd0;
localparam TX_1 = 4'd1;
localparam TX_2 = 4'd2;
localparam TX_3 = 4'd3;
localparam TX_4 = 4'd4;
localparam STOP = 4'd5;
localparam STOP_1 = 4'd6;
//cnt state
reg [3:0] state;
always @(posedge clk or negedge rst_n)
begin
if(!rst_n)
state <= IDLE;
else if(state == STOP_1 && stop_done)
state <= IDLE;
else if(bps_cnt == 10 && (state != STOP_1))
state <= state + 1;
end
// state
always @(posedge clk )
begin
if(bps_clk)
begin
case(state)
IDLE : // 't' di -- gao
begin
case(bps_cnt)
4'd0 : uart_tx <= 0; //begin
4'd1 : uart_tx <= 0;//data
4'd2 : uart_tx <= 0;
4'd3 : uart_tx <= 1;
4'd4 : uart_tx <= 0;
4'd5 : uart_tx <= 1;
4'd6 : uart_tx <= 1;
4'd7 : uart_tx <= 1;
4'd8 : uart_tx <= 0;
4'd9 : uart_tx <= 1; //stop
default : uart_tx <= 1;
endcase
end
TX_1 : //tx_1byte
begin
case(bps_cnt)
4'd0 : uart_tx <= 0; //begin
4'd1 : uart_tx <= pinlv[24];//data
4'd2 : uart_tx <= pinlv[25];
4'd3 : uart_tx <= pinlv[26];
4'd4 : uart_tx <= pinlv[27];
4'd5 : uart_tx <= pinlv[28];
4'd6 : uart_tx <= pinlv[29];
4'd7 : uart_tx <= pinlv[30];
4'd8 : uart_tx <= pinlv[31];
4'd9 : uart_tx <= 1; //stop
default : uart_tx <= 1;
endcase
end
TX_2 : //tx_1byte
begin
case(bps_cnt)
4'd0 : uart_tx <= 0; //begin
4'd1 : uart_tx <= pinlv[16];//data
4'd2 : uart_tx <= pinlv[17];
4'd3 : uart_tx <= pinlv[18];
4'd4 : uart_tx <= pinlv[19];
4'd5 : uart_tx <= pinlv[20];
4'd6 : uart_tx <= pinlv[21];
4'd7 : uart_tx <= pinlv[22];
4'd8 : uart_tx <= pinlv[23];
4'd9 : uart_tx <= 1; //stop
default : uart_tx <= 1;
endcase
end
TX_3 : //tx_1byte
begin
case(bps_cnt)
4'd0 : uart_tx <= 0; //begin
4'd1 : uart_tx <= pinlv[8];//data
4'd2 : uart_tx <= pinlv[9];
4'd3 : uart_tx <= pinlv[10];
4'd4 : uart_tx <= pinlv[11];
4'd5 : uart_tx <= pinlv[12];
4'd6 : uart_tx <= pinlv[13];
4'd7 : uart_tx <= pinlv[14];
4'd8 : uart_tx <= pinlv[15];
4'd9 : uart_tx <= 1; //stop
default : uart_tx <= 1;
endcase
end
TX_4 : //tx_1byte
begin
case(bps_cnt)
4'd0 : uart_tx <= 0; //begin
4'd1 : uart_tx <= pinlv[0];//data
4'd2 : uart_tx <= pinlv[1];
4'd3 : uart_tx <= pinlv[2];
4'd4 : uart_tx <= pinlv[3];
4'd5 : uart_tx <= pinlv[4];
4'd6 : uart_tx <= pinlv[5];
4'd7 : uart_tx <= pinlv[6];
4'd8 : uart_tx <= pinlv[7];
4'd9 : uart_tx <= 1; //stop
default : uart_tx <= 1;
endcase
end
STOP : // 'x' di -- gao
begin
case(bps_cnt)
4'd0 : uart_tx <= 0; //begin
4'd1 : uart_tx <= 0;//data
4'd2 : uart_tx <= 0;
4'd3 : uart_tx <= 0;
4'd4 : uart_tx <= 1;
4'd5 : uart_tx <= 1;
4'd6 : uart_tx <= 1;
4'd7 : uart_tx <= 1;
4'd8 : uart_tx <= 0;
4'd9 : uart_tx <= 1; //stop
default : uart_tx <= 1;
endcase
end
STOP_1 :
begin
uart_tx <= 1;
end
default :
uart_tx <= 1;
endcase
end
else
uart_tx <= uart_tx;
end
endmodule
/*************** 用户定义参数 *****************************/ #define MAIN_Fosc 11059200L //define main clock #define Baudrate1 9600 //define the baudrate, 如果使用BRT做波特率发生器,则波特率跟串口2一样 //12T mode: 600~115200 for 22.1184MHZ, 300~57600 for 11.0592MHZ #define Baudrate2 19200 //define the baudrate2, //12T mode: 600~115200 for 22.1184MHZ, 300~57600 for 11.0592MHZ #define BUF_LENTH 20 //定义串口接收缓冲长度 /**********************************************************/ #includesfr AUXR1 = 0xA2; sfr AUXR = 0x8E; sfr S2CON = 0x9A; //12C5A60S2双串口系列 sfr S2BUF = 0x9B; //12C5A60S2双串口系列 sfr IE2 = 0xAF; //STC12C5A60S2系列 sfr BRT = 0x9C; unsigned char uart1_wr; //写指针 unsigned char uart1_rd; //读指针 unsigned char xdata RX1_Buffer[BUF_LENTH]; bit B_TI; unsigned char uart2_wr; //写指针 unsigned char uart2_rd; //读指针 unsigned char xdata RX2_Buffer[BUF_LENTH]; bit B_TI2; long temp1 = 0; long temp2 = 0; long temp_buf1 = 0; long temp_buf2 = 0; long temp_buf3 = 0; long temp_buf = 0; long ce = 9999; /****************** 编译器自动生成,用户请勿修改 ************************************/ #define T1_TimerReload (256 - MAIN_Fosc / 192 / Baudrate1) //Calculate the timer1 reload value at 12T mode #define BRT_Reload (256 - MAIN_Fosc / 12 / 16 / Baudrate2) //Calculate BRT reload value #define TimeOut1 (28800 / (unsigned long)Baudrate1 + 2) #define TimeOut2 (28800 / (unsigned long)Baudrate2 + 2) #define TI2 (S2CON & 0x02) != 0 #define RI2 (S2CON & 0x01) != 0 #define CLR_TI2() S2CON &= ~0x02 #define CLR_RI2() S2CON &= ~0x01 /**********************************************************/ /******************** 本地函数声明 ***************/ void uart1_init(void); void UART1_TxByte(unsigned char dat); void PrintString1(unsigned char code *puts); void delay(char x) { char i = 0; char t= 0; for(i = 0;i<110;i++) { for(t = 0;t < x;t++); } } void detect_uart() { char i = 0; char flag = 0; temp1 = 0; for(i = 0;i <= uart1_wr ; i++) { // UART1_TxByte(RX1_Buffer[i]); if(flag) { if(RX1_Buffer[i] != 'x' ) { temp1 = temp1 << 8 ; temp1 = temp1 + RX1_Buffer[i]; // UART1_TxByte(RX1_Buffer[i]); } else temp2 = temp1; } if(RX1_Buffer[i] == 't') { flag = 1; } } } //void ceshi() //{ // ce = 0; // ce = ce << 8 ; // ce = ce + 0xff; // ce = ce << 8 ; // ce = ce + 0x0c; // ce = ce << 8 ; // ce = ce + 0xcc; // ce = ce << 8 ; // ce = ce + 0xcc; //// ce = 9999; //} void display() { char flag = 0; temp_buf3 = temp_buf2; temp_buf2 = temp_buf1; temp_buf1 = temp2; if(temp_buf3 == temp2) { temp_buf = temp2; } else { temp_buf = temp_buf; } UART1_TxByte('S');UART1_TxByte(' ');UART1_TxByte(' ');UART1_TxByte(' ');UART1_TxByte(' '); if(temp_buf/100000000 == 0) //bai M { UART1_TxByte(' '); } else { UART1_TxByte(temp_buf/100000000 + 0x30); flag = 1; } if(temp_buf/10000000%10 == 0 ) //shi M { if(!flag) { UART1_TxByte(' '); } else { UART1_TxByte(0x30); } } else { UART1_TxByte(temp_buf/10000000%10 + 0x30); flag = 1; } if(temp_buf/1000000%10 == 0 ) //M { if(!flag) { UART1_TxByte(' '); } else { UART1_TxByte(0x30); } } else { UART1_TxByte(temp_buf/1000000%10 + 0x30); flag = 1; } if(temp_buf/100000%10 == 0 ) //bai K { if(!flag) { UART1_TxByte(' '); } else { UART1_TxByte(0x30); } } else { UART1_TxByte(temp_buf/100000%10 + 0x30); flag = 1; } if(temp_buf/10000%10 == 0 ) //shi k { if(!flag) { UART1_TxByte(' '); } else { UART1_TxByte(0x30); } } else { UART1_TxByte(temp_buf/10000%10 + 0x30); flag = 1; } if(temp_buf/1000%10 == 0 ) // K { if(!flag) { UART1_TxByte(' '); } else { UART1_TxByte(0x30); } } else { UART1_TxByte(temp_buf/1000%10 + 0x30); flag = 1; } if(temp_buf/100%10 == 0 ) //bai { if(!flag) { UART1_TxByte(' '); } else { UART1_TxByte(0x30); } } else { UART1_TxByte(temp_buf/100%10 + 0x30); flag = 1; } if(temp_buf/10%10 == 0 ) //shi { if(!flag) { UART1_TxByte(' '); } else { UART1_TxByte(0x30); } } else { UART1_TxByte(temp_buf/10%10 + 0x30); flag = 1; } if(temp_buf%10 == 0 ) //ge { if(!flag) { UART1_TxByte(' '); } else { UART1_TxByte(0x30); } } else { UART1_TxByte(temp_buf%10 + 0x30); flag = 1; } } void main(void) { char i = 0; uart1_rd = 0; uart1_wr = 0; uart2_rd = 0; uart2_wr = 0; // AUXR |= 0x01; //串口1使用独立波特率发生器, 波特率跟串口2一样 AUXR1 |= (1<<4); //将UART2从P1口切换到 RXD2--P1.2切换到P4.2 TXD2---P1.3切换到P4.3 uart1_init(); PrintString1("串口1测试程序"); while(1) { display(); detect_uart(); } } void UART1_TxByte(unsigned char dat) { B_TI = 0; SBUF = dat; while(!B_TI); B_TI = 0; delay(10); } void PrintString1(unsigned char code *puts) //发送一串字符串 { for (; *puts != 0; puts++) UART1_TxByte(*puts); //遇到停止符0结束 } void uart1_init(void) { PCON |= 0x80; //UART0 Double Rate Enable SCON = 0x50; //UART0 set as 10bit , UART0 RX enable TMOD &= ~(1<<6); //Timer1 Set as Timer, 12T TMOD = (TMOD & ~0x30) | 0x20; //Timer1 set as 8 bits auto relaod TH1 = T1_TimerReload; //Load the timer TR1 = 1; ES = 1; EA = 1; } /**********************************************/ void UART0_RCV (void) interrupt 4 { if(RI) { RI = 0; RX1_Buffer[uart1_wr] = SBUF; if(++uart1_wr >= BUF_LENTH) uart1_wr = 0; } if(TI) { TI = 0; B_TI = 1; } }
原文标题:MCU与FPGA串口通信
文章出处:【微信公众号:FPGA之家】欢迎添加关注!文章转载请注明出处。
-
FPGA
+关注
关注
1664文章
22502浏览量
639242 -
单片机
+关注
关注
6078文章
45580浏览量
673664 -
mcu
+关注
关注
147文章
19128浏览量
403897
原文标题:MCU与FPGA串口通信
文章出处:【微信号:zhuyandz,微信公众号:FPGA之家】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
MCU软件升级设计思路分析
xilinx-A7 fpga 使用QSPI模式启动,项目需要用MCU做FPGA程序升级,请问MCU怎么操作SPIFLASH?
基于MCU和FPGA的数字式相位测量仪的设计
聚焦电子创新设计,分享MCU技术新思路
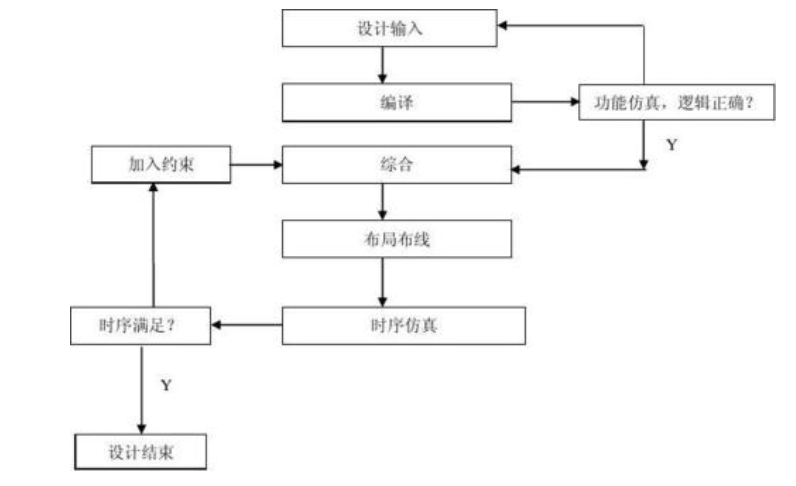
FPGA教程之FPGA系统设计的主要思路和方法初探资料说明
AGM MCU+FPGA

FPGA MCU FSMC通信接口——NAND Flash模式
远程升级单片机程序设计思路



评论